一种用固体压载的自动防横倾系统的制作方法
1.本发明一种用固体压载的自动防横倾系统涉及船舶与海洋工程技术领域,为船舶横倾后的快速回正及船舶横倾的动态调平,提供了一种解决方案。
背景技术:
2.船舶的在装卸大型货物或进行吊装作业时,会产生横向倾斜,影响船舶的安全性。尤其是近些年兴起的重吊船,起重能力不断增加,对船舶的稳性及横倾调节系统造成了前所未有的挑战,如何在产生横倾后快速回正,如何在吊运过程中持续保持正浮状态,是关系到此类船舶性能的关键要素。此类问题的传统解决方案是在船舶两舷配备数对防横倾水舱,并设置大排量双向防横倾泵及与之匹配的大通径管路,此系统在以往实践逐渐显露缺点:设备多,空间占用大,调节时间长,自由液面对稳性会产生不良影响等。
3.cn215323203u公开的无人船平衡及远程可视化监控装置,包括船体,船体内配置有配重机构,配重机构包括配重块和传送组件,传送组件能够驱动所述配重块沿x向往返移动或沿z向往返移动;船体的侧面配置有平衡机构,平衡机构包括平衡板、连接件和调节组件,连接件的一端设于船体的侧面,连接件的另一端通过连接轴与平衡板的一侧边缘相连,调节组件能够驱动平衡板绕连接轴转动;通过配重机构和平衡机构的配合实现船体的平衡,降低船体摇晃幅度,防止侧翻,增强稳定性。但是该装置需在船体侧面配备平衡机构,装置相对复杂。
技术实现要素:
4.本发明所要解决的技术问题是提供一种系统简单,通过重块的横向移动调节横倾,实现船舶横倾后的快速回正以及船舶横倾的动态调平的固体压载的自动防横倾系统。
5.为了解决以上技术问题,本发明提供一种用固体压载的自动防横倾系统,包括重块、移动模块,还包括防横倾舱室、滚轮、联动轴、导向轨道、齿条板、带电磁抱闸的电机、齿轮箱、吃水液位测量传感器、plc单元、遥控面板;所述防横倾舱室内配置重块;该重块底面开设凹槽,凹槽内通过联动轴设置滚轮,组成移动模块;所述滚轮与导向轨道配合;所述重块顶面设置带电磁抱闸的电机和齿轮箱;通过带电磁抱闸的电机驱动重块移动,实现船舶横倾后静态防横倾的快速回正,以及船舶横倾动态防横倾的动态调平。
6.通过采用上述技术方案,防横倾舱室内配置重块,重块底面的凹槽内通过联动轴连接滚轮,重块顶面设置带电磁抱闸的电机和齿轮箱,相较于防横倾水舱,通过重块的横向移动调节横倾,其调节速度更快,船舶横倾后可快速回正,系统简单有效,易于实现,调节横倾速度较快,可实现复杂的瞬时的横倾调节,消除了自由液面对稳性的不良影响。
7.进一步的,重块采用钢结构容器型式,选取不同密度的介质作为填充,如水、重晶石,用以调节重量;根据需要,配备一组或多组重块;每组重块至少配备两组滚轮与联动轴;滚轮亦为钢结构容器加填充物型式,填充物可以为沙子。
8.通过采用上述技术方案,重块采用钢材做成容器的型式,可选取不同密度的介质作为填充,如水、重晶石,用以调节重量,可拓展性强,适用不同的防横倾需求。
9.进一步的,联动轴采用矩形花键联动轴,滚轮与矩形花键联动轴连接的地方设有啮合的键齿和键槽,保持跟联动轴同步旋转。
10.通过采用上述技术方案,花键联动轴与滚轮为多齿啮合,承载能力高,对中性好,导向性好,花键联动轴与滚轮强度削弱小,加工方便,易于装卸。
11.进一步的,导向轨道采用钢轨轧制而成,横跨整个防横倾舱室。
12.通过采用上述技术方案,横跨整个防横倾舱室的导向轨道采用钢轨轧制而成,提高耐磨性。
13.进一步的,齿条板、带电磁抱闸的电机、齿轮箱组成驱动与定位制动系统;所述带电磁抱闸的电机通过齿轮轴带动与齿条板啮合的齿轮箱,所述齿条板横跨整个防横倾舱室。
