360的制作方法
360
°
全回转吊舱式水下电机船舶对转桨推进装置
技术领域:
1.本发明涉及机动船艇动力推进装置,特别涉及一种360
°
全回转舷内外双机吊舱式水下电机通过传动装置达到最高节能值的世界领先对转桨技术船舶推进装置。
2.1.根据80年前瑞典科学家发明对转桨,研发船舶对转桨推进装置30年共6条船测试航行15 年的实践及理论证明本发明节能值高达20%左右,航速和推进效率提高12%以上,适用任何功率任何类型船艇,特别适用军用船艇。
3.2.水下电机的电源可用船用发电机组或磁力发电,铅酸电池,磷酸铁锂电池,镍氢电池,超级电容,太阳能等,水下电机采用交流永磁变频调速或直流永磁无刷调速电机,电线、电缆通过管子引到上部控制箱,增设滑环装置。
4.3.运用交叉学科基础理论重大创新成果,设计为船舶对转桨运作的创新传动装置,传动装置内三构件同时运作,以其速比,齿数比按全新基础理论,受力分析计算出两对转桨功率和扭距分担比例,结合流体力学桨距比理论使对转桨发挥最佳节能和效率,高效、节能、环保、降噪、降振、降成本,提高船舶破冰效果。
5.4.采用带编码器的特殊电机,减速机和减速齿轮实现桨舵回转体360
°
全回转,当一条船安装2台推进装置时,采用先进的智能控制理论实现360
°
全回转同步、不同步全程电子操控,使船舶原地回转调头灵活倒车比单桨快1.6-1.8倍,航行特别安全。采用保持航向稳定最小舵面积的流线型水下体和机翼型舵以360
°
全回转取代传统舵效功能,不设专门的舵。整体推进装置上支架与船体形成框架结构,承受对转桨推力和振动(很小)外当受外力冲击时由船体承受,保护推进装置免受损伤。
背景技术:
6.本发明前申请的发明专利“电动360
°
全回转舷内外双机对转桨推进装置”(专利号: zl201210003398.5)和“360
°
全回转舷内外双机对转桨推进装置整机结构型式(专利号: zl201922055798.0)其中360
°
全回转结构相似,而主推进装置比较复杂,虽采用对转桨形式,但因机械损失较大,节能值不是最高。
7.对本发明前申请的另外二项发明专利“电动船舶对转桨推进装置整体和艉管结构”(专利号:zl201510102332.5)和“船舶对转桨推进装置整机结构”(专利号:zl201721245143.4) 适用舷内布置的对转桨推进装置,其核心技术传动装置与本发明有类似之处,但增加离合器、艉轴、联轴器、水润滑密封装置、特殊轴承
……
等结构相对复杂,成本略高,但也在合理范围内。201510102332.5专利虽提到水下电机方案,但传动装置具体结构不明确,没提到推力轴承,不完整,360
°
全回转机构过于简单,仅适用于游艇。
技术实现要素:
8.1、本发明“360
°
全回转吊舱式水下电机船舶对转桨推进装置”包括固定在船艉部的桨舵回转体,回转体中包括水下电机驱动传动装置和对转桨的第一传动链,驱动桨舵回转体回转部分的第二传动链。
9.2、本发明的实践依据是合计6条不同类型船舶安装对转桨推进装置长达15年与单螺旋桨进行对比测试和航行得出的对转桨大量节能(15%左右)提高推进效率和航速10%以上,有船检证书,有二条电力推进船,其中一条360
°
全回转推进经ccs审图批准,对转桨ccs产品证书,另一条1*27.5kw舷内电动对转桨推进装置于2014年11月在中船重工708研究所拖拽水池内进行系泊拉力试验,拉力设计指标372kg,实测当42hz时拉力408kg,推力增加10%以上,超过设计指标,当采用额定hz=50时推力测试增加更高,2015年安装在16米长游艇上测得对转桨总效率65%,航速14km/h以上,倒车快,航行安全。因此这是经得起历史检验的重大科技成果。
10.根据上述基础可以证明本发明节能值达到20%左右,航速和推进效率提高12%以上。
11.3、本发明水下电机电源可以是船用发电机组或磁力发电,铅酸电池,磷酸铁锂电池、镍氢电池或其他电池,超级电容,太阳能等可再生清洁能源,实现最优化用电模式。水下电机采用交流永磁变频调速或直流永磁无刷调速电机,电线电缆从水下通过管子引到上部控制箱,并增设滑环装置。(可放在水下电机处)
12.4、本发明-核心技术是采用带编码器的专用电机、减速机和减速齿轮实现桨舵回转体 360
