一种欠驱动浮力调节装置及其调节方法
1.本发明涉及水下机器人辅助装置,具体是涉及一种欠驱动浮力调节装置及其调节方法。
背景技术:
2.海洋作为人类的第二大发展空间,蕴含着丰富的能源和生物资源。水下机器人在海洋资源开发中发挥着不可替代的作用,然而由于复杂的水下环境,需要水下机器人具有良好的浮力调节性能来适应不同水域、不同深度的海水密度的变化。如今的水下机器人浮力调节有多种方式,如通过液压泵或高压气动系统调节浮力,但上述方式系统结构复杂,并增加了水下机器人的自重。
3.现有技术中,如专利申请cn202010893259.9公开了一种水下机器人姿态控制及浮潜调节装置,其通过水平面内十字型布置的四个压缩罐吸水和排水改变压缩罐的配重从而调节水下机器人姿态,但该装置需要两个电机进行驱动,会产生能源动力冗余,一个电机同步调节左、右压缩罐体积,另一个电机同步调节前、后压缩罐体积,每个压缩罐不能单独调节,调节方式不灵活,同时,该装置只能调节水下机器人姿态,不能调节水下机器人浮力,调节能力有限。再如专利申请cn202010799398.5公开了一种双向容积式浮力调节装置及其测试装置与测试方法,其双向容积式浮力调节装置左、右两个调节模块可以分别独立调节,既可以调节水下机器人姿态,又可以调节水下机器人浮力。但该装置的左、右两个调节模块分别依靠左、右两个电动推杆进行驱动,自由度数与驱动源数相等,属于完全驱动系统,结构复杂,增加水下机器人自重,且该系统只能实现一个维度上的浮力及浮力矩调节,调节能力也有限。
技术实现要素:
4.发明目的:针对以上缺点,本发明提供一种自重小、能源利用率高且调节灵活的欠驱动浮力调节装置。
5.本发明还提供一种欠驱动浮力调节装置的调节方法。
6.技术方案:为解决上述问题,本发明采用一种欠驱动浮力调节装置,包括动力模块和至少两个调节模块,所述动力模块包括一个驱动电机、连接于驱动电机输出端的蜗杆,驱动电机带动蜗杆转动,所述调节模块包括调节浮力的伸缩筒、传动轴、套设于传动轴上且与蜗杆啮合的蜗轮、周向定位于传动轴上的第一花键齿轮,所述伸缩筒包括滑动筒和套设于滑动筒外侧的固定筒,滑动筒在固定筒内滑动改变伸缩筒的体积,所述传动轴设置于固定筒远离滑动筒的一端,传动轴延伸方向垂直于滑动筒的滑动方向,且传动轴绕轴线相对固定筒转动,所述滑动筒通过连接装置与传动轴连接,第一花键齿轮转动带动传动轴转动从而带动滑动筒滑动,所述蜗轮一侧设置与第一花键齿轮大小形状相同的凹槽,凹槽侧面设置花键齿,且凹槽底面设置电磁控制装置,所述第一花键齿轮一侧与传动轴之间设置弹性部件,另一侧设置磁性金属,所述电磁控制装置得电时吸附磁性金属,弹性部件产生形变,
第一花键齿轮与蜗轮凹槽内的花键齿啮合,此时蜗轮转动带动第一花键齿轮转动;所述电磁控制装置失电时,弹性部件恢复形状,第一花键齿轮脱离蜗轮的凹槽;电磁控制装置,控制简单;
7.所有调节模块的蜗轮均匀分布于蜗杆的圆周上。
8.进一步的,所述连接装置包括第二连接组件,第二连接组件包括固定套设于传动轴上的第二传动齿轮、第二柔性臂,所述第二柔性臂一端与第二传动齿轮连接,另一端与滑动筒连接,所述第二柔性臂包括若干依次铰接的链节、设置于链节上的自锁装置,所述第二传动齿轮沿第一方向转动时,第二传动齿轮接触第二柔性臂,将自锁装置解锁,链节之间相互转动,使第二柔性臂缠绕在第二传动齿轮上;所述第二传动齿轮沿第二方向转动时,第二柔性臂离开第二传动齿轮,链节通过自锁装置自锁,链节之间不再相互转动。采用柔性臂结构形式驱动,结构紧凑,传统伸缩杆、齿轮齿条等驱动机构,若移动部件的伸出距离为l,则驱动机构还需要预留出长度为l空间用于回收移动部件。对于装置,若移动部件的伸出距离为l,则需要预留出长度为l/π,π约为3.14,所以l/π<l。自锁装置实现柔性臂刚性和柔性状态的变换。
