一种水下机器人耐防撞机构的制作方法
1.本实用新型涉及水下机器人技术领域,尤其涉及一种水下机器人耐防撞机构。
背景技术:
2.随着科学技术的发展及社会时代的进步,水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,而水下机器人在水下作业时,容易出现碰撞现象,导致水下机器人损坏,因此通过会在水下机器人的外侧加装耐防撞机构,以保证水下机器人的安全。
3.现有水下机器人耐防撞机构,通常是在水下机器人外侧加装防撞支架进行保护,当水下机器人与物体发生碰撞时,防撞机构会与被碰撞物体摩擦,从而影响水下机器人的正常航行。
4.因此,有必要提供一种新的水下机器人耐防撞机构解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本实用新型提供一种减小碰撞时冲击力的水下机器人耐防撞机构。
6.本实用新型提供的水下机器人耐防撞机构包括:水下机器人主体;前防撞机构,所述前防撞机构安装于水下机器人主体前端;侧防撞机构,所述侧防撞机构设置于水下机器人主体外侧。
7.优选的,所述侧防撞机构包括外壳体,所述水下机器人主体外侧安装有外壳体,所述外壳体中部可拆卸连接有滑动组件。
8.优选的,所述滑动组件包括滚轮,所述外壳体中部设置有滚轮,所述滚轮外侧固定粘接有橡胶套,所述外壳体中部通过安装孔滑动连接有滚轮轴,所述滚轮轴端部一体成型有螺纹端头,所述螺纹端头与安装孔的内螺纹螺纹连接,所述滚轮与滚轮轴转动连接。
9.优选的,所述侧防撞机构还包括分隔板,所述外壳体中部固定焊接有分隔板,所述分隔板下侧弹性活动连接有支撑底板,所述支撑底板底部固定粘接有减震垫,所述支撑底板外侧固定连接有密封套,所述密封套另一端与外壳体固定连接。
10.优选的,所述支撑底板远离减震垫的一侧固定焊接有伸缩套杆,所述伸缩套杆外侧套设有弹簧,所述伸缩套杆远离支撑底板的一端通过螺栓与分隔板固定连接。
11.优选的,所述支撑底板中部开设有多个通槽,且通槽内滑动连接有固定锁条,所述固定锁条与水下机器人主体固定连接。
12.优选的,所述前防撞机构包括连接座,所述水下机器人主体前端固定连接有连接座,所述连接座前侧连接有多个减震柱,所述减震柱远离连接座的一侧连接有防撞环。
13.与相关技术相比较,本实用新型提供的水下机器人耐防撞机构具有如下有益效果:
14.1、本实用新型通过在侧防撞机构中增设滑动组件,提高侧防撞机构表面的滑动
性,减少其碰撞时的冲击力,避免了水下机器人主体因侧部碰撞后而卡住,从而保证水下机器人主体在侧部发生碰撞后任能顺利的通过,并结合弹簧的作用,对侧防撞机构碰撞产生的外力进行缓冲。
15.2、本实用新型通过分隔板的设置,并结合密封套的连接,使外壳体底部形成一个密闭的空间,以保证其内部的防水性,较好的保护了伸缩套杆和弹簧等部件,避免了外壳体内部的锈蚀而影响侧防撞机构整体的减震效果。
附图说明
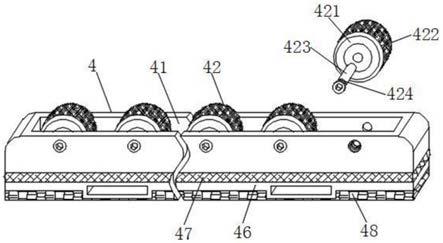
16.图1为本实用新型提供的水下机器人耐防撞机构的一种较佳实施例的结构示意图;
17.图2为图1所示的侧防撞机构三维的结构示意图;
18.图3为图1所示的侧防撞机构剖视的结构示意图;
19.图4为图1所示的前防撞机构的三维结构示意图。
20.图中标号:1、水下机器人主体;2、前防撞机构;21、连接座;22、减震柱;23、防撞环;3、固定锁条;4、侧防撞机构;41、外壳体;42、滑动组件;421、滚轮;422、橡胶套;423、滚轮轴;424、螺纹端头;43、分隔板;44、伸缩套杆;45、弹簧;46、支撑底板;47、密封套;48、减震垫。
具体实施方式
21.下面结合附图和实施方式对本实用新型作进一步说明。
22.请结合参阅图1至图4,一种水下机器人耐防撞机构包括:水下机器人主体1;前防撞机构2,前防撞机构2安装于水下机器人主体1前端;侧防撞机构4,侧防撞机构4设置于水下机器人主体1外侧。
