1.本实用新型属于水下机器人领域,具体地说是涉及一种水下机器人。
背景技术:2.水下探索是21世纪的核心课题之一,而水下机器人则是水下探索的利器之一。目前市面上水下机器人也多为这种有缆遥控型无人潜航器,这种潜航器大大提高了人们水下探索的效率和安全性。但由于工艺和材料等等的限制,制造成本普遍较为高昂;并且由于目前市面上绝大部分工业级的水下机器人均是又大又重,而消费级水下机器人虽成本低、体积小,但可靠性较低、整体采用灌胶密封的方式(难以拆装改造)且软硬件资料均不开源,不利于人们学习了解水下机器人。因此需要一种低成本、高可靠性、小巧便捷、使用方便、容易拆装改造的水下机器人。
技术实现要素:3.本实用新型的目的的克服现有水下机器人的不足,提供一款低成本、高可靠性、小巧便捷、使用方便、容易拆装改造的教育级开源水下机器人。
4.为解决上述问题,本实用新型是通过以下技术方案实现:
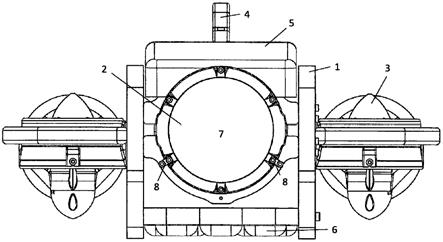
5.一种水下机器人,由框架1,密封控制舱2,水下推进器3,把手4,浮材5,配重块6,电器组件7,固定角件8组成。
6.其中框架1由侧板11,防撞侧板12,底板13,固定环14组成;其中侧板11整体为矩形方板,使用聚乙烯制成;防撞侧板12为开口状弧形,内部镂空,使用聚乙烯制成;防撞侧板12固定连接在侧板11中部位置;底板13整体为不规则片板结构,使用聚乙烯制成;固定环14整体为半圆弧形;侧板11设有两个,通过螺栓固定连接在底板13两侧上,防撞侧板12通过螺栓固定连接在侧板11上;固定环14设有四个,分别通过螺栓固定在侧板11上;其中两个固定环14开口向上,固定在侧板11底部;其余两个固定环14开口向下,固定连接在侧板11上部;
7.密封控制舱2由透明球形罩21,球形罩压环22,密封法兰环23,透明亚克力端盖24,空白穿线螺栓25,透明亚克力舱体26,通气螺栓27组成;透明球形罩21通过球形罩压环22固定连接在密封法兰环上,拧紧螺母,压迫密封圈紧压在密封法兰环23上,即可实现透明球形罩21安装处的端面密封;密封法兰环23的轴面凹槽处装上2个涂有硅脂的密封圈,将其压入透明亚克力舱体26中,通过压迫密封圈即可实现密封法兰环23轴面的密封;将涂有硅脂的密封圈置于通气螺栓27凹槽处,再将通气螺栓27穿过透明亚克力端盖24上预留的通孔,拧紧螺母,压迫密封圈紧压在透明亚克力端盖24上,即可实现通气螺栓27安装处的端面密封;空白穿线螺栓28的安装固定方式同通气螺栓27;通过螺母将透明亚克力端盖24固定在密封法兰环(端面凹槽内置有一个涂有硅脂的密封圈)上,拧紧螺母,压迫密封圈紧压在密封法兰环23上,即可实现透明亚克力端盖24安装处的端面密封;密封控制舱的密封主要采用挤压密封圈达到密封效果。
8.密封控制舱2通过固定角件8通过螺栓分别固定连接在密封控制舱2上的密封法兰
环23和框架1上的固定环14上,使密封控制舱2牢固在机器人本体中;
9.浮材5为聚氨酯材料制成,为机器人提供浮力;其整体为长方体,底面上开有与密封控制舱2形体相吻合的弧形缺口,便于贴合在密封控制舱2上,其上设有螺栓孔;浮材5位于密封控制舱2上;
10.通过把手4为c形铝件,用于搬运,其两端分别开设有螺栓孔;把手4位于浮材5上;
11.把手4、浮材5、固定环14三者通过螺栓固定连接在一起;
12.配重块6为铅块,通过螺栓固定在框架底部,可通过在底板上的不同位置安装不同数量的配置块来调节水下机器人在水中的浮力状态;
13.电器组件7固定安装在密封控制舱2内;
14.水下推进器3设有四个,其中两个固定安装在框架1尾部两侧,且螺旋桨朝向与机器人车身方向一致;其余两个水下推进器3固定安装在框架1中部两侧,并置于防撞侧板12中间镂空位,其螺旋桨朝向与机器人车身方向垂直;