9.进一步的,所述弹性部件一侧与第二传动齿轮固定连接,另一侧与第一花键齿轮固定连接。
10.进一步的,所述第二柔性臂包括两个前后铰接的前链节和后链节,所述自锁装置包括棘轮、棘轮轴、容纳棘轮的棘轮外壳、棘齿和制动件,所述棘轮外壳套设在棘轮轴上,且棘轮外壳固定设置于前链节上,所述前链节后端和后链节前端通过棘轮轴铰接,棘轮轴与后链节固定连接,所述棘轮固定套设于棘轮轴上,棘齿一端压在棘轮的齿上,棘齿另一端与制动件固定连接,所述制动件包括制动连接杆和制动板,所述制动连接杆一端穿过前链节与棘齿固定连接,制动连接杆另一端与制动板连接,制动板接触第二传动齿轮时,第二传动齿轮带动制动板转动,从而制动连接杆带动棘齿转动,棘齿脱离棘轮。
11.进一步的,每个链节均包括面对面设置的第一链节板和第二链节板,所述第一链节板和第二链节板中间上下两端分别通过两个滚子轴固定连接,两个滚子轴上均套设有滚子,滚子位于第一链节板和第二链节板之间,且滚子边缘位于第一链节板和第二链节板边缘外侧,第二柔性臂缠绕在第二传动齿轮上时,链节靠近第二传动齿轮一侧的滚子位于第二传动齿轮的齿槽内。
12.进一步的,所述第一链节板和第二链节板均设置自锁装置,且第一链节板和第二链节板上自锁装置的棘轮旋转方向相反。
13.进一步的,所述连接装置还包括第一连接组件,所述第一连接组件包括套设于传动轴上的第一传动齿轮、第一柔性臂,传动轴转动带动第一传动齿轮转动,所述第一柔性臂一端与第一传动齿轮固定连接,另一端与滑动筒固定连接,第一柔性臂与第二柔性臂结构相同,第一传动齿轮和第一柔性臂的连接方式与第二传动齿轮和第二柔性臂的连接方式相同。
14.进一步的,所述第一连接组件还包括第一齿轮、第二齿轮和齿轮传动轴,所述第二齿轮固定套设与传动轴上,第一齿轮和第二齿轮相互外啮合,所述传动齿轮轴包括轴部和齿部,所述轴部延伸方向与齿部齿轮的中心轴线重合,所述第一齿轮固定套设于齿轮传动轴轴部上,所述第一传动齿轮围绕传动轴开设有齿轮槽,所述齿轮传动轴的齿部与第一传
动齿轮的齿轮槽相互啮合,且第一齿轮齿数和第一传动齿轮齿轮槽齿数的乘积与第二齿轮齿数和齿轮传动轴齿部齿数的乘积相同。
15.进一步的,还包括与固定筒固定设置的第二固定外壳、套设于传动轴上的第二花键齿轮,所述第二花键齿轮通过滑杆与第一花键齿轮固定连接,所述滑杆穿过第二传动齿轮,滑杆相对第二传动齿轮周向定位,并相对第二传动齿轮轴向滑动,所述第二固定外壳套设在传动轴上,且第二固定外壳围绕传动轴开设圆槽,圆槽侧壁设置花键齿,当电磁控制装置失电时,第二花键齿轮与圆槽内的花键齿啮合,传动轴无法转动,形成制动。
16.本发明还采用一种欠驱动浮力调节装置的调节方法,包括以下步骤:
17.步骤1:采集欠驱动浮力调节装置的姿态信息;
18.步骤2:建立浮力调节装置空间坐标系oxyz:以动力模块的几何中心作为坐标原点o,以蜗杆轴线作为z轴,以其中一个调节模块的中心轴线作为x轴,以垂直于x轴和z轴的轴线作为y轴;
19.步骤3:设定欠驱动浮力调节装置的目标姿态信息,得到调节需要的目标浮力f、浮力矩m;
20.步骤4:将目标浮力f、浮力矩m向坐标轴进行分解,得到各坐标轴上的分力及分力距,根据得到的分力及分力距计算每个调节模块的调节量;
21.步骤5:根据计算的调节量对调节模块进行调节,使欠驱动浮力调节装置达到目标姿态。