°
全回转,当一条船安装2台推进装置时采用基于模糊算法和神经网络算法的先进的智能控制理论通过ccs型式认可和国家试验宝电磁兼容试验和环境试验,工艺水平达国内先进使船舶原地回转,调头灵活,船舶航行在任意方向都能达到最大推力,最大节能值。360
°
全回转同步、不同步全程电子操控,无论是船舶开航、转弯、调头、离靠码头,倒车都可实现快捷、安全可靠的操纵模式,尤其是倒车可采用在平面内旋转180
°
开顺车来实现,倒车速度比传统单桨反转倒车快1.6-1.8倍,航行特别安全。
13.5、为减少阻力,操舵扭矩,减轻重量传动装置及水下电机外壳呈流线型,上部舵叶呈机翼型、表面抛光、清楚、美观、平滑,边缘整齐;采用优质材料,重量轻、耐蚀、耐腐、强度高;轴承采用skf和德国ina质量最好。推进装置支架采用框架结构,既有结构紧凑,新颖、重量轻、拆装方便,可靠、成本低,其推进力和振动(对转桨振动大部分平衡)力以及撞击力原来由支架承受改由船体承受,可有效保护推进装置免受损伤。理论计算使流体产生操舵扭矩最小,从而使360
°
全回转机构功率最小。
14.6、本发明最重大的核心技术是运用交叉学科基础理论重大创新成果设计为船舶对转桨服务和运作的创新传动装置,它不仅结构简单,外壳圆柱形整个装置环绕轴中心零部件全部对称布置,离心力小,运转平衡,噪声、振动小,维修方便,成本低,用极其巧妙又简单方式使倒、顺车、降速,动力分流,两对转桨自动匹配一次性全部完成,任何工况下都使对转桨发挥最佳效能,和过载保护能力,甚至某桨打坏,另一桨能弥补其功率损失,继续安全航行。
15.传统的类似传动装置都是有三个构件,但一个构件固定,另二构件运转,而本发明传动装置三构件同时运转,其中二个构件分别连两个螺旋桨,在水中相反方向运转,其推力要在传动装置三构件、轴承和箱体承担,因此传统的单学科理论已无法确定本装置各种技术参数,包括传动比,构件圆周力,径向力,离心力,齿数比,作用在轴上的力,两对转桨扭矩、转速等,所以与对转桨连接的传动装置内构件和轴承的相应参数包括相对传动比、转速、受力情况、同心条件、装配条件、邻接条件
……
等都必须按交叉学科创新的基础理论做
支撑,具体说该特殊传动装置运用理论力学,材料力学,流体力学,机械原理,另件,现有机械设计手册4版3卷等交叉学科进行全系统受力分析,齿数配置,按两对转桨总扭矩,传动装置速比采用全新的基础理论才能计算出两对转桨的功率和扭矩分担比例并与传动装置中二个构件扭矩相匹配。除此而外两对转桨还要按照流体力学计算前桨诱导速度产生的损失位于后桨倾角中心线处全部由后桨吸收时的节能值和效率最高引出桨距比理论确定发挥最佳节能效应和推进效率的桨距比值。
16.本发明已把各种速比和齿数比下的两对转桨功率和扭矩分担比例以及经过模型制作经详细理论计算和长达15年航行实践总结出来的各种螺旋桨转速下桨距比值列成表格编入即将出版的“船舶对转桨推进装置图谱和计算资料汇编”方便设计人员查阅。
17.7、本发明除机械损失小,节能值最高外,结构上省略离合器,艉轴、联轴器、水润滑密封装置,特殊轴承
……
等,结构最简单,成本最低。
18.综上所述本发明是领先世界攻克了80年来一直无法解决的高效、节能、环保、降噪、降振、降成本舷内外船舶对转桨推进装置的世界难题。
附图说明:
19.下面结合附图详细描述本发明的实施例,以便更清楚了解本发明的目的,特点优点。
20.(1)图1是2012年发明专利“电动360
°
全回转舷内外双机对转桨推进装置”示意图;
21.(2)图2是2015年发明专利“电动船舶对转桨推进装置整体和艉管结构”示意图;
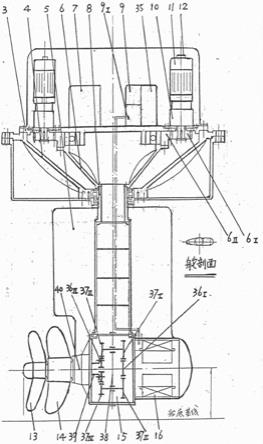
22.(3)图3是本发明“360
°
全回转吊舱式水下电机船舶对转桨推进装置”船艉部侧视示意图;
23.(4)图4是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”船艉部左视示意图;
24.(5)图5是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”船艉部俯视示意图;