23.需要说明:在水下机器人主体1前端安装前防撞机构2,以提高水下机器人主体1前部的耐防撞能力,在水下机器人主体1外侧安装多个侧防撞机构4,用来保护其外侧,以减少其外侧因碰撞造成的损坏。
24.参考图2所示,侧防撞机构4包括外壳体41,水下机器人主体1外侧安装有外壳体41,外壳体41中部可拆卸连接有滑动组件42,滑动组件42包括滚轮421,外壳体41中部设置有滚轮421,滚轮421外侧固定粘接有橡胶套422,外壳体41中部通过安装孔滑动连接有滚轮轴423,滚轮轴423端部一体成型有螺纹端头424,螺纹端头424与安装孔的内螺纹螺纹连接,滚轮421与滚轮轴423转动连接。
25.需要说明:滚轮421通过滚轮轴423安装在外壳体41中部,且滚轮421 设置有多个,通过橡胶套422与滚轮421的粘接,提高了滚轮421外侧的韧性,提升了其防撞能力,同时滚轮轴423通过其端部的螺纹端头424与外壳体41之间可拆卸连接,从而方便了后期对滚轮421的维护与更换;
26.还需要说明:通过在侧防撞机构4中增设滑动组件42,提高侧防撞机构 4表面的滑动性,避免了水下机器人主体1因侧部碰撞后而卡住,从而保证水下机器人主体1在侧部发生碰撞后任能顺利的通过。
27.参考图3,侧防撞机构4还包括分隔板43,外壳体41中部固定焊接有分隔板43,分隔板43下侧弹性活动连接有支撑底板46,支撑底板46底部固定粘接有减震垫48,支撑底板46
外侧固定连接有密封套47,密封套47另一端与外壳体41固定连接。
28.需要说明:分隔板43与外壳体41中部内侧固定焊接,通过分隔板43的设置,将滑动组件42分隔在外壳体41的上部,并结合密封套47的连接,使外壳体41底部形成一个密闭的空间,以保证其内部的防水性,较好的保护了伸缩套杆44和弹簧45等部件,避免了外壳体41内部的锈蚀而影响侧防撞机构4整体的减震效果;
29.还需要说明:减震垫48为合成橡胶制成,其具有较好的弹性,通过减震垫48与支撑底板46的粘接,不仅提高了该侧防撞机构4整体的减震效果,还能在其与水下机器人主体1连接时提高贴合度和连接后的稳固性。
30.参考图3所示,支撑底板46远离减震垫48的一侧固定焊接有伸缩套杆 44,伸缩套杆44外侧套设有弹簧45,伸缩套杆44远离支撑底板46的一端通过螺栓与分隔板43固定连接。
31.需要说明:在支撑底板46的侧面固定伸缩套杆44,然后将弹簧45套设在伸缩套杆44的外侧,再将外壳体41安装在伸缩套杆44另一端,并用螺栓固定,使用时,在弹簧45的弹性作用下,当外壳体41受到其它物体碰撞时,会使弹簧45压缩,对碰撞产生的外力进行缓冲,从而保证了该侧防撞机构4 的耐碰撞能力,并通过伸缩套杆44的连接,提高了外壳体41与支撑底板46 之间的稳定性,防止了外壳体41在碰撞后的偏移。
32.参考图1所示,支撑底板46中部开设有多个通槽,且通槽内滑动连接有固定锁条3,固定锁条3与水下机器人主体1固定连接。
33.需要说明:固定锁条3上设置有等间距分布的防滑凸条,用来增加与侧防撞机构4连接时的牢固性,安装时,可根据需要,将一个或多个侧防撞机构4套接在固定锁条3上,然后将固定锁条3套接在水下机器人主体1外侧,并锁住固定锁条3,从而使得一个或多个侧防撞机构4固定。
34.参考图4所示,前防撞机构2包括连接座21,水下机器人主体1前端固定连接有连接座21,连接座21前侧连接有多个减震柱22,减震柱22远离连接座21的一侧连接有防撞环23。
35.需要说明:减震柱22为弹性钢制成,当防撞环23受到碰撞时,减震柱 22受力发生弯曲形变,对防撞环23的冲击力进行有效的分解,从而提高了该前防撞机构2的耐防撞能力。
36.以上仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1