15.水下推进器3的线缆穿过密封控制舱2的端盖,在接口处进行灌胶密封处理,线缆与电器组件7电连接;
16.本实用新型的电器组件7,由主控器71,嵌入式主机72,锂电池73,无刷电调74,水下开关75,充电接口76(带防水盖),深度传感器77,漏水传感器78,功率计79,网线80,相机云台81,摄像头82,继电器83,降压模块84组成;水下开关75、充电接口76(带防水盖)、深度传感器77、网线80的安装固定方式同通气螺栓27。网线主要用于连接计算机与水下机器人,进行数据通信,从而实现可在计算机端看到机器人摄像头82拍摄的实时画面,查看深度传感器77测得机器人所处位置的深度及温度,查看漏水传感器78是否检测到舱内漏水,查看功率计79测得的当前锂电池73的输出电压、输出电流及输出功率,以及查看主控器71板载传感器测得当前机器人的航行姿态及方向;降压模块84用于为主控器71的伺服通道以及嵌入式主机72提供5v供电;无刷电调74用于驱动水下推进器3;主控器71主要用于水下机器人的运动控制,为无刷电调74、相机云台81提供pwm输出;摄像头82安装在相机云台81上,可进行俯仰45
°
摆动;嵌入式主机72主要用于与上位机软件进行通信,传输摄像头实时画面、传感器数据及控制命令;继电器83、锂电池73和水下开关75配合实现方便安全的上电断电方式;充电接口76(带防水盖)用于对舱内锂电池73充电。
17.主控器控制垂向布置的水下推进器3,控制机器人上升或下潜;控制水平布置的水下推进器3,控制机器人前进或后退。
18.本实用新型做到每个部件之间的安装固定均采用螺栓螺母固定方式,易拆装,可供反复拆卸改装;结构简单成本低。
附图说明
19.图1是本实用新型总体的结构示意图。
20.图2是本实用新型总体结构的后视补充图。
21.图3是本实用新型框架1的结构示意图。
22.图4是本实用新型框架1的等轴测图。
23.图5是本实用新型密封控制舱2结构的剖面示意图。
24.图6是本实用新型密封控制舱2结构的后视补充图。
25.图7是本实用新型框架1与把手4和浮材5配合的剖面示意图。
26.图8是本实用新型整体的仰视结构示意图。
27.图9是本实用新型整体的俯视结构示意图。
28.图10是本实用新型电器组件7的连接示意图。
29.图11是本实用新型新型电器组件7的安装后视图。
30.图12是本实用新型使用的连接示意图。
31.图中,1-框架、2-密封控制舱、3-水下推进器、4-把手、5-浮材、6-配重块、7-控制系统、8-固定角件、11-侧板、12-防撞侧板、13-底板、14-固定环、21-透明球形罩、22-球形罩压环、23-密封法兰环、24-透明亚克力端盖、25-空白穿线螺、26-透明亚克力舱体、27-通气螺栓、71-主控器、72-嵌入式主机、73-锂电池、74-无刷电调、75-水下开关、76-充电接口(带防水盖)、77-深度传感器、78-漏水传感器、79-功率计、80-网线、81-相机云台、82-摄像头、83-继电器、84-降压模块。
具体实施方式
32.下面结合附图对本实用新型作进一步详细描述:
33.图1所示一种水下机器人,由框架1,密封控制舱2,水下推进器3,把手4,浮材5,配重块6,电器组件7,固定角件8组成。
34.其中框架1由侧板11,防撞侧板12,底板13,固定环14组成;其中侧板11整体为矩形方板,使用聚乙烯制成;防撞侧板12为开口状弧形,内部镂空,使用聚乙烯制成;防撞侧板12固定连接在侧板11中部位置;底板13整体为不规则片板结构,使用聚乙烯制成;固定环14整体为半圆弧形;侧板11设有两个,通过螺栓固定连接在底板13两侧上,防撞侧板12通过螺栓固定连接在侧板11上;固定环14设有四个,分别通过螺栓固定在侧板11上;其中两个固定环14开口向上,固定在侧板11底部;其余两个固定环14开口向下,固定连接在侧板11上部;