14.通过采用上述技术方案,电机、齿轮箱与重块装配在一起,电机发动时,带动齿轮箱,齿轮箱与齿条板啮合,从而带动重块一起沿齿条板移动。另一方面,电机带有电磁抱闸,可以快速刹停并限位,实现了重块的制动与定位。
15.进一步的,带电磁抱闸的电机为变频可调转速电机。
16.通过采用上述技术方案,带电磁抱闸的电机,亦为变频可调转速电机,用以调节重块的移动速度,适用动态的横倾调节。
17.进一步的,吃水液位测量传感器、plc单元、遥控面板组成重块移动的控制系统;吃水液位测量传感器、遥控面板与plc单元电性连接。
18.通过采用上述技术方案,吃水液位测量传感器、遥控面板分别与plc单元电性连接。遥控面板用于显示数据、选择控制逻辑及输入必要数据等;吃水液位测量传感器用于测量和向plc单元输出四角吃水数据;通过plc单元输出指令控制电机,实现自动调节横倾。
19.进一步的,吃水液位测量传感器配备四个,分别配备在船舶的前后左右四角;plc单元预先将船舶静水力数据录入,通过吃水数据,计算横倾角、船舶排水量、稳性要素数据,进而给出重块移动方案,输出指令控制电机;横倾角计算公式如下:横倾角θ=degrees(atan((dmp-dms)/b));船中左舷传感器吃水数据为dmp,船中右舷传感器吃水数据为dms,船中左舷传感器距船中右舷传感器的距离为b。
20.通过采用上述技术方案,plc单元预先将船舶静水力数据录入,通过吃水数据,计算横倾角、船舶排水量、稳性要素数据,进而给出重块移动方案,输出指令控制电机,实现自动调节横倾。
21.进一步的,静态防横倾的控制方法为:在遥控面板选择静态防横倾,输出指令;plc单元连续获取吃水液位测量传感器的数据并调取装卸货物前的吃水数据,计算船舶的横倾角、船舶排水量、重心高度,根据计算到的数据推算将船舶扶正所需的重块的位移量;plc单元根据初始横倾角的方向通过变频可调转速的带电磁抱闸的电机转向,驱动重块朝着横倾相反的方向运动,直到位移达到计算值;此时,刹停变频可调转速的带电磁抱闸的电机,plc单元继续监测横倾角数据直至横倾角数据趋于一个稳定的值;若横倾角数据偏差大于设置值,plc单元继续启动修正程序,修正算法基于重块的位移及与之对应的角度变化的线性关
系再次进行位移量的预测,之后再次开启变频可调转速的带电磁抱闸的电机驱动重块移动,到达目标位置后,再次刹停变频可调转速的带电磁抱闸的电机。
22.通过采用上述技术方案,plc单元根据初始横倾角的方向通过变频器调节电机转向,驱动重块朝着横倾相反的方向运动,适用于已处于横倾状态的船舶,例如装卸货物后,船舶处于一定角度的横倾状态,实现了船舶横倾后的快速回正。
23.进一步的,动态防横倾的控制方法为:在遥控面板选择动态防横倾,输出指令; plc单元连续获取吃水液位测量传感器的数据,并计算横倾角数值;随着起重作业开始,横倾角数值不断增大,达到触发值,plc单元根据吊物的重量与横倾角的方向,通过变频可调转速的带电磁抱闸的电机的转速与转向,驱动重块朝着横倾相反的方向运动;每隔一段时间,plc单元监测横倾角数值,若横倾角不断减小趋于零,则不断减小变频可调转速的带电磁抱闸的电机转速直至刹停;若横倾角保持不变或不断增大,则首先判断横倾的方向,确保重块移动方向与横倾方向相反,不断增加变频可调转速的带电磁抱闸的电机转速直至横倾角趋于0。
24.通过采用上述技术方案,plc单元根据吊物的重量与横倾角的方向,通过变频器调节电机的转速与转向,驱动重块朝着横倾相反的方向运动,适用于船舶横倾角连续变化的状态,例如重吊船的吊装作业,实现了船舶横倾后的快速回正及船舶横倾的动态调平。
