一种直驱式高效低噪电动舵机及其控制系统和控制方法
1.本发明属于水下航行器技术领域,具体涉及一种直驱式高效低噪电动舵机及其控制系统和控制方法。
背景技术:
2.应用于水下航行器的电动舵机系统是一种高精度的位置伺服系统,通过控制舵机输出端转角,实现舵面的翻转,多个舵面共同作用下,从而实现水下航行器的姿态调整。由于水下环境为非线性时变系统,除舵机本身结构需求外,一种精度高、稳定性强、可靠性强的控制方法是水下航行器航行稳定、精准的关键所在。针对水下航行器“声隐身”、传动效率高、运行噪声低等需求,采用一种包含行星滚柱丝杠传动方式的直驱电动舵机,可有效解决因齿轮等传动链产生的噪音大和能量耗散问题,而作为舵机驱动的一体式行星滚柱电机,采用一种稳定可靠的控制系统,是水下航行器运动可靠且稳定准确的关键。
3.因此,需要一种直驱式的电动舵机,以及针对直驱电动舵机的控制系统及方法,以实现直驱电动舵机的高精度角度输出及可靠的系统控制。
技术实现要素:
4.本发明的目的针对采用基于直驱的电动舵机,提出了一种稳定可靠、高精度的控制系统和控制方法,通过外部传感器检测角度等参数进行反馈,同时针对误差进行补偿,大大提高舵机角度输出精度,具有重要的应用价值与意义。
5.本发明的直驱式高效低噪电动舵机,包括壳体、一体化行星滚柱丝杠驱动装置、倒置曲柄滑块机构和动力输出轴;所述一体化行星滚柱丝杠驱动装置的行星滚柱螺母作为倒置曲柄滑块机构的滑块,倒置曲柄滑块机构的摇臂连接于动力输出轴以驱动该动力输出轴转动;所述一体化行星滚柱丝杠驱动装置包括定子、行星滚柱丝杠、驱动保护壳和行星滚柱螺母;所述定子固定安装于驱动保护壳内;所述行星滚柱丝杠包括转子段、过渡段和丝杠段;所述转子段伸入驱动保护壳内与定子配合;所述丝杠段与行星滚柱螺母配合形成行星滚柱传动。所述行星滚柱丝杠的转子段通过轴承支承于驱动保护壳内,且转子段的端面与轴承端面之间设有用于对转子段进行轴向限位的垫片。所述倒置曲柄滑块机构包括连杆和摇臂;所述连杆铰接于行星滚柱螺母和摇臂之间;所述摇臂通过花键连接于动力输出轴。所述连杆为两根且分设在行星滚柱螺母上下两侧,所述摇臂的一端为叉形结构并通过两分叉分别与两连杆铰接。所述驱动保护壳内端面安装有编码器以获取转子的转角。所述动力输出轴上方设有用于获取其转角的角位移电位器。
6.本发明的一种直驱式高效低噪电动舵机的控制系统,包括:
7.指令发送模块,其用于发送电动舵机输出轴指定的输出角度位置信息;
8.控制器计算模块,其用于根据传动系统确定出的数学模型,计算一体化行星滚柱丝杠驱动装置所需的驱动量;
9.直驱电机控制器和直驱电机驱动器,所述直驱电机控制器用于接收所述控制器计
算模块发出的驱动量,并将电机驱动信号发送至直驱电机驱动器以控制一体化行星滚柱丝杠驱动装置的转子转动;
10.误差补偿模块,其用于当所述控制器计算模块输出驱动信息时,将编码器返回的转子角度信息与输出轴角度信息同理论值进行比对,并对偏差进行补偿;
11.角度传感器,其用于检测电动舵机输出轴的旋转角度值,并将该旋转角度值与指令发送模块发出位置信息相结合形成负反馈链。
12.本发明公开的一种直驱式高效低噪电动舵机的控制方法,包括以下步骤:
13.s1.根据航行任务需求,指令发送模块人为或自动发出电动舵机输出轴希望达到的设定角度位置信息;
14.s2.控制器计算模块接收指令发送模块发送的指令,通过计算获得一体化行星滚柱丝杠驱动装置所需驱动信息;
15.s3.直驱电机控制器接收所述驱动信息,并向直驱电机驱动器发送控制指令,使直驱电机驱动器驱动一体化行星滚柱丝杠驱动装置的转子转动,从而通过倒置曲柄滑块机构带动舵机输出轴转动;
16.s4.电机编码器与输出轴处的角度传感器实时获取电机旋转角度与输出轴实际转动角度,并将所述电机旋转角度与输出轴实际转动角度值共同输入误差补偿模块,再由误差补偿模块输出信息,与控制器计算模块输出信息共同作用,修正直驱电机控制器所接收到的驱动信息;