22.有益效果:本发明相对于现有技术,其显著优点是通过一个电机驱动多个调节模块进行调节作用,从而减小了装置的整体体积,提高了能源利用率,减少了机电系统故障率和自重,且每个调节模块可以独立调节,使得浮力调节更加灵活。柔性臂设计控制简单,相较于传统的伸缩杆、齿轮齿条等驱动机构,柔性臂结构用于回收移动部件的预留长度较小。自锁装置可实现链节之间角度的自动调整便于柔性臂自动卷曲,可实现链节之间自动锁死,限制链节之间的转动,便于柔性臂伸长,从而能够高效实现柔性臂的卷曲和伸长。并将电磁控制装置、驱动电机、调节组件、齿轮组进行模块化设计,使得系统结构紧凑,便于浮力调节装置的安装。连接装置采用齿轮组,运动稳定性高,能够高效实现蜗轮两侧的柔性臂的同步运动。
附图说明
23.图1所示为本发明采用四个调节模块的欠驱动浮力调节装置整体结构收缩示意图;
24.图2所示为本发明采用四个调节模块的欠驱动浮力调节装置整体结构展开示意图;
25.图3所示为本发明采用四个调节模块的欠驱动浮力调节装置中动力模块的横向剖视图;
26.图4所示为本发明采用四个调节模块的欠驱动浮力调节装置中动力模块的左视图;
27.图5所示为本发明采用四个调节模块的欠驱动浮力调节装置中动力模块的纵向剖视图;
28.图6所示为本发明采用四个调节模块的欠驱动浮力调节装置中调节模块的主视图;
29.图7所示为本发明采用四个调节模块的欠驱动浮力调节装置中调节模块的剖视图;
30.图8所示为图6中a-a处剖视图;
31.图9所示为图6中b-b处剖视图;
32.图10所示为图9中i处局部放大图;
33.图11所示为图9中j处局部放大图;
34.图12所示为本发明第二连接组件的主视图;
35.图13所示为本发明第二连接组件的俯视图;
36.图14所示为图13中沿e-e处剖视图;
37.图15所示为本发明欠驱动浮力调节装置中链节的主视图;
38.图16所示为图15中沿g-g处剖视图;
39.图17所示为第一链节板的结构示意图;
40.图18所示为第二链节板的结构示意图;
41.图19所示为本发明欠驱动浮力调节装置中自锁装置的剖视图;
42.图20所示为图19中沿f-f处剖视图;
43.图21所示为本发明欠驱动浮力调节装置中两个连接的链节的剖视图;
44.图22所示为图21中沿h-h处剖视图;
45.图23所示为图21中沿d-d处剖视图;
46.图24所示为本发明单个调节模块运动简图;
47.图25所示为本发明采用四个调节模块时x轴向调节模块第一运动状态简图;
48.图26所示为本发明采用四个调节模块时x轴向调节模块第二运动状态简图;
49.图27所示为本发明采用四个调节模块时y轴向调节模块第一运动状态简图;
50.图28所示为本发明采用四个调节模块时y轴向调节模块第二运动状态简图;
51.图29所示为本发明采用四个调节模块时双轴向调节模块运动状态简图;
52.图30(a)所示为采用三个调节模块的欠驱动浮力调节装置结构示意图;图30(b)所示为采用五个调节模块的欠驱动浮力调节装置结构示意图;图30(c)所示为采用六个调节模块的欠驱动浮力调节装置结构示意图。
具体实施方式
53.实施例1
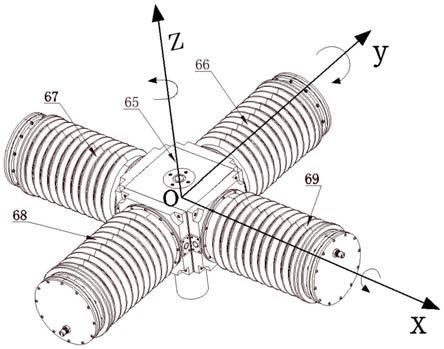
54.如图1、图2、图30(a)、图30(b)、图30(c)所示,本实施例中的一种欠驱动浮力调节装置,包括动力模块65和至少两个调节模块,调节模块围绕动力模块65均匀分布,在本实施例中以四个调节模块为例进行说明。