35.密封控制舱2由透明球形罩21,球形罩压环22,密封法兰环23,透明亚克力端盖24,空白穿线螺栓25,透明亚克力舱体26,通气螺栓27组成;透明球形罩21通过球形罩压环22固定连接在密封法兰环上,拧紧螺母,压迫密封圈紧压在密封法兰环23上,即可实现透明球形罩21安装处的端面密封;密封法兰环23的轴面凹槽处装上2个涂有硅脂的密封圈,将其压入透明亚克力舱体26中,通过压迫密封圈即可实现密封法兰环23轴面的密封;将涂有硅脂的密封圈置于通气螺栓27凹槽处,再将通气螺栓27穿过透明亚克力端盖24上预留的通孔,拧紧螺母,压迫密封圈紧压在透明亚克力端盖24上,即可实现通气螺栓27安装处的端面密封;空白穿线螺栓28的安装固定方式同通气螺栓27;通过螺母将透明亚克力端盖24固定在密封法兰环(端面凹槽内置有一个涂有硅脂的密封圈)上,拧紧螺母,压迫密封圈紧压在密封法兰环23上,即可实现透明亚克力端盖24安装处的端面密封;密封控制舱的密封主要采用挤压密封圈达到密封效果。
36.密封控制舱2通过固定角件8通过螺栓分别固定连接在密封控制舱2上的密封法兰环23和框架1上的固定环14上,使密封控制舱2牢固在机器人本体中;
37.浮材5为聚氨酯材料制成,为机器人提供浮力;其整体为长方体,底面上开有与密封控制舱2形体相吻合的弧形缺口,便于贴合在密封控制舱2上,其上设有螺栓孔;浮材5位于密封控制舱2上;
38.通过把手4为c形铝件,用于搬运,其两端分别开设有螺栓孔;把手4位于浮材5上;
39.把手4、浮材5、固定环14三者通过螺栓固定连接在一起;
40.配重块6为铅块,通过螺栓固定在框架底部,可通过在底板上的不同位置安装不同数量的配置块来调节水下机器人在水中的浮力状态;
41.电器组件7固定安装在密封控制舱2内;
42.水下推进器3设有四个,其中两个固定安装在框架1尾部两侧,且螺旋桨朝向与机器人车身方向一致;其余两个水下推进器3固定安装在框架1中部两侧,并置于防撞侧板12中间镂空位,其螺旋桨朝向与机器人车身方向垂直;
43.水下推进器3的线缆穿过密封控制舱2的端盖,在接口处进行灌胶密封处理,线缆与电器组件7电连接;
44.图4所示本实用新型的电器组件7,由主控器71,嵌入式主机72,锂电池73,无刷电调74,水下开关75,充电接口76(带防水盖),深度传感器77,漏水传感器78,功率计79,网线80,相机云台81,摄像头82,继电器83,降压模块84组成;水下开关75、充电接口76(带防水盖)、深度传感器77、网线80的安装固定方式同通气螺栓27。网线主要用于连接计算机与水下机器人,进行数据通信,从而实现可在计算机端看到机器人摄像头82拍摄的实时画面,查看深度传感器77测得机器人所处位置的深度及温度,查看漏水传感器78是否检测到舱内漏水,查看功率计79测得的当前锂电池73的输出电压、输出电流及输出功率,以及查看主控器71板载传感器测得当前机器人的航行姿态及方向;降压模块84用于为主控器71的伺服通道以及嵌入式主机72提供5v供电;无刷电调74用于驱动水下推进器3;主控器71主要用于水下机器人的运动控制,为无刷电调74、相机云台81提供pwm输出;摄像头82安装在相机云台81上,可进行俯仰45
°
摆动;嵌入式主机72主要用于与上位机软件进行通信,传输摄像头实时画面、传感器数据及控制命令;继电器83、锂电池73和水下开关75配合实现方便安全的上电断电方式;充电接口76(带防水盖)用于对舱内锂电池73充电。
45.主控器控制垂向布置的水下推进器3,控制机器人上升或下潜;控制水平布置的水下推进器3,控制机器人前进或后退。
46.本实用新型中涉及的未说明部分与现有技术相同或采用现有技术加以实现。