25.相对于现有技术,本发明具有如下有益效果:1.本发明防横倾舱室内配置重块,重块底面的凹槽内通过联动轴连接滚轮,重块顶面设置带电磁抱闸的电机和齿轮箱,相较于防横倾水舱,通过重块的横向移动调节横倾,其调节速度更快,船舶横倾后可快速回正,系统简单有效,易于实现,调节横倾速度较快,可实现复杂的瞬时的横倾调节,消除了自由液面对稳性的不良影响。
26.2.本发明相较于防横倾水舱,采用填充水或重晶石的容器型式的重块密度大,占用空间更小;且重块重心较低,利于稳性;可选取不同密度的介质作为填充,可拓展性强。
27.3.本发明plc单元根据初始横倾角的方向通过变频器调节电机转向,驱动重块朝着横倾相反的方向运动,适用于已处于横倾状态的船舶,例如装卸货物后,船舶处于一定角度的横倾状态,实现了船舶横倾后的快速回正。plc单元根据吊物的重量与横倾角的方向,通过变频器调节电机的转速与转向,驱动重块朝着横倾相反的方向运动,适用于船舶横倾角连续变化的状态,例如重吊船的吊装作业,实现了船舶横倾后的快速回正及船舶横倾的动态调平。两种调节方案:静态防横倾、动态防横倾,实现了船舶横倾后的快速回正及船舶横倾的动态调平。
附图说明
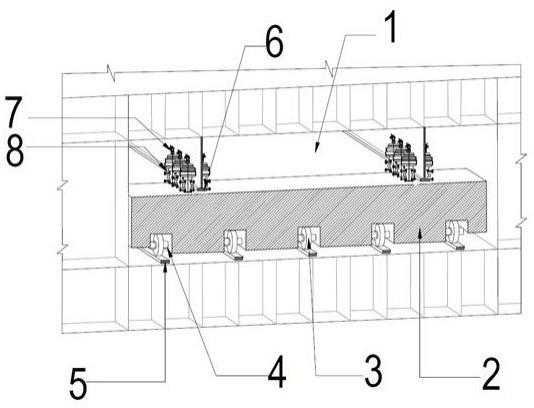
28.图1是本发明用固体压载的自动防横倾系统的纵向剖视图。
29.图2是本发明用固体压载的自动防横倾系统的齿条箱与齿条板的水平剖视图。
30.图3是船舶吊运货物时的横倾状态示意图。
31.图4是本发明用固体压载的自动防横倾系统的静态防横倾示意图。
32.图5是本发明用固体压载的自动防横倾系统的动态防横倾示意图。
33.其中:1.防横倾舱室、2.重块、3.滚轮、4.联动轴、5.导向轨道、6.齿条板、7.带电磁抱闸的电机、8.齿轮箱 、9.吊机、10.货物。
具体实施方式
34.下面结合附图对本发明的具体实施方式作进一步详细描述。以下实施方式用于说明本发明,但不用来限制本发明的范围。
35.一种用固体压载的自动防横倾系统,包括防横倾舱室1、重块2、滚轮3、联动轴4、导向轨道5、齿条板6、带电磁抱闸的电机7、齿轮箱8、吃水液位测量传感器、plc单元、遥控面板。吃水液位测量传感器配备至少四个,其中四个分别配备在船舶的前后左右四角。
36.图1为某重吊船防横倾舱室系统的纵向剖视图,该船的一个防横倾舱室1设置在双层底之上,在两舷侧之间。防横倾舱室1内配置一个重块2,重块2底面开设凹槽,凹槽内通过联动轴4设置滚轮3;滚轮3与导向轨道5配合。重块2顶面设置带电磁抱闸的电机7和齿轮箱。联动轴4采用矩形花键联动轴,滚轮3与矩形花键联动轴连接的地方设有相应的键齿和键槽,保持跟联动轴4同步旋转;花键联动轴与滚轮3为多齿啮合。重块2与滚轮3、联动轴4装配,组成移动模块,通过带电磁抱闸的电机7驱动,被限于导向轨道5上移动。导向轨道5横跨整个防横倾舱室1,采用钢轨轧制而成。重块2为钢结构容器,灌入重晶石;滚轮3亦为钢结构容器,灌入沙子,共两排,每排5个,整个移动模块所能产生的最大力矩,大于吊机设计的极限工况所产生的力矩。
37.吃水液位测量传感器、plc单元、遥控面板组成重块2移动的控制系统;吃水液位测量传感器、遥控面板与plc单元电性连接。吃水液位测量传感器配备至少四个,其中四个分别配备在船舶的前后左右四角;plc单元预先将船舶静水力数据录入,通过吃水数据,计算横倾角、船舶排水量、稳性要素数据,进而给出重块移动方案,输出指令控制电机7。