17.s5.将角度传感器测量的输出轴转动角度信息与指令发送模块发出位置信息相结合,形成负反馈链。
18.本发明的有益效果:
19.1.本发明利用误差补偿模块,将一体化行星滚柱丝杠驱动装置与舵机输出轴二者旋转角度误差直接反作用于直驱电机的输入,进一步提高了控制系统的控制精度。
20.2.本发明基于直驱电动舵机控制,采用负反馈控制系统,将输出轴实际角度与指令发出角度结合,能够有效对传动链中的振动、传动间隙等硬件问题引起的误差进行补偿。
21.3.本发明通过误差补偿与正向控制系统相结合,有效实现了直驱电动舵机的控制,具有重要的应用价值与意义。
22.4.本发明的电动舵机,巧妙结合丝杠与电机驱动,设计了一种驱动传动一体化输入方式,去除了现有电机与传动系统间的连接,简化了传动部件,提高了能量利用率;采取行星滚柱丝杠传动方式,减速比大、功率密度高、承载能力大、刚度高和可靠性强等优点弥补了解决了减速机后的扭矩不足、转速过高等问题,并且减少了减速机带来的噪声、效率损失难点;本发明的电动舵机,其倒置曲柄滑块机构中应用了叉形连杆,提高了空间利用率,减少了空间浪费,使结构更加紧凑。本发明的电动舵机,结构简单,趋于模块化,方便拆卸安装,易于检修。
附图说明
23.下面结合附图和实施例对本发明作进一步描述。
24.图1为本发明的整体结构示意图;
25.图2为本发明的一体化行星滚柱丝杠驱动装置的结构示意图;
26.图3为本发明的舵机控制系统的整体示意图;
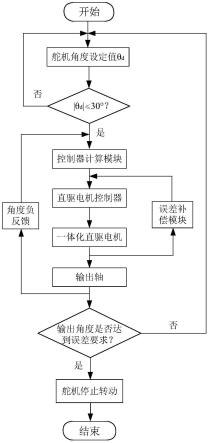
27.图4为本发明的舵机控制系统的控制流程图;
28.图5为倒置曲柄滑块结构的示意图。
29.附图标记:1-一体化行星滚柱丝杠驱动装置;101-后端轴承;102-定子;103
‑ꢀ
前端垫片;104-前端轴承;105-行星滚柱螺母;106-行星滚柱丝杠;107-驱动保护壳;108-后端垫片;109-编码器;2-圆锥滚子轴承
①
;3-安装螺钉;4-顶盖;5-连杆;6-连杆垫片;7-圆锥滚子轴承
②
;8-开口销;9-底座;10-动力输出轴;11-摇臂;12-输出轴圆锥滚子轴承;13-角位移电位器。
具体实施方式
30.如图1所示,本实施例的一种直驱式高效低噪电动舵机,包括壳体、一体化行星滚柱丝杠驱动装置1、倒置曲柄滑块机构和动力输出轴。
31.所述一体化行星滚柱丝杠驱动装置1包括驱动保护壳、定子102、行星滚柱丝杠106和行星滚柱螺母105;所述定子102固定安装于驱动保护壳107内;所述行星滚柱丝杠106包括转子段、过渡段和丝杠段;转子段上环形均布有永磁体,过渡段为阶梯式光轴并位于驱动保护壳107外;所述转子段伸入驱动保护壳107内与定子102配合;定子102环绕于转子段,永磁体转子段产生的磁场与定子102通电产生的磁场相互作用,产生使转子旋转的作用力;所述行星滚柱丝杠106的转子段通过前端轴承104和后端轴承101支承于驱动保护壳107 内,且转子段的永磁体的两端面与前、后端轴承101的端面之间设有用于对转子段进行轴向限位的前端垫片103和后端垫片108,以减小整个行星滚柱丝杠106的轴向窜动,行星滚柱丝杠106的过渡段和丝杠段尾部分别通过圆锥滚子轴承ⅰ2和圆锥滚子轴承ⅱ7支承于壳体内。所述驱动保护壳107内端面安装有编码器109以获取转子的转角。所述丝杠段与行星滚柱螺母105配合形成行星滚柱传动,将行星滚柱螺母105的旋转自由度限制即可实现直线运动的输出;行星滚柱螺母105作为倒置曲柄滑块机构的滑块使用,可提高舵机整体传动系统的紧凑性。所述倒置曲柄滑块机构包括连杆5和摇臂11(行星滚柱螺母105为滑块);所述连杆5为两根且分设在行星滚柱螺母105上下两侧,两连杆5一端分别与行星滚柱螺母105的上下面铰接,所述摇臂11的一端为叉形结构,其通过两分叉分别与两连杆5的另一端铰。