一种设有防水机构的水下机器人探测识别装置及其使用方法
1.本发明涉及水下机器人技术领域,具体为一种设有防水机构的水下机器人探测识别装置及其使用方法。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具,无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种,水下机器人可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业,水下机器人上一般配备声呐系统、摄像机、照明灯和机械臂等装置,能提供实时视频、声呐图像,机械臂能抓起重物,水下机器人在石油开发、海事执法取证、科学研究和军事等领域得到广泛应用。
3.由于现有的大多数水下机器人在作业时随着水下作业深度的增加造成水压逐渐加强摄像头以及控制装置设置的防水处容易形成较小的渗漏,这小小的渗漏可能会对精密的电子元器件造成损坏,影响水下机器人的正常工作,还有水下环境复杂多变时常有脏污沾染在摄像机镜头上,不及时处理会造成镜头拍摄不清晰的问题。
技术实现要素:
4.(一)解决的技术问题
5.解决了水下机器人摄像设备在深水处容易渗漏及摄像头清理不方便的问题。
6.为解决上述技术问题,本发明的实施例采用的技术方案是:一种设有防水机构的水下机器人探测识别装置及其使用方法,包括底板,所述底板相邻的四边均设置有支撑柱,所述底板的四周均设置有防水玻璃,所述支撑柱的顶部设置有顶板,所述顶板的顶部设置有开槽,所述顶板顶部两侧的前侧和后侧均设置有防水结构,所述防水结构包括转轴、旋转座、固定柱、限位块、旋钮、省力杆、活动块、螺纹杆、挤压板、连接杆、手柄和卡块,当施加给省力杆一个推动的力时省力杆可以带动旋钮和螺纹杆旋转控制挤压板进行上下竖直移动,当个所述活动块施加一个推动的力时活动块可以带动旋转座以与固定柱转动连接处为圆心旋转。
7.作为优选,所述顶板顶部两侧的前侧和后侧均固定连接有固定柱,所述固定柱表面的顶部设置有旋转座,所述旋转座的一侧固定连接有活动块,所述活动块顶部的一侧贯穿有螺纹杆,所述螺纹杆的底部转动连接有挤压板,所述螺纹杆的顶部固定连接有旋钮,所述旋钮相邻的四壁均固定连接有省力杆,所述旋钮的顶部固定连接有限位块,所述限位块顶部的一侧开设有卡槽。
8.作为优选,所述固定柱的顶部固定连接有转轴,所述转轴的一侧转动连接有连接杆,所述连接杆的顶部固定连接有手柄,所述手柄的顶部设置有软垫,所述连接杆的另一侧固定连接有卡块。
9.作为优选,所述顶板的顶部设置有控制壳体,所述控制壳体的底部设置有拍摄装置,所述控制壳体的正面和背面均固定连接有把手,所述控制壳体顶部两侧的前侧和后侧均开设有挤压槽,所述挤压槽与挤压板相适配,所述控制壳体的底部设置有密封圈。
10.作为优选,所述底板上设置有清洁结构,所述清洁结构包括滑块、磁吸块、刮板、连接绳、滑轨、固定块、擦拭布、固定杆、移动块和丝杆,当个所述丝杆施加一个旋转的力时丝杆可以带动移动块控制固定块水平左右移动,所述固定块可以通过与磁吸块之间的额磁力配合带动磁吸块同时水平左右移动。
11.作为优选,所述底板内壁背面的一侧转动连接有丝杆,所述丝杆上设置有移动块,所述移动块的背面固定连接有固定杆,所述固定杆的正面固定连接有固定块,所述固定块的正面固定连接有擦拭布。
12.作为优选,所述底板内壁背面的另一侧固定连接有外壳,所述外壳内壁的底部固定连接有电机,所述电机的输出轴贯穿外壳且延伸至外壳的外部,所述电机的一侧与丝杆的一侧相固定连接。
13.作为优选,所述底板的正面固定连接有滑轨,所述滑轨的正面滑动连接有滑块,所述滑块的正面设置有连接绳,所述连接绳的顶部设置有磁吸块,所述磁吸块与固定块相适配,所述磁吸块的背面固定连接有刮板。
14.作为优选,所述顶板底部一侧的前侧和后侧均转动连接有探照灯,所述底板的一侧设置有螺旋桨,所述底板底部的一侧设置有伸缩支架,所述伸缩支架的一侧设置有机械爪。
15.作为优选,所述底板底部的前侧和后侧均固定连接有支架,所述支架底部的两侧均固定连接有衔接块,所述衔接块的底部固定连接有底座,所述底板的顶部开设有若干个通孔,所述底板的内部设置有吸水海绵。
