集装箱运输船和集装箱的搬运方法与流程
1.本发明涉及一种集装箱运输船(container transportation ship)和集装箱的搬运方法。
背景技术:
2.已知一种将配置在集装箱码头(container terminal)的多个集装箱搬运到集装箱运输船上的搬运方法(例如,专利文献1)。在该搬运方法中,连续地进行第1工序、第2工序和第3工序,其中,在所述第1工序中,利用堆场起重机(yard crane)将集装箱装载到搬运车辆上;在所述第2工序中,将配置有集装箱的搬运车辆停靠到集装箱运输船上;在所述第3工序中,利用龙门起重机(gantry crane)将集装箱搬运到集装箱运输船内。通过在高度方向上堆垛多层集装箱,能够装载较多的集装箱。[现有技术文献][专利文献]
[0003]
专利文献1:日本发明专利公开公报特开2019-210113号
技术实现要素:
[发明要解决的技术问题]
[0004]
若使用现有技术中的搬运方法,由于利用多台龙门起重机进行数千个集装箱的卸货,因此存在要完成所有的集装箱的搬运需要较长的时间这一问题。用龙门起重机吊起集装箱,将集装箱设置在集装箱运输船的规定位置,然后,返回到搬运车辆的等待位置为止期间,下一辆装有集装箱的搬运车辆必须在等待位置等待。由于要搬运数千个集装箱,因此,该等待时间较长,从而整个装卸时间也变长。另外,由于操作龙门起重机需要熟练的技术,因此存在对操作人员有限制这一问题。
[0005]
另外,由于堆垛有多层集装箱,因此,在停泊港内要搬运的集装箱上装载有不用搬运的集装箱的情况下,会产生暂时搬运上层的集装箱之后,搬运下层的集装箱,再重新设置上层的集装箱这种转堆工序,从而还会产生整个装卸时间变长这一问题。
[0006]
另外,为了提高港口的装卸能力或者建设新的集装箱码头,必须增设或新设龙门起重机,但需要龙门起重机的购买费用、能够承载龙门起重机设置的地基维护费用等巨大的初始投资。另外,集装箱运输船只能在设置有与其尺寸相符的龙门起重机的港口进港,从而在现有的运输系统中,存在限定能够进行装卸的港口,物流效率降低这一问题。
[0007]
本发明是为了解决所述技术问题而提出的,其涉及一种能易于在短时间内搬运集装箱的集装箱运输船和集装箱的搬运方法。[用于解决技术问题的技术方案]
[0008]
为了解决所述技术问题,本发明的集装箱运输船的特征在于,具有集装箱设置空间、集装箱设置机构、搬运通道、船内坡道以及侧坡道(side rampway)和船尾坡道(stern rampway)中的至少一方,其中,所述集装箱设置空间在船体的全长方向、宽度方向和高度方
向上被设置多个,用于设置集装箱;所述集装箱设置机构分别被设置于所述集装箱设置空间,用于设置所述集装箱;所述搬运通道用于集装箱搬运装置通行,所述集装箱搬运装置用于搬运所述集装箱;所述船内坡道用于使所述集装箱搬运装置沿船体的高度方向移动;所述侧坡道和船尾坡道中的至少一方用于所述集装箱搬运装置往返于船体内外。
[0009]
另外,本发明是一种集装箱的搬运方法,用于将多个集装箱搬运到集装箱运输船内,其特征在于,包括装载工序、搬运工序、设置工序和移动工序,其中,在所述装载工序中,将配置在船外的集装箱装载于集装箱搬运装置;在所述搬运工序中,利用多个所述集装箱搬运装置将所述集装箱搬运到所述集装箱运输船内;在所述设置工序中,利用分别设置在用于设置所述集装箱的多个集装箱设置空间的集装箱设置机构来设置所述集装箱;在所述移动工序中,在所述设置工序之后,使清空的所述集装箱搬运装置移动