一种保护小型无人驾驶船舶的自动码头
1.本实用新型涉及码头技术领域,尤其是一种保护小型无人驾驶船舶的自动码头。
背景技术:
2.随着近年来大数据、云计算、虚拟现实和人工智能技术的迅速发展,无人驾驶船舶现已面世,并在近年来取得了阶段性的进步。与传统船舶对比起来,无人驾驶船舶具有降低人工成本、节能降耗、减少事故的优点去,而且无人船能够通过专家决策系统与远程遥控系统在劳动条件更好的岸上进行操作,从而从根本上减少人为因素对船舶航行安全的影响。无人船应用的领域也逐渐扩大,无论在航行运输、环境监测、海洋调查、工程测量等方面,都显示出了无可比拟的优势,因此市场前景广阔,成为近年来国际船舶发展的热点之一。
3.小型无人驾驶船舶一般停泊在码头等待任务的安排,但是由于小型无人驾驶船舶体型较小,容易受到风浪等不利因素的影响而出现侧翻,目前的码头不能够对小型无人驾驶船舶进行保护。而且目前的码头相对固定,当小型无人驾驶船舶停泊位置需要调整时,需要重新建设码头,使用不便利。
技术实现要素:
4.为了解决上述问题,本实用新型提供一种保护小型无人驾驶船舶的自动码头,能够对小型无人驾驶船舶进行保护,而且能够进行停泊位置的调整。
5.为了实现上述目的,本实用新型采用的技术方案为:
6.一种保护小型无人驾驶船舶的自动码头,包括主浮筒、拼接浮筒及连接螺钉,
7.所述主浮筒包括底部设有的两侧分别设有推进器,所述主浮筒内设有电池仓,所述电池仓设有锂电池,所述锂电池与所述推进器电连接,以使所述推进器驱动所述主浮筒移动;
8.所述主浮筒横截面为矩形结构,所述主浮筒四个侧边分别设有第一连接件,四个所述第一连接件位于不同的平面,且四所述第一连接件沿高度方向相间设置,所述第一连接件贯穿设有第一螺纹孔;
9.所述拼接浮筒横截面为正方形结构,所述拼接浮筒四个侧边分别设有第一连接件,四个所述第二连接件位于不同的平面,且四所述第二连接件沿高度方向相间设置,所述第二连接件贯穿设有第二螺纹孔;
10.所述主浮筒的侧面与所述拼接浮筒的侧面对准并抵接时,所述主浮筒与所述拼接浮筒相对一侧的所述第一螺纹孔及所述第二螺纹孔相互对准,所述连接螺钉能够与所述第一螺纹孔及所述第二螺纹孔螺纹连接,以使所述主浮筒与所述拼接浮筒进行拼接;
11.两所述拼接浮筒的侧面相互对准并抵接时,两所述拼接浮筒相对一侧的所述第二螺纹孔相互对准,所述连接螺钉能够与两所述第二螺纹孔螺纹连接,以使多个所述拼接浮筒之间进行拼接。
12.进一步地,所述连接螺钉套设有缓冲弹簧,所述缓冲弹簧一端与所述连接螺钉抵
接,另一端与所述第一连接件或所述第二连接件抵接。
13.进一步地,所述主浮筒及所述拼接浮筒的侧面设有限位槽及限位件,所述主浮筒的限位槽分别凹设于所述主浮筒相邻的两侧面上,所述主浮筒的限位件与所述主浮筒的限位槽相对设置,且所述主浮筒的限位件与所述主浮筒固定连接;
14.所述拼接浮筒的限位槽分别凹设于所述拼接浮筒相邻的两侧面上,所述拼接浮筒的限位件与所述拼接浮筒的限位槽相对设置,且所述拼接浮筒的限位件与所述拼接浮筒固定连接;所述主浮筒与所述拼接浮筒拼接时或所述拼接浮筒之间相互拼接时,不同侧面的所述限位槽及所述限位件相互卡接。
15.进一步地,所述推进器包括固定座、驱动电机及桨叶,所述固定座与所述主浮筒的底部连接,所述驱动电机与所述固定座固定连接,且所述桨叶与所述驱动电机的驱动轴传动连接,所述驱动电机与所述锂电池电连接。
