一种基于智能识别技术的智能侦察无人船的制作方法
1.本实用新型涉及无人船领域,具体是涉及一种基于智能识别技术的智能侦察无人船。
背景技术:
2.无人船或无人艇的研制,已经是国内外争相开辟的新领域,目前国内外对无人船航行控制都是基于惯导实现,搜索雷达作为避碰控制,光电系统作为跟踪侦察取证用途。但雷达只能探测到目标的方位、距离、航速等信息,无法识别出目标类型,存在虚警情况,特别是侦察类无人船,没有人远程控制的话,无法获取目标足够特征信息。
3.也有些地方的无人船船侦察利用人工远程遥控,根据光电及雷达信息执行侦察任务,需要人工实时操控船只与光电,在一定程度上实现监控警戒功能,但是,在工作流程与系统功能上尚未做到有机结合,颇耗人力,尚未做到雷达、惯导与光学设备在探测、避碰、识别及侦察功能上的相互弥补。
4.目前的无人船光电系统缺乏对海域目标的智能化自动跟踪识别功能,雷达扫描到目标后,无法自动判断出是否为虚警,是否为关注目标,是否需要避碰,需人工干预控制光电观察,通过人眼识别,因而无法实现智能化的跟踪侦察及航行避碰。
技术实现要素:
5.为解决上述技术问题,提供一种基于智能识别技术的智能侦察无人船,本技术方案解决了上述背景技术中提出的目前的无人船光电系统缺乏对海域目标的智能化自动跟踪识别功能,雷达扫描到目标后,无法自动判断出是否为虚警,是否为关注目标,是否需要避碰,需人工干预控制光电观察,通过人眼识别,因而无法实现智能化的跟踪侦察及航行避碰的问题。
6.为达到以上目的,本实用新型采用的技术方案为:
7.一种基于智能识别技术的智能侦察无人船,包括船体,所述船体上端前侧固定安装有船载雷达,所述船体上端固定安装有无线数据模块,所述船体上端在无线数据模块后侧固定连接有光电安装板,所述光电安装板上端固定安装有光电指向系统,所述船体上端中部设置有控制模块,所述船体上端后部设置有电源,所述船体后端固定安装有驱动装置,所述船体下端设置有配重稳定机构。
8.优选的,所述光电指向系统包括伺服转向装置,所述伺服转向装置上固定安装有红外传感器、可见光传感器和探照灯。
9.优选的,所述伺服转向装置包括底部旋转电机,所述底部旋转电机输出端固定连接有底部旋转板,所述底部旋转板上端通过连接柱固定连接有顶部旋转板,所述底部旋转板和顶部旋转板组成的容置空间内设置有角度调整电机,所述角度调整电机输出端固定连接有角度调整杆,所述顶部旋转板中部贯穿开设有矩形通孔,所述角度调整杆穿过矩形通孔,所述角度调整杆穿过矩形通孔的一端固定连接有安装板,所述红外传感器、可见光传感
器和探照灯固定安装于安装板上端。
10.优选的,所述配重稳定机构包括收卷电机和支撑板,所述收卷电机通过电机座固定安装于船体内部,所述支撑板固定连接于船体内部,所述收卷电机输出端通过联轴器固定连接有收卷辊,所述收卷辊远离收卷电机的一端与支撑板转动连接,所述收卷辊周表面设置有绳索,所述绳索一端穿过船体并延伸至船体下方,所述绳索延伸至船体下方的一端固定连接有配重块。
11.优选的,所述控制模块包括综合控制系统、智能识别系统、惯导系统和船控系统,所述光电指向系统与智能识别系统电性连接,所述综合控制系统与光电指向系统、船载雷达、惯导系统和船控系统电性连接。
12.优选的,所述控制模块与无线数据模块电性连接。
13.与现有技术相比,本实用新型的优点在于:
14.本实用新型采用智能识别系统,在进行无人侦察任务时,船载雷达扫描搜索海面目标,当发现可疑对象时,由综合控制系统控制光电指向系统对进行追踪图像捕捉,同时智能识别系统对光电指向系统采集到的图像信息进行智能识别,并将识别结果反馈至综合控制系统中,综合控制系统根据识别结果,控制控系统,进行航行避碰决断,同时将识别结果通过无线数据模块发送至远程控制中心,整体识别追踪过程不需人工参与,实现智能化的跟踪侦察及航行避碰。
附图说明
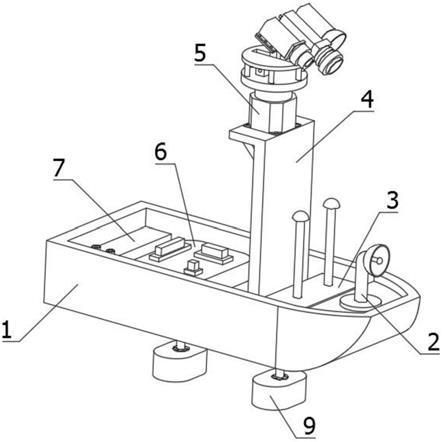
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型另一视角下的立体结构示意图;
17.图3为本实用新型中的配重稳定机构的立体结构示意图;
18.图4为本实用新型的光电指向系统的立体结构示意图;
19.图5为本实用新型的光电指向系统另一视角下的立体结构示意图;
20.图6为本实用新型的电路框图。
21.图中标号为:
22.1、船体;2、船载雷达;3、无线数据模块;4、光电安装板;5、光电指向系统;501、底部旋转电机;502、底部旋转板;503、连接柱;504、顶部旋转板;5041、矩形通孔;505、角度调整电机;506、角度调整杆;507、可见光传感器; 508、探照灯;509、红外传感器;510、安装板;6、控制模块;7、电源;8、驱动装置;9、配重稳定机构;901、收卷电机;902、电机座;903、联轴器;904、收卷辊;905、支撑板;906、绳索;907、配重块。