25.(6)图6是“360
°
全回转吊舱式水下电机船舶对转桨推进装置
”‑
实施例侧视结构示意图;
26.(7)图7是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”另一实施例侧视结构示意图;
27.(8)图8是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”上述两实施例左视结构示意图;
28.(9)图9是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”安装2台船艉部俯视示意图;
29.(10)图10是“360
°
全回转吊舱式水下电机船舶对转桨推进装置”安装2台船艉部左视示意图。
具体实施方式:
30.参看图1详见“电动360
°
全回转舷内外双机对转桨推进装置”31.(发明专利号:zl201210003398.5)此处不作介绍。
32.参看图2详见“电动船舶对转桨推进装置整体和艉管结构”33.(发明专利号:zl201510102332.5)此处不作介绍。
34.参看图3本发明360
°
全回转吊舱式水下电机船舶对转桨推进装置包括:固定在船艉部1的桨舵回转体5,固定在船艉部壳体2上的圆锥形支架4,圆锥形支架4与其上部的圆形板底座 3螺接,在圆形板底座3下面安装360
°
全回转机构圆锥形转盘6小圆柱齿轮6i,大圆柱齿轮6ii和与圆锥形转盘6螺接的上舵承8,在圆形板底座3中间安装液压压力润滑系统7和电气控制系统,其中包括主电机控制系统9,滑环装置9i,360
°
全回转控制系统35,圆形板底座3的上部两侧各安装一台有编码器12的特殊电机11及减速器10。桨舵回转体5的机翼型舵与对转桨13、14和传动装置15以及水下电机16螺接。
35.参看图3、5、6、7所述360
°
全回转吊舱式水下电机船舶对转桨推进装置双机同步、不同步运行电子操纵驱动机构18包括与编码器12和特殊电机11连接的交流变频器22(直流为驱动器),plc17,主充放电箱23通过单电缆34通驾驶室触摸仪表视屏33及双机双桨操纵器 32(单机为32i)触摸仪表视屏33上安装有灯光,报警开关等按钮24,主电机电压、电流、转速显示26,液压系统温度显示25,360
°
全回转特殊电机电压,电流,转速显示27,360
°
操舵方向盘28,360
°
方位指示器29,电源电压显示30,报警显示31等,由360
°
全回转控制系统35控制,主充放电箱23除连接变频器22和plc外再连接船用照明、航行信号、无线电话、应急发电机组、混合动力电池组,因图中未画出在此不再详述。
36.参看图6所述360
°
全回转吊舱式水下电机船舶对转桨推进装置其水下部分传动装置15当速比在3∶1及以下时,水下电机16的输出轴36i即传动装置构件36i,与构件36i啮合的构件 37i,37ii,37iii、37iv,安装在37i、37ii、37iii、37iv轴上的构件38,与构件37iii, 37iv啮合的构件36ii,与36ii螺接的输出外轴39直接连前螺旋桨14,与构件38固定的输出内轴40直接连后螺旋桨13,三构件36、37、38同时运转,图中外轴39,内轴40设置推力轴承(图中未画出)。
37.参看图7所述360
°
全回转吊舱式水下电机船舶对转桨推进装置其水下部分传动装置15当速比3∶1-8∶1时,水下电动机16的输出轴36i即传动装置构件36i,与构件36i啮合的构件 37i和37ii,安装在37i、37ii轴上的构件37iii,与37i和37ii啮合的构件38,构件37 iii与输出外轴39固连直接连前螺旋桨14,构件38与输出内轴40固连再直接连后螺旋桨13,三构件36、37、38同时运转,图中外轴39,内轴40设置推力轴承(图中未画出)。
38.参看图6、7、8、9、10所述360
°
全回转吊舱式水下电机船舶对转桨推进装置安装2台推进装置的结构,其实施方式与一台推进装置大致相同,所不同的是同步运行电子操纵机构编程软件控制芯片和plc功能点数有所差异。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1