55.如图1和图2所示,本实施例中采用四个调节模块的欠驱动浮力调节装置,包括动力模块65、第一调节模块66、第二调节模块67、第三调节模块68、第四调节模块69。其中,第一调节模块66、第二调节模块67、第三调节模块68、第四调节模块69结构相同。动力模块65位于中心位置,第一调节模块66、第二调节模块67、第三调节模块68、第四调节模块69围绕
动力模块65均匀分布,且第一调节模块66和第三调节模块68对称分布于动力模块65两侧,第二调节模块67和第四调节模块69对称分布于动力模块65两侧。
56.四个调节模块可以独立进行伸长和收缩运动,当四个调节模块同步伸长时,浮力矩为零,当四个调节模块伸长到极限长度,产生的浮力最大。当第一调节模块66伸长,其他三个调节模块不工作时,浮力矩不为零,整个装置绕x轴顺时针转动;当第三调节模块68伸长,其他三个调节模块不工作时,浮力矩不为零,整个装置绕x轴逆时针转动;当第二调节模块67伸长,其他三个调节模块不工作时,浮力矩不为零,整个装置绕y轴顺时针转动;当第四调节模块69伸长,其他三个调节模块不工作时,浮力矩不为零,整个装置绕y轴逆时针转动。
57.如图3所示,四个调节模块均通过连接法兰4与动力模块65的固定架3固定连接,四个调节模块的蜗轮11围绕动力模块65的蜗杆14均匀分布,且四个调节模块的蜗轮11均与蜗杆14啮合。
58.如图4和图5所示,动力模块65包括一个驱动电机2、连接于驱动电机2输出端的蜗杆14,驱动电机2固定于电机外壳1内,端盖75通过螺钉与电机外壳1一端连接,端盖75上设置螺纹孔,端盖75外侧设置电机电缆插座79,电机电缆插座79与端盖75上的螺纹孔锁紧,并通过电缆插座密封圈74实现静密封,电机电缆插座79用于将装置中的电缆接出,并防止水进入装置,螺栓70将电机外壳1另一端、驱动电机2固定在固定架3上,驱动电机2通过d型电机轴与蜗杆14下端固定连接,蜗杆14上端通过滑动轴承i19安装在密封端盖i13上,密封端盖i13通过螺钉安装在固定架3上端,蜗杆14下端通过滑动轴承iii71安装在密封端盖iii73上,密封端盖iii73通过螺钉安装在固定架3下端,端盖75与电机外壳1之间、电机外壳1与驱动电机2之间、驱动电机2和固定架3之间采用o型密封圈实现静密封,蜗杆14上端与密封端盖i13之间采用油封i12实现动密封,固定架3的侧面开设圆形开口用于蜗轮11穿过,圆形开口圆周上加工有凹槽38,用于安装o型密封圈。
59.如图6和图7所示,本实施例中以第四调节模块为例说明调节模块的结构,第四调节模块69包括调节浮力的伸缩筒、传动轴17、套设于传动轴17上且与蜗杆14啮合的蜗轮11;伸缩筒包括滑动筒8和套设于滑动筒8外侧的固定筒9,固定筒9通过螺栓安装在连接法兰4上并用o型密封圈密封,滑动筒8部分嵌套于固定筒9右端,波纹管5左端通过螺栓、固定环78与固定筒9左端连接,波纹管5右端通过紧固法兰18、螺栓与滑动筒8右端连接,滑动筒8右端端面通过螺栓固定连接有筒端盖6,筒端盖6上开设有螺纹孔,水密电缆插座7与筒端盖6上的螺纹孔锁紧,水密电缆插座7用于将装置中的电缆接出,并防止水进入装置,固定筒9内设置支架61,支架61通过螺栓安装在固定筒9横截面上,支架61上通过螺栓固定安装有拉绳传感器60,拉绳传感器60的拉绳末端与滑动筒8的右端面内侧固定连接,支架61上还通过螺栓安装有单片机62,用于调节模块的控制和信息的接收,滑动筒8通过连接装置与传动轴17连接,连接装置包括第一连接组件76和第二连接组件77,第一连接组件76包括第一柔性臂10,滑动筒8右端面内侧固定连接有推杆47,推杆47右端与滑动筒8端面固定连接,推杆47左端通过螺栓与第一柔性臂10固定。