具体实施方式
23.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
24.请参阅图1-5所示,一种基于智能识别技术的智能侦察无人船,包括船体1,船体1上端前侧固定安装有船载雷达2,船体1上端固定安装有无线数据模块3,船体1上端在无线数据模块3后侧固定连接有光电安装板4,光电安装板4上端固定安装有光电指向系统5,船体1上端中部设置有控制模块6,船体1上端后部设置有电源7,船体1后端固定安装有驱动装
置8,船体1下端设置有配重稳定机构9,控制模块6包括综合控制系统、智能识别系统、惯导系统和船控系统,光电指向系统5与智能识别系统电性连接,综合控制系统与光电指向系统5、船载雷达2、惯导系统和船控系统电性连接,控制模块6与无线数据模块3电性连接,在进行无人侦察任务时,船载雷达2扫描搜索海面目标,当发现可疑对象时,由综合控制系统控制光电指向系统5对进行追踪图像捕捉,同时智能识别系统对光电指向系统5采集到的图像信息进行智能识别,并将识别结果反馈至综合控制系统中,综合控制系统根据识别结果,控制船控系统,进行航行避碰决断,同时将识别结果通过无线数据模块3发送至远程控制中心,整体识别追踪过程不需人工参与,实现智能化的跟踪侦察及航行避碰。
25.光电指向系统5包括伺服转向装置,伺服转向装置上固定安装有红外传感器509、可见光传感器507和探照灯508,伺服转向装置包括底部旋转电机501,底部旋转电机501输出端固定连接有底部旋转板502,底部旋转板502上端通过连接柱503固定连接有顶部旋转板504,底部旋转板502和顶部旋转板504组成的容置空间内设置有角度调整电机505,角度调整电机505输出端固定连接有角度调整杆506,顶部旋转板504中部贯穿开设有矩形通孔5041,角度调整杆506 穿过矩形通孔5041,角度调整杆506穿过矩形通孔5041的一端固定连接有安装板510,红外传感器509、可见光传感器507和探照灯508固定安装于安装板510 上端,光电指向系统中配备可见光传感器507用于进行实时拍摄成像,红外传感器509用于进行红外成像,探照灯508用于进行补光,便于可见光传感器507 采集更加清晰的图像,伺服转向装置中设置有底部旋转电机501和角度调整电机 505对红外传感器509、可见光传感器507和探照灯508的指向进行调整,可对水面进行全方位指向追踪。
26.配重稳定机构9包括收卷电机901和支撑板905,收卷电机901通过电机座902固定安装于船体1内部,支撑板905固定连接于船体1内部,收卷电机901 输出端通过联轴器903固定连接有收卷辊904,收卷辊904远离收卷电机901的一端与支撑板905转动连接,收卷辊904周表面设置有绳索906,绳索906一端穿过船体1并延伸至船体1下方,绳索906延伸至船体1下方的一端固定连接有配重块907,配重稳定机构9可根据无人船航行需求收放配重块907,当进行追踪识别时,收卷电机901带动收卷辊904转动放下配重块907稳定船体,使光电指向系统5采集的图像更加清晰。
27.本实用新型的工作过程为:
28.目标搜索:无人船工作时,按照预先对目标海域规划的航行路线进行巡航,船载雷达2扫描搜索海面目标,发现目标后,船控系统构建海面态势目标分布图,同时把发现的目标发送给综合控制系统;
29.目指运动:综合控制系统按接收到的新目标批号后,根据惯导感应到的船姿态角度,以及目标所在地理位置,计算出光电目指运动角度,控制光电指向系统 5进行目指运动,光电指向系统5到位后,综合控制系统发送到位指令给智能识别系统,同时切换到自稳定模式,等待智能识别系统的反馈信息;
30.图像识别:光电指向系统5将捕捉到的图像传送至智能识别系统,智能识别系统开始识别目标,图像中有目标的话,通过反馈的目标所在画面中的左上角与右下角位置或者相对视场中心的偏差量信息,告知综合控制系统、显控上位机和船控系统,超过6秒没有检测到有目标,则不反馈信息给综合控制系统;
31.目标跟踪:综合控制系统接收到识别信息后,控制光电指向系统5,根据目标所在
图像位置,切换到跟踪模式,开始持续跟踪目标,并根据目标在画面的占比大小调节光电指向系统5焦距,更细致的跟踪识别目标,完成侦查任务,同时智能识别系统将详细识别结果发送给船控系统,进行航行避碰决断,综合控制系统没收到目标识别则发出虚警信息,完成单次目标识别过程。
32.结果发送:综合控制系统将识别结果通过无线数据模块发送至远程控制中心。
33.综上所述,本实用新型的优点在于:集成船载雷达、光电跟踪系统、船载惯导系统、智能识别系统,可实现无人操作的无人船自动搜索、跟踪、识别、侦查取证及辅助避碰的智能化工作。
34.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1