16.进一步地,所述主浮筒内设有调节仓,所述调节仓位于所述电池仓靠近所述固定座的一端;
17.所述固定座固定设置有连接轴,所述连接轴穿入所述调节仓内,所述连接轴套设有密封轴承,且所述密封轴承与所述主浮筒转动连接;
18.所述调节仓内设有调节机构,所述调节机构包括调节齿盘、调节杆及第一电动伸缩杆,所述调节齿盘与所述连接轴位于所述调节仓内的一端固定连接,所述调节杆与所述主浮筒滑动连接,且所述调节杆的一侧设有与所述调节齿盘啮合的齿条,所述第一电动伸缩杆与所述主浮筒固定连接,且所述第一电动伸缩杆与所述调节杆固定连接,所述第一电动伸缩杆与所述锂电池电连接,所述第一电动伸缩杆驱动所述调节杆移动,以使所述调节杆带动所述调节齿盘转动。
19.进一步地,还包括充电机构,所述充电机构包括机械臂、第一充电盘、第二充电盘及控制器,
20.所述机械臂一端与所述主浮筒的端面连接,另一端与所述第一充电盘的一面连接,所述第一充电盘远离所述机械臂的一面嵌设有发射线圈及红外接收器;
21.所述第二充电盘设有在无人驾驶船舶上,且所述第二充电盘的上表面嵌设有接收线圈及红外发射器,所述接收线圈与所述无人驾驶船舶的电池电连接;
22.所述控制器分别与所述机械臂及红外接收器电连接,所述控制器根据所述红外接收器获得的所述红外发射器信号,控制所述机械臂的关节角度,以使所述第一充电盘与所述第二充电盘对准并抵接,并使所述锂电池通过所述发射线圈及所述接收线圈的电磁感应对所述无人驾驶船舶的电池进行充电。
23.进一步地,所述充电机构还包括引导件,所述引导件为内部中空并两端开口的漏斗形结构,所述引导件的窄端罩设在所述第二充电盘上,所述第一充电盘的外周壁与所述引导件的内壁倾斜度相同,且所述第一充电盘的外周壁固定设置有万向球座。
24.进一步地,所述充电机构包括固定装置,所述固定装置包括固定盖、第二电动伸缩杆及卡扣,所述第一充电盘通过连接杆与所述机械臂固定连接,所述固定盖固定套设在所述连接杆上,所述第二电动伸缩杆固定设置在所述固定盖上,且所述第二电动伸缩杆与所述控制器电连接,所述卡扣与所述第二电动伸缩杆固定连接;
25.所述引导件宽端周壁固定设置有锁定沿,所述第一充电盘与所述第二充电盘对准
并抵接使,所述固定盖与所述锁定沿抵接,通过调整所述第二电动伸缩杆的伸缩量,所述卡扣能够与所述锁定沿扣合。
26.本实用新型的有益效果是:
27.1.由于主浮筒的四个第一连接件位于不同的平面并沿高度方向相间设置,拼接浮筒四个第二连接件位于不同的平面并沿高度方向相间设置,使得拼接浮筒的侧面与主浮筒的侧面对准时,对应的第二连接件及对应的第一连接件能够相互交错,使得连接螺钉能够穿过第二螺纹孔及第一螺纹孔,以实现拼接浮筒与主浮筒的拼接,同时两拼接浮筒的侧面相互对准并抵接时,对应的第二连接件能够相互交错,使得连接螺钉能够穿过第二螺纹孔,以实现拼接浮筒之间的相互拼接,在连接螺钉的作用下,能够将主浮筒及若干数量的拼接浮筒拼接出具有停泊口的浮台,而且根据无人驾驶船舶的体积选择合适数量的拼接浮筒,能够使浮台对无人驾驶船舶的三面进行包围,以对无人驾驶船舶进行保护,避免受到风浪等不利因素的影响而导致无人驾驶船舶出现侧翻;通过推进器能够对主浮筒进行驱动,同时带动浮台移动,能够根据需求使无人驾驶船舶的停泊在合适的位置,以便于对无人驾驶船舶进行维护、充电、装载、卸载等工作。