60.传动轴17安装在固定筒9左端端面,传动轴17延伸方向垂直于滑动筒8的滑动方向,且传动轴17绕轴线相对固定筒9转动,蜗轮11、第二花键齿轮21、第二固定外壳23、第一花键齿轮25均套设于传动轴17上,蜗轮11一部分位于固定筒9外,另一部分位于固定筒9内,且位于固定筒9端面与支架61之间。
61.如图8和图9所示,第一固定外壳29和第二固定外壳23通过角件48固定在连接法兰4上,且第一固定外壳29和第二固定外壳23均套设在传动轴17上。第二固定外壳23下端开口,用于第二柔性臂30穿过,第一固定外壳29上端开口,用于第一柔性臂10穿过。第一固定外壳29和第二固定外壳23分别位于蜗轮11两侧。
62.传动轴17两端通过滑动轴承ii37、滑动轴承iv81和轴肩固定安装于密封端盖iv80和密封端盖ii35上,密封端盖iv80和密封端盖ii35通过螺栓固定在连接法兰4上,传动轴17右端与密封端盖iv80之间采用油封iii72实现动密封,传动轴17左端与密封端盖ii35之间采用油封ii36实现动密封,蜗轮11通过双列圆锥滚子轴承i16套设在传动轴17上,双列圆锥滚子轴承i16通过传动轴17的轴肩和轴套iii84固定套设于传动轴17上。
63.蜗轮11一侧设置与第一花键齿轮25大小形状相同的凹槽,凹槽侧面设置花键齿,且凹槽底面设置电磁控制装置28,电磁控制装置28通过线圈外壳27和螺栓固定在蜗轮11的凹槽底面,第一花键齿轮25靠近蜗轮11一侧设置磁性金属26,在本实施例中磁性金属26采用衔铁,第一花键齿轮25另一侧与第二传动齿轮22之间设置弹性部件24,在本实施例中,弹性部件24采用板状弹簧,板状弹簧右端通过弹簧螺钉32与第二传动齿轮22连接,第一花键齿轮25和磁性金属26通过滑杆20与板状弹簧24左端连接,第一花键齿轮25通过滑杆20与第二花键齿轮21固定连接,滑杆20穿过第二传动齿轮22,滑杆20相对第二传动齿轮22周向定位,并相对第二传动齿轮22轴向滑动,滑杆20左端与磁性金属26和第一花键齿轮25连接,滑杆20右端通过卡簧54与第二花键齿轮21固定连接,第二固定外壳23围绕传动轴17开设圆槽,圆槽侧壁设置花键齿。
64.电磁控制装置28得电时吸附磁性金属26,第一花键齿轮25和第二花键齿轮21左移,弹性部件24产生形变,第一花键齿轮25与蜗轮11凹槽内的花键齿啮合,此时蜗轮11转动带动第一花键齿轮25转动,第一花键齿轮25通过滑杆20带动第二传动齿轮22转动,第二传动齿轮22带动传动轴17转动;电磁控制装置28失电时,弹性部件24恢复形状,第一花键齿轮25和第二花键齿轮21右移,第一花键齿轮25脱离蜗轮11的凹槽,第二花键齿轮21与第二固定外壳23圆槽内的花键齿啮合,实现传动轴17的锁定。
65.如图10所示,第一连接组件76包括第一传动齿轮31、传动齿轮轴39、第一齿轮40、第二齿轮33、第一柔性臂10,电滑环42通过平键15与传动轴17固定连接,电滑环42通过螺栓固定在第一固定外壳29上,第二齿轮33套设于传动轴17上,通过平键与传动轴17连接,并通过轴套ii83和轴肩固定在传动轴17上,第一齿轮40通过平键与传动齿轮轴39连接,并通过卡簧和轴肩安装固定在传动齿轮轴39上,第一齿轮40和第二齿轮33相互外啮合。传动齿轮轴39包括轴部和齿部,轴部延伸方向与齿部齿轮的中心轴线重合,第一齿轮40固定套设于齿轮传动轴39轴部上,传动齿轮轴39轴部通过双列圆锥滚子轴承ii41安装在第一固定外壳29上,并通过卡簧54和传动齿轮轴39轴部的轴肩固定在第一固定外壳29上,第一传动齿轮31通过深沟球轴承34套设在传动轴17上,并通过轴套i82、内卡簧59和轴肩与传动轴17轴向固定,第一传动齿轮31围绕传动轴17开设有齿轮槽,齿轮传动轴39的齿部与第一传动齿轮31的齿轮槽相互啮合,并满足齿数关系:第一齿轮40的齿数