38.结合图1与图2,齿条板6、带电磁抱闸的电机7、齿轮箱8组成驱动与定位制动系统;电机7连接齿轮箱8的齿轮轴,电机7带动齿轮箱8,齿轮箱8与齿条板6啮合,齿条板6也横跨整个防横倾舱室1。电机7、齿轮箱8与重块2装配在一起。电机7与齿轮箱8共四排,每排4对,分布在两个齿条板6的两侧。电机7发动时,带动齿轮箱8,齿轮箱8与齿条板6啮合,从而带动重块2一起沿齿条板6移动。齿条板6、电机7、齿轮箱8组成了驱动系统。另一方面,电机7带有电磁抱闸,可以快速刹停并限位,从而实现了重块2的制动与定位。同时电机7亦为变频可调转速电机,可以通过调节转速来控制重块的移动速度。
39.结合图3与图4,展示了本发明的静态防横倾方式,假设船舶未吊货物10时无横倾,当吊机9吊运右舷的货物10时,船舶右倾,如图3所示。此时在船舶驾驶室的遥控面板上选择静态防横倾,输出指令,控制plc单元连续获取吃水液位测量传感器的数据并调取船舶未吊货物10时的吃水数据。plc单元通过这些吃水数据,与之前录入的船舶静水力数据,自动计算船舶的横倾角、船舶的排水量、重心高度数据,根据这些数据进一步推算出将船舶扶正所需的重块2的位移量;之后plc单元发动电机7,并控制电机7转向,驱动重块2朝着左舷运动,直到位移达到计算值。此时,plc单元发出指令刹停电机7,之后plc单元继续监测横倾角数据,待遥控面板上显示的横倾角稳定后,其值接近于0,表示此次横倾调节达到预期效果,船舶处于正浮状态,如图4所示。
40.横倾角计算公式如下:横倾角θ=degrees(atan((dmp-dms)/b));船中左舷吃水液位测量传感器的吃水数据为dmp,船中右舷吃水液位测量传感器的吃水数据为dms,船中左舷吃水液位测量传感器的距船中右舷吃水液位测量传感器的的
距离为b。
41.结合图5,展示了本发明的动态防横倾方式,假设吊机9吊运货物10处在a位置时无横倾。当吊机9开始增加仰角时,在船舶驾驶室的遥控面板上选择动态防横倾,输出指令,控制plc单元连续获取吃水液位测量传感器的数据,并计算横倾角数值。随着吊机臂仰角增大,左倾的数值不断增大,当达到0.2度时,此时plc单元触发电机,驱动重块2朝着右舷运动。与此同时,plc单元继续监测横倾角数值,10s之后,plc单元通过接收到的吃水数据计算发现,左倾的数值增加至0.25度,此时plc单元发出指令加快电机7转速,从而加快重块2朝着右舷运动。又过了10s,plc单元通过接收到的吃水数据计算发现,左倾的数值减少至0.2度,此时plc单元无指令,电机7继续维持当下转速,带动重块2继续朝着右舷运动。之后每隔10s都通过吃水数据计算横倾状态,并依据左倾的数值发送指令,调节电机7转速,直至5分钟后,吊机9与货物10从a位置移动到b位置后停止,此时对应的,重块2也由a位置移动到b位置,此时横倾角接近于零,plc单元发出指令,刹停电机7,达到图5所示状态。
42.横倾角计算公式如下:横倾角θ=degrees(atan((dmp-dms)/b));船中左舷吃水液位测量传感器的吃水数据为dmp,船中右舷吃水液位测量传感器的吃水数据为dms,船中左舷吃水液位测量传感器的距船中右舷吃水液位测量传感器的的距离为b。
43.本发明通过重块2的横向移动实现船舶的横倾调节,本发明重块驱动与定位制动系统简单有效,易于实现,调节横倾速度较快,可实现复杂、瞬时的横倾调节。
44.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定此发明的具体实施只局限于这些说明。对于本发明所属技术领域的技术人员来说,在不脱离本发明构思的前提下,还可以做作若干等同替代或明显变型,而且性能或用途相等,都应视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1