28.2.在有缓冲弹簧的弹力作用下,能够为连接螺钉与第一连接件及第二连接件提供的缓冲力,防止浮台在晃动时,连接螺钉出现松动,提高了主浮筒与拼接浮筒拼接及拼接浮筒之间拼接的牢固性。
29.3.在控制器的作用下,能够根据红外接收器所获得的红外发射器信号,确定第一充电盘与第二充电盘之间的位置,控制器根据红外接收器的信号控制控制机械臂的关节角度,使得第一充电盘与第二充电盘对准并抵接,并且利用电磁感应原理,锂电池通过发射线圈及接收线圈对无人驾驶船舶的电池进行充电。使得无人驾驶船舶在电量不足时,能够返回至对应的浮台进行充电,无需人工前往码头充电。
附图说明
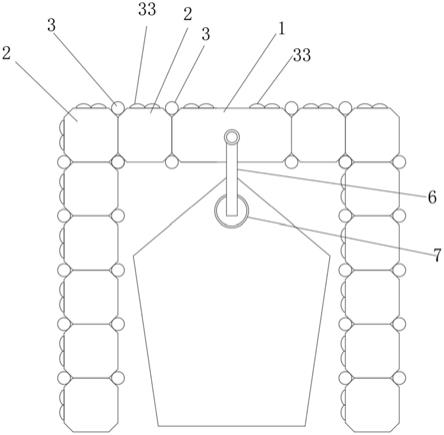
30.图1是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的结构示意图。
31.图2是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的连接螺钉结构示意图。
32.图3是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的限位件结构示意图。
33.图4是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的主浮筒结构示意图。
34.图5是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的调节机构结构示意图。
35.图6是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的充电机构结构示意图。
36.图7是本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头的固定盖结构示意图。
37.图中,1
‑
主浮筒,101
‑
电池仓,102
‑
锂电池,103
‑
调节仓,11
‑
第一连接件,12
‑
第一
螺纹孔,2
‑
拼接浮筒,21
‑
第二连接件,22
‑
第二螺纹孔,3
‑
连接螺钉,31
‑
缓冲弹簧,32
‑
限位槽,33
‑
限位件,4
‑
推进器,41
‑
限位件,411
‑
连接轴,412
‑
密封轴承,42
‑
驱动电机,43
‑
桨叶,5
‑
调节齿盘,51
‑
调节杆,511
‑
齿条,52
‑
第一电动伸缩杆,6
‑
机械臂,61
‑
第一充电盘,611
‑
发射线圈,612
‑
红外接收器,62
‑
第二充电盘,621
‑
接收线圈,622
‑
红外发射器,7
‑
引导件,71
‑
万向球座,8
‑
固定盖,81
‑
第二电动伸缩杆,82
‑
卡扣,83
‑
锁定沿。
具体实施方式
38.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
40.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
41.请同时参见图1至图7,本实用新型一较佳实施方式的保护小型无人驾驶船舶的自动码头,包括主浮筒1、拼接浮筒2、连接螺钉3及充电机构。
42.主浮筒1包括底部设有的两侧分别设有推进器4,主浮筒1内设有电池仓101,电池仓101设有锂电池102,锂电池102与推进器4电连接,以使推进器4驱动主浮筒1移动。本实施例的电池仓101可设置防水的开关门,以对锂电池102进行更换。