连杆5两端与螺母和摇臂11的铰接处应设置垫片6和开口销8,以减小曲柄滑块机构运转时的磨损。摆臂的两侧应设置机械限位以限制摆臂的转角同时避免行星滚柱螺母105冲击轴承。所述摇臂 11通过花键连接于动力输出轴10。所述动力输出轴10通过两个背对背设置的输出轴圆锥棍子轴承12支撑在壳体内,输出轴上方设有用于获取其转角的角位移电位器13。所述壳体包括通过安装螺钉3相互紧固的底座9和顶盖4,壳体材料为高强度铝合金,轴承座、机械限位开关等结构均被设计为与壳体一体化,降低了各构件间连接缝隙在工作过程中产生的振动噪声。本发明的传动路线为:一体化行星滚柱丝杠驱动装置1
─
连杆5
─
摇臂11
─
动力输出轴10,一体化行星滚柱丝杠驱动装置1在磁场的相互作用力下带动丝杆旋转运动,行星滚柱丝杠副将丝杠的转动转化为行星滚柱螺母105的直线运动,进而通过连杆5推动摇臂11转动,与摇臂11相连的输出轴也随之转动,摇臂11运动两侧由底座上一成型的机械结构实现可靠限位,故输出轴只能在特定角度范围内做转动。
32.如图3所示,本实施例所采用的直驱式高效低噪电动舵机的控制系统,包括:指令
发送模块,其用于发送电动舵机输出轴指定的输出角度位置信息;控制器计算模块,其用于根据传动系统确定出的数学模型,计算一体化行星滚柱丝杠驱动装置所需的驱动量;直驱电机控制器和直驱电机驱动器,所述直驱电机控制器用于接收所述控制器计算模块发出的驱动量,并将电机驱动信号发送至直驱电机驱动器以控制一体化行星滚柱丝杠驱动装置的转子转动;误差补偿模块,其用于当所述控制器计算模块输出驱动信息时,将编码器返回的转子角度信息与输出轴角度信息同理论值进行比对,并对偏差进行补偿;角度传感器,其用于检测电动舵机输出轴的旋转角度值,并将该旋转角度值与指令发送模块发出位置信息相结合形成负反馈链。
33.如图4所示,利用所述控制系统对所述直驱式高效低噪电动舵机进行控制的方法,包括以下步骤:
34.s1.根据航行任务需求,指令发送模块人为或自动发出电动舵机输出轴希望达到的设定角度位置信息;
35.s2.控制器计算模块接收指令发送模块发送的指令,通过对传动系统及直驱电机进行推导得到的数学模型进行计算获得一体化行星滚柱丝杠驱动装置所需驱动信息;数学模型的推导过程为:
36.设直驱电机转速为ω,行星滚柱丝杠螺距为p,螺母(滑块)直线位移为s,则螺母(滑块)直线位移速度
37.如图5所示,设倒置曲柄滑块结构中连杆长度为l1,曲柄长度为l2。
38.则输出角度θ和连杆、曲柄与滑块位移间关系为:
39.(l2(1-cos(θ)))2+(l1+s-l2sin(θ))2=l
12
40.化简可得:
[0041][0042]
若假设l1=40mm,l2=100mm,则可得到输出转速
[0043]
若p=5mm/rpm,则传动比为:
[0044][0045]
至此,数学模型推导完毕。
[0046]
s3.直驱电机控制器接收所述驱动信息,并向直驱电机驱动器发送控制指令,使直驱电机驱动器驱动一体化行星滚柱丝杠驱动装置的转子转动,从而通过倒置曲柄滑块机构带动舵机输出轴转动;
[0047]
s4.电机编码器与输出轴处的角度传感器实时获取电机旋转角度与输出轴实际转动角度,并将所述电机旋转角度与输出轴实际转动角度值共同输入误差补偿模块,再由误差补偿模块输出信息,与控制器计算模块输出信息共同作用,修正直驱电机控制器所接收到的驱动信息;
[0048]
s5.将角度传感器测量的输出轴转动角度信息与指令发送模块发出位置信息相结
合,形成负反馈链,从而大幅度提高控制系统精度与输出轴精度。
[0049]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1