16.与现有技术相比,本发明的实施例所提供的,控制壳体位于底板、防水玻璃以及顶板内,底板、防水玻璃以及顶板将控制壳体上的拍摄设备进行全方位防护包裹,相当于对拍摄设备进行二次防水处理,使得拍照设备的防水性更加完善,也可以更好的保护拍摄设备,防止复杂的水下环境对摄像设备造成碰撞发生损坏,顶板上设置有防水结构,防水结构可以通过使用者旋转省力杆控制挤压板向下移动对控制壳体进行固定限位,在进行固定限位的同时通过控制壳体与顶板之间密封圈的配合使水不会进入到这个密闭空间内,旋钮的顶部还可以通过与卡块的配合达到自锁的效果,让旋钮进行水下作业时不会发生松动造成水漏入,底板的内部还设置有吸水海绵,如果装置潜入的水深较深可能在巨大的水压下造成有轻微渗漏,渗漏的水可以被吸水海绵吸收,防止水在机器作业时不规则流动以及汽化产生雾气,底板上还设置有清洁结构,清洁结构可以通过固定块和磁吸块之间的配合完成对防水玻璃正反两面的擦拭,固定块可以控制擦拭布对内部的水雾进行擦拭,磁吸块可以控制刮板对防水玻璃的外表面进行擦拭,这样就可以防止机器在水下作业时防水玻璃的表面沾染脏污影响摄像设备对水下情况进行摄像,干扰使用者对水下情况的判断,影响作业效率,磁吸块上还设置有连接绳,连接绳可以防止磁吸块在使用者外力干扰较大造成磁吸失败从防水玻璃外表面脱落造成遗失,连接绳可以有效的将磁吸块固定住等待工作人员重新吸附再次使用。
17.应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用
于限制本公开。
18.本技术文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
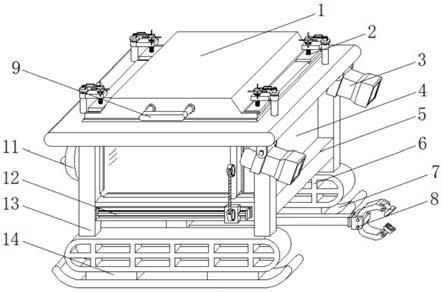
19.图1为本发明整体结构示意图;
20.图2为本发明外部结构正视示意图;
21.图3为本发明防水结构示意图;
22.图4为本发明固定柱外部结构示意图;
23.图5为本发明防水玻璃反面结构示意图;
24.图6为本发明清洁结构示意图;
25.图7为本发明控制壳体结构示意图;
26.图8为本发明底板结构示意图。
27.图中:1、控制壳体;2、防水结构;201、转轴;202、旋转座;203、固定柱;204、限位块;205、旋钮;206、省力杆;207、活动块;208、螺纹杆;209、挤压板;210、连接杆;211、手柄;212、卡块;3、探照灯;4、防水玻璃;5、底板;6、支架;7、底座;8、机械爪;9、把手;10、吸水海绵;11、螺旋桨; 12、清洁结构;1201、滑块;1202、磁吸块;1203、刮板;1204、连接绳;1205、滑轨;1206、固定块;1207、擦拭布;1208、固定杆;1209、移动块;1210、丝杆;13、支撑柱;14、衔接块;15、顶板;16、伸缩支架;17、电机;18、外壳;19、密封圈。
具体实施方式
28.使得本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
29.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,还可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
30.如图1至图8所示,本发明提供的一种设有防水机构的水下机器人探测识别装置及其使用方法,包括述底板5,底板5相邻的四边均设置有支撑柱13,底板5的四周均设置有防水玻璃4,支撑柱13的顶部设置有顶板15,顶板15 的顶部设置有开槽,顶板15顶部两侧的前侧和后侧均设置有防水结构2,防水结构2包括转轴201、旋转座202、固定柱203、限位块204、旋钮205、省力杆 206、活动块207、螺纹杆208、挤压板209、连接杆210、手柄211和卡块212,当施加给省力杆206一个推动的力时省力杆206可以带动旋钮205和螺纹杆208 旋转控制挤压板209进行上下竖直移动,当个活动块207施加一个推动的力时活动块207可以带动旋转座202以与固定柱203转动连接处为圆心旋转,防水玻璃4以及顶板15内,底板5、防水玻璃4
以及顶板15将控制壳体1上的拍摄设备进行全方位防护包裹,相当于对拍摄设备进行二次防水处理,使得拍照设备的防水性更加完善,也可以更好的保护拍摄设备,防止复杂的水下环境对摄像设备造成碰撞发生损坏。
31.顶板15顶部两侧的前侧和后侧均固定连接有固定柱203,固定柱203表面的顶部设置有旋转座202,旋转座202的一侧固定连接有活动块207,活动块207 顶部的一侧贯穿有螺纹杆208,螺纹杆208的底部转动连接有挤压板209,螺纹杆208的顶部固定连接有旋钮205,旋钮205相邻的四壁均固定连接有省力杆 206,旋钮205的顶部固定连接有限位块204,限位块204顶部的一侧开设有卡槽,使用者旋转省力杆206控制挤压板209向下移动对控制壳体1进行固定限位,在进行固定限位的同时通过控制壳体1与顶板15之间密封圈19之间的配合使水不会进入到这个密闭空间内。