×
第一传动齿轮31齿轮槽齿数=第二齿轮33齿数齿轮传动轴39齿部的齿数。
66.如图11至图14所示,第二连接组件77包括第二传动齿轮22、第二柔性臂30,第二传动齿轮22通过平键套设在传动轴17上,并通过轴套iv85和轴肩固定。第二柔性臂30一端的
端链节44通过圆柱销46与第二传动齿轮22连接,另一端端链节通过圆柱销与滑动筒8上的推杆47固定连接,第二柔性臂30部分容纳于第二固定外壳23内,并绕在第二传动齿轮22上,第二柔性臂30包括若干依次铰接的链节、设置于链节上的自锁装置,第二传动齿轮22沿第一方向转动时,第二传动齿轮22接触第二柔性臂30,制动板45转动,将自锁装置解锁,链节之间相互转动,使第二柔性臂30缠绕在第二传动齿轮22上;第二传动齿轮22沿第二方向转动时,第二柔性臂30离开第二传动齿轮22,链节通过自锁装置自锁,链节之间不再相互转动,滑杆20与弹簧螺钉32在第二传动齿轮22上周向交叉布置。
67.如图15至图18所示,第二柔性臂30中的一个链节,包括面对面设置的第一链节板87和第二链节板88,第一链节板87和第二链节板88中间上下两端分别通过两个滚子轴51连接,两个滚子轴51上均套设有滚子43,滚子43位于第一链节板87和第二链节板88之间,并通过卡簧、垫片i89和垫片ii90固定,且滚子43边缘位于第一链节板87和第二链节板88边缘外侧,第二柔性臂30缠绕在第二传动齿轮22上时,链节靠近第二传动齿轮22一侧的滚子43位于第二传动齿轮22的齿槽内。
68.如图19和图21所示,自锁装置主要包括棘轮55、棘轮轴53、容纳棘轮55的棘轮外壳52、弹簧片58、棘齿57、制动板45等,棘轮外壳52通过螺栓固定在前链节50的链节板上,棘轮55设置在棘轮外壳52内,棘轮55和棘轮外壳52通过平键与棘轮轴53连接,自锁装置设置在两个链节前链节50和后链节56之间,前链节50后端和后链节56前端通过棘轮轴53铰接,并通过卡簧固定,棘轮轴53与后链节56通过平键固定连接,棘轮55转动带动棘轮轴53转动,棘轮轴53带动后链节56转动,棘齿57一端压在棘轮55的齿上,棘齿57另一端与制动件45固定连接,弹簧片58一端压在棘齿57上,向棘齿57施加力,防止棘齿57脱离棘轮55,弹簧片58另一端通过螺钉固定在棘轮外壳52上,制动件45包括制动连接杆和制动板,制动连接杆一端穿过前链节50与棘齿57固定连接,且通过卡簧与棘轮外壳52固定,制动连接杆另一端与制动板连接,制动板位于两个链节板的中间,制动板接触第二传动齿轮22时,第二传动齿轮22带动制动板转动,从而制动连接杆带动棘齿57转动,棘轮55自锁解除,棘轮轴53方可转动,棘齿57脱离棘轮55。
69.如图22和图23所示,前链节50的第一链节板87和第二链节板88均设置自锁装置,且第一链节板87和第二链节板88上自锁装置的棘轮55旋转方向相反,第一链节板87的自锁装置限制后链节56绕前链节50顺时针旋转,第二链节板88的自锁装置限制后链节56绕前链节50逆时针旋转,从而,锁住后链节56,当制动板45动作时,棘齿57脱离棘轮55,后链节56可以绕前链节50自由转动。第一柔性臂10和第二柔性臂30的结构相同,在此不再赘述。自锁装置自锁灵活,能够高效实现柔性臂的卷曲和伸长运动,实现柔性臂刚性和柔性状态的变换。
70.上述欠驱动浮力调节装置的工作原理如下:
71.装置工作时,驱动电机2转动,带动蜗杆14旋转,蜗杆14带动蜗轮11旋转,当电磁控制装置28得电,吸附磁性金属26,带动与磁性金属26连接的第一花键齿轮25在电磁力的作用下与蜗轮11凹槽内的花键齿啮合,此时,第二花键齿轮21在滑杆20的带动向左滑移,解除与第二固定外壳23的内啮合,蜗轮11带动第二传动齿轮22转动,从而带动绕在第二传动齿轮22上的第二柔性臂30运动,同时第二传动齿轮22带动传动轴17转动,传动轴17带动第二齿轮33转动,第二齿轮33带动第一齿轮40转动,第一齿轮40带动齿轮传动轴39转动,齿轮传动轴39带动第一传动齿轮31转动,第一传动齿轮31带动第一柔性臂10运动。由于第一传动
齿轮31与第二传动齿轮22转速相同,转向相反,所以第一柔性臂10和第二柔性臂30同步带动滑动筒8在固定筒9内滑动,滑动筒8带动波纹管5的伸缩,从而改变浮力大小。
72.当第一柔性臂10和第二柔性臂30收缩时,波纹管5收缩,第一传动齿轮31和第二传动齿轮22的外齿接触到制动板45,使得与制动板45固连的棘齿57顺时针转动,链节之间可相对转动,使得第一柔性臂10绕在第一传动齿轮31上,第二柔性臂30绕在第二传动齿轮22上;当第一柔性臂10和第二柔性臂30伸长时,波纹管5伸出,第一传动齿轮31和第二传动齿轮22的外齿接触不到制动板45,使得与制动板45固连的棘齿57无法转动,链节之间不可相对转动,使得第一柔性臂10和第二柔性臂30刚性伸长。
73.当电磁线圈28失电,与板状弹簧相连的第一花键齿轮25在弹簧力的作用下被拉回,滑杆20向右滑移带动第二花键齿轮21的花键齿与第二固定外壳23内的花键齿啮合,形成第一传动齿轮31和第二传动齿轮22的制动,从而使第一柔性臂10和第二柔性臂30停止运动。
74.实施例2
75.如图30所示,本实施例中一种欠驱动浮力调节装置的调节方法,以采用四个调节模块为例进行说明,包括以下步骤:
76.步骤1:采集欠驱动浮力调节装置的姿态信息;
77.步骤2:建立浮力调节装置空间坐标系oxyz:以动力模块65的几何中心作为坐标原点o,以蜗杆14轴线作为z轴,以第四调节模块69的中心轴线为x轴,以第一调节模块66的中心轴线为y轴;
78.步骤3:设定欠驱动浮力调节装置的目标姿态信息,得到调节需要的目标浮力fz、浮力矩m;
79.步骤4:将目标浮力f、浮力矩m向坐标轴进行分解,得到各坐标轴上的分力及分力距,根据得到的分力及分力距计算每个调节模块的调节量;
80.步骤5:根据计算的调节量对调节模块进行调节,使欠驱动浮力调节装置达到目标姿态。
81.如图24所示,本实施例中设定第一调节模块66、第二调节模块67、第三调节模块68、第四调节模块69的初始长度分别为l1、l2、l3、l4,半径分别为r1、r2、r3、r4,滑动筒等移动部件的重力分别为g1、g2、g3、g4。当第四调节模块向右移动δl4的距离时,重力矩增加δm
yg4
=g4δl4,浮力增加浮力矩增加所以净浮力矩增加
82.(1)在r1≠r2≠r3≠r4,g1≠g2≠g3≠g4情况下。
83.如图25所示,若在浮力不变的情况下,产生净浮力矩my,则第二调节模块伸长量为δl2,第四调节模块收缩量为δl4。第二调节模块浮力增加第四调节模块浮力增加第二调节模块重力矩增加δm
yg2
=-g2δl2,第四调节模块重力矩增加δm
yg4
=-g4δl4。第二调节模块浮力矩增加第四调节模块浮
力矩增加
84.则有方程组解此方程组得,
[0085][0086]
,所以,若在浮力不变的情况下,产生净浮力矩my,则第二调节模块伸长量为:
[0087][0088]
,δl2取正值,第四调节模块收缩量为:
[0089][0090]
,δl4取正值。
[0091]
如图26所示,若在保证浮力矩不变的情况下,产生fz的浮力,则第二调节模块伸长量为δl2,第四调节模块伸长量为δl4。第二调节模块浮力增加第四调节模块浮力增加第二调节模块重力矩增加δm
yg2
=-g2δl2,第四调节模块重力矩增加δm
yg4
=g4δl4。第二调节模块浮力矩增加第四调节模块浮力矩增加
[0092]
有方程组解此方程组得,
[0093][0094]
所以,在保证浮力矩不变的情况下,产生fz的浮力,则第二调节模块伸长量为:
[0095][0096]
δl2取正值,第四调节模块伸长量为:
[0097][0098]
δl4取正值。
[0099]
如图27所示,若在浮力不变的情况下,产生净浮力矩m
x
,则第一调节模块伸长量为δl1,第三调节模块收缩量为δl3。第一调节模块浮力增加第三调节模块浮力增加第一调节模块重力矩增加3m
yg1
=-g1δl1,第三调节模块重力矩增加δm
yg3
=-g3δl3。第一调节模块浮力矩增加第三调节模块浮力矩
增加
[0100]
则有方程组
[0101]
解此方程组得,
[0102][0103]
,所以,若在浮力不变的情况下,产生净浮力矩m
x
,则第一调节模块伸长量为:
[0104][0105]
,δl1取正值,第三调节模块收缩量为:
[0106][0107]
,δl3取正值。
[0108]
如图28所示,若在保证浮力矩不变的情况下,产生fz的浮力,则第一调节模块伸长量为δl1,第四调节模块伸长量为δl3。第一调节模块浮力增加第三调节模块浮力增加第一调节模块重力矩增加δm
yg1
=-g1δl1,第三调节模块重力矩增加δm
yg3
=g3δl3。第一调节模块浮力矩增加第三调节模块浮力矩增加
[0109]
则有方程组
[0110]
解此方程组得,
[0111][0112]
所以,在保证浮力矩不变的情况下,产生fz的浮力,则第一调节模块伸长量为:
[0113][0114]
δl1取正值,第三调节模块伸长量为:
[0115][0116]
δl3取正值。
[0117]
(2)在r1=r2=r3=r4=r,g1=g2=g3=g4=g情况下。
[0118]
如图25所示,若在浮力不变的情况下,产生净浮力矩my,此时,解方程组
[0119]
得,
[0120]
所以,若在浮力不变的情况下,产生净浮力矩my,则第二调节模块伸长量为:第四调节模块收缩量为:
[0121]
如图26所示,若在保证浮力矩不变的情况下,产生fz的浮力,此时,解方程组得,
[0122]
所以,在保证浮力矩不变的情况下,产生fz的浮力,则第二调节模块伸长量为:第四调节模块伸长量为:
[0123]
如图27所示,若在浮力不变的情况下,产生净浮力矩m
x
,此时,解方程组得,
[0124]
所以,若在浮力不变的情况下,产生净浮力矩m
x
,则第一调节模块伸长量为:第三调节模块收缩量为:
[0125][0126]
如图28所示,若在保证浮力矩不变的情况下,产生fz的浮力,此时,解方程组得,
[0127]
所以,在保证浮力矩不变的情况下,产生fz的浮力,则第一调节模块伸长量为第三调节模块伸长量为
[0128]
如图29所示,若使得浮力调节装置产生fz的浮力,m的浮力矩,其中,m的方向与x正向轴的夹角为β,则浮力调节装置在x轴方向上产生在y轴方向上产生在x轴方向上产生my=m sinβ的净浮力矩,在y轴方向上产生m
x
=m cosβ的净浮力矩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1