43.主浮筒1横截面为矩形结构,主浮筒1四个侧边分别设有第一连接件11,四个第一连接件11位于不同的平面,且四第一连接件11沿高度方向相间设置,第一连接件11贯穿设有第一螺纹孔12;
44.拼接浮筒2横截面为正方形结构,拼接浮筒2四个侧边分别设有第一连接件21,四个第二连接件21位于不同的平面,且四第二连接件21沿高度方向相间设置,第二连接件21贯穿设有第二螺纹孔22;
45.主浮筒1的侧面与拼接浮筒2的侧面对准并抵接时,主浮筒1与拼接浮筒2相对一侧的第一螺纹孔12及第二螺纹孔22相互对准,连接螺钉3能够与第一螺纹孔12及第二螺纹孔22螺纹连接,以使主浮筒1与拼接浮筒2进行拼接。本实施例的主浮筒1及拼接浮筒2四侧边均设有缺口,以便于将第一连接件11或第二连接件21稳定安装在对应的主浮筒1或拼接浮筒2上。
46.两拼接浮筒2的侧面相互对准并抵接时,两拼接浮筒2相对一侧的第二螺纹孔22相互对准,连接螺钉3能够与两第二螺纹孔22螺纹连接,以使多个拼接浮筒2之间进行拼接。通过主浮筒1与拼接浮筒2及拼接浮筒2之间的拼接,能够构成具有停泊口的浮台,以使无人驾
驶船舶能够驶入停泊口内。
47.由于主浮筒1的四个第一连接件11位于不同的平面并沿高度方向相间设置,拼接浮筒2四个第二连接件21位于不同的平面并沿高度方向相间设置,使得拼接浮筒2的侧面与主浮筒1的侧面对准时,对应的第二连接件21及对应的第一连接件11能够相互交错,使得连接螺钉3能够穿过第二螺纹孔22及第一螺纹孔12,以实现拼接浮筒2与主浮筒1的拼接,同时两拼接浮筒2的侧面相互对准并抵接时,对应的第二连接件21能够相互交错,使得连接螺钉3能够穿过第二螺纹孔22,以实现拼接浮筒2之间的相互拼接,在连接螺钉3的作用下,能够将主浮筒1及若干数量的拼接浮筒2拼接出具有停泊口的浮台。
48.而且根据无人驾驶船舶的体积选择合适数量的拼接浮筒2,能够使浮台对无人驾驶船舶的三面进行包围,以对无人驾驶船舶进行保护,避免受到风浪等不利因素的影响而导致无人驾驶船舶出现侧翻;通过推进器4能够对主浮筒1进行驱动,同时带动浮台移动,能够根据需求使无人驾驶船舶的停泊在合适的位置,以便于对无人驾驶船舶进行维护、充电、装载、卸载等工作。
49.如图2所示,本实施例中连接螺钉3套设有缓冲弹簧31,缓冲弹簧31一端与连接螺钉3抵接,另一端与第一连接件11或第二连接件21抵接。在有缓冲弹簧31的弹力作用下,能够为连接螺钉3与第一连接件11及第二连接件21提供的缓冲力,防止浮台在晃动时,连接螺钉3出现松动,提高了主浮筒1与拼接浮筒2拼接及拼接浮筒2之间拼接的牢固性。
50.如图3所示,主浮筒1及拼接浮筒2的侧面设有限位槽32及限位件33,主浮筒1的限位槽32分别凹设于主浮筒1相邻的两侧面上,主浮筒1的限位件33与主浮筒1的限位槽32相对设置,且主浮筒1的限位件33与主浮筒1固定连接;
51.拼接浮筒2的限位槽32分别凹设于拼接浮筒2相邻的两侧面上,拼接浮筒2的限位件33与拼接浮筒2的限位槽32相对设置,且拼接浮筒2的限位件33与拼接浮筒2固定连接;主浮筒1与拼接浮筒2拼接时或拼接浮筒2之间相互拼接时,不同侧面的限位槽32及限位件33相互卡接。
52.在限位槽32及限位件33的作用下,能够使浮台能够保持平整,防止主浮筒1、拼接浮筒2的拼接处出现错位。