32.固定柱203的顶部固定连接有转轴201,转轴201的一侧转动连接有连接杆 210,连接杆210的顶部固定连接有手柄211,手柄211的顶部设置有软垫,连接杆210的另一侧固定连接有卡块212,旋钮205的顶部还可以通过与卡块212 的配合达到自锁的效果,让旋钮205进行水下作业时不会发生松动造成水漏入。
33.顶板15的顶部设置有控制壳体1,控制壳体1的底部设置有拍摄装置,控制壳体1的正面和背面均固定连接有把手9,控制壳体1顶部两侧的前侧和后侧均开设有挤压槽,挤压槽与挤压板209相适配,控制壳体1的底部设置有密封圈19。
34.底板5上设置有清洁结构12,清洁结构12包括滑块1201、磁吸块1202、刮板1203、连接绳1204、滑轨1205、固定块1206、擦拭布1207、固定杆1208、移动块1209和丝杆1210,当个丝杆1210施加一个旋转的力时丝杆1210可以带动移动块1209控制固定块1206水平左右移动,固定块1206可以通过与磁吸块 1202之间的额磁力配合带动磁吸块1202同时水平左右移动,清洁结构12可以通过固定块1206和磁吸块1202之间的配合完成对防水玻璃4正反两面的擦拭,固定块1206可以控制擦拭布1207对内部的水雾进行擦拭,磁吸块1202可以控制刮板1203对防水玻璃4的外表面进行擦拭,这样就可以防止机器在水下作业时防水玻璃4的表面沾染脏污影响摄像设备对水下情况进行摄像。
35.底板5内壁背面的一侧转动连接有丝杆1210,丝杆1210上设置有移动块 1209,移动块1209的背面固定连接有固定杆1208,固定杆1208的正面固定连接有固定块1206,固定块1206的正面固定连接有擦拭布1207。
36.底板5内壁背面的另一侧固定连接有外壳18,外壳18内壁的底部固定连接有电机17,电机17的输出轴贯穿外壳18且延伸至外壳18的外部,电机17的一侧与丝杆1210的一侧相固定连接。
37.底板5的正面固定连接有滑轨1205,滑轨1205的正面滑动连接有滑块1201,滑块1201的正面设置有连接绳1204,连接绳1204的顶部设置有磁吸块1202,磁吸块1202与固定块1206相适配,磁吸块1202的背面固定连接有刮板1203,连接绳1204可以防止磁吸块1202在使用者外力干扰较大造成磁吸失败从防水玻璃4外表面脱落造成遗失,连接绳1204可以有效的将磁吸块1202固定住等待工作人员重新吸附再次使用。
38.顶板15底部一侧的前侧和后侧均转动连接有探照灯3,底板5的一侧设置有螺旋桨11,底板5底部的一侧设置有伸缩支架16,伸缩支架16的一侧设置有机械爪8。
39.底板5底部的前侧和后侧均固定连接有支架6,支架6底部的两侧均固定连接有衔
接块14,衔接块14的底部固定连接有底座7,底板5的顶部开设有若干个通孔,底板5的内部设置有吸水海绵10,如果装置潜入的水深较深可能在巨大的水压下造成有轻微渗漏,渗漏的水可以被吸水海绵10吸收,防止水在机器作业时不规则流动以及汽化产生雾气。
40.本实用发明的工作原理及使用流程:在使用时使用者需要先握住把手9将控制壳体1通过通槽将摄像设备放置到底板5、防水玻璃4以及顶板15组成的密闭空间内,放入进去后使控制壳体1底部的密封圈19与顶板15的顶部牢牢贴合,贴合好后使用者用手握住省力杆206并推动,省力杆206受力后带动旋钮205旋转,旋钮205带动螺纹杆208旋转,螺纹杆208带动挤压板209向下移动对控制壳体1进行挤压,使得控制壳体1与顶板15彻底密封,旋转好旋钮 205后使用者需要握住手柄211向一侧推动,手柄211受力后带动连接杆210以与转轴201转动连接处为圆心翻转,连接杆210带动卡块212卡入到旋钮205 顶部限位块204上开设的卡槽中对旋钮205进行限位达到一个自锁的功能,连接杆210与转轴201转动连接处设置有扭矩弹簧,这样连接杆210在非人为情况下不会松动打开,放入好控制壳体1后就可以将装置整体放入到水下,使用者控制螺旋桨11旋转以及探照灯3进行照明在水下进行作业即可,如果下水的深度较深,水压较大造成密闭空间内有水渗入时,底板5内的吸水海绵10可以将水珠吸收,当长时间在水下作业防水玻璃4内壁上有水雾或遇到水下环境较脏防水玻璃4外壁有脏污时可以启动电机17,电机17带动丝杆1210旋转,丝杆1210带动移动块1209移动,移动块1209通过固定杆1208带动固定块1206 左右水平移动,固定块1206通过磁吸带动防水玻璃4外部的磁吸块1202随之左右水平移动,固定块1206通过擦拭布1207将防水玻璃4的内壁水雾进行擦拭干净,磁吸块1202带动刮板1203将防水玻璃4外部的脏污刮干净,不会让脏污影响到摄像设备对水下环境的拍摄。
41.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1