53.如图3和图4所示,推进器4包括固定座41、驱动电机42及桨叶43,固定座41与主浮筒1的底部连接,驱动电机42与固定座41固定连接,且桨叶43与驱动电机42的驱动轴传动连接,驱动电机42与锂电池102电连接。在驱动电机42的带动,桨叶43转动以使浮台能够前进或后退。
54.主浮筒1内设有调节仓103,调节仓103位于电池仓101靠近固定座41的一端。
55.固定座41固定设置有连接轴411,连接轴411穿入调节仓103内,连接轴411套设有密封轴承412,且密封轴承412与主浮筒1转动连接。
56.调节仓103内设有调节机构,调节机构包括调节齿盘5、调节杆51及第一电动伸缩杆52。
57.调节齿盘5与连接轴411位于调节仓103内的一端固定连接,调节杆51与主浮筒1滑动连接,且调节杆51的一侧设有与调节齿盘5啮合的齿条511,第一电动伸缩杆52与主浮筒1固定连接,且第一电动伸缩杆52与调节杆51固定连接,第一电动伸缩杆52与锂电池102电连接,第一电动伸缩杆52驱动调节杆51移动,以使调节杆51带动调节齿盘5转动。本实施例的
调节仓103内设有连接座,连接座设有滚球,调节杆51穿入连接座并与滚球滑动,以使调节杆51与主浮筒1滑动连接。
58.在第一电动伸缩杆52的伸缩作用下,驱动调节杆51移动,由于齿条511与调节齿盘5啮合,使得调节杆51能够带动连接轴411转动,以调整固定座41的角度,从而实现了浮台的转向操作。
59.如图6所示,充电机构包括机械臂6、第一充电盘61、第二充电盘62及控制器。
60.机械臂6一端与主浮筒1的端面连接,另一端与第一充电盘61的一面连接,第一充电盘61远离机械臂6的一面嵌设有发射线圈611及红外接收器612;
61.第二充电盘62设有在无人驾驶船舶上,且第二充电盘62的上表面嵌设有接收线圈621及红外发射器622,接收线圈621与无人驾驶船舶的电池电连接;
62.控制器分别与机械臂6及红外接收器612电连接,控制器根据红外接收器612获得的红外发射器622信号,控制机械臂6的关节角度,以使第一充电盘61与第二充电盘62对准并抵接,并使锂电池102通过发射线圈611及接收线圈621的电磁感应对无人驾驶船舶的电池进行充电。
63.在控制器的作用下,能够根据红外接收器612所获得的红外发射器622信号,确定第一充电盘61与第二充电盘62之间的位置,控制器根据红外接收器612的信号控制控制机械臂6的关节角度,使得第一充电盘61与第二充电盘62对准并抵接,并且利用电磁感应原理,锂电池102通过发射线圈611及接收线圈621对无人驾驶船舶的电池进行充电。使得无人驾驶船舶在电量不足时,能够返回至对应的浮台进行充电,无需人工前往码头充电。
64.在控制器的作用下,能够根据红外接收器612所获得的红外发射器622信号,确定第一充电盘61与第二充电盘62之间的位置,控制器根据红外接收器612的信号控制控制机械臂6的关节角度,使得第一充电盘61与第二充电盘62对准并抵接,并且利用电磁感应原理,锂电池102通过发射线圈611及接收线圈621对无人驾驶船舶的电池进行充电。使得无人驾驶船舶在电量不足时,能够返回至对应的浮台进行充电,无需人工前往码头充电。
65.本实施例中,充电机构还包括引导件7,引导件7为内部中空并两端开口的漏斗形结构,引导件7的窄端罩设在第二充电盘62上,第一充电盘61的外周壁与引导件7的内壁倾斜度相同,且第一充电盘61的外周壁固定设置有万向球座71。
66.当第一充电盘61靠近第二充电盘62时,万向球座71能够沿着引导件7内壁滑动,使得第一充电盘61能够准确地与第二充电盘62对准,降低了机械臂6所需进行精度要求。本实施例的机械臂6具有三个关节,其结构为现有技术,本文不重复描述。
67.如图7所示,充电机构包括固定装置,固定装置包括固定盖8、第二电动伸缩杆81及卡扣82,第一充电盘61通过连接杆801与机械臂6固定连接,固定盖8固定套设在连接杆801上,第二电动伸缩杆81固定设置在固定盖8上,且第二电动伸缩杆81与控制器电连接,卡扣82与第二电动伸缩杆81固定连接。本实施例的第二电动伸缩杆81及卡扣82分别设置设有两个,且两第二电动伸缩杆81相对设置,卡扣82也相对设置。
68.引导件7宽端周壁固定设置有锁定沿83,第一充电盘61与第二充电盘62对准并抵接使,固定盖8与锁定沿83抵接,通过调整第二电动伸缩杆81的伸缩量,卡扣82能够与锁定沿83扣合。
69.由于无人驾驶船舶及浮台在水上会晃动,使得第一充电盘61与第二充电盘62容易
出现偏离,从而导致无法为无人驾驶船舶进行充电。本实施例中,当控制器首次获得正在充电的信号时,证明第一充电盘61与第二充电盘62对准并抵接,同时固定盖8盖设在引导件7宽端,通过控制器控制第二电动伸缩杆81缩短,卡扣82与锁定沿83扣合,使得第一充电盘61固定在第二充电盘62,防止在充电过程中,第一充电盘6与第二充电盘62意外分离。当不需充电或充电完毕后,控制器控制第二电动伸缩杆81伸长,卡扣82离开锁定沿83,使得机械臂6能够恢复至原位置。
70.本实施例中,主浮筒1设有无线自动应答装置,实现了通过中控室对主浮筒1进行远程控制及监控。而且无线自动应答装置能够与对应的无人驾驶船舶控制系统进行匹配,使得中控室能够通过无线自动应答装置对无人驾驶船舶进行监控。
71.本实施例中,当无人驾驶船舶没有足够电量回到码头时,可控制浮台移动至无人驾驶船舶,并且使停泊口嵌入无人驾驶船舶内,利用主浮筒1的推进器4及调节机构能够将无人驾驶船舶推回岸边,或通过充电机构对无人驾驶船舶进行充电。
72.使用本实施例的保护小型无人驾驶船舶的自动码头时,根据无人驾驶船舶的形状大小,选择合适数量的拼接浮筒2,按照无人驾驶船舶的形状将主浮筒1、拼接浮筒2进行拼接,通过连接螺钉3螺纹穿过对应的第二螺纹孔22或对应的第一螺纹孔12,将主浮筒1、拼接浮筒2拼接成具有停泊口的浮台,以使无人驾驶船舶能够停泊在停泊口。
73.当需要对无人驾驶船舶进行充电时,控制器根据红外接收器612所获得的红外发射器622信号,确定第一充电盘61与第二充电盘62之间的位置,控制器根据红外接收器612的信号控制控制机械臂6的关节角度,使得第一充电盘61向第二充电盘62靠近,万向球座71能够沿着引导件7内壁滑动,便于第一充电盘61准确地与第二充电盘62对准,锂电池102通过发射线圈611及接收线圈621对无人驾驶船舶的电池进行充电。
74.当控制器首次获得正在充电的信号时,同时固定盖8盖设在引导件7宽端,通过控制器控制第二电动伸缩杆81缩短,卡扣82与锁定沿83扣合,使得第一充电盘61固定在第二充电盘62;第一充电盘6与第二充电盘62意外分离。当不需充电或充电完毕后,控制器控制第二电动伸缩杆81伸长,卡扣82离开锁定沿83,机械臂6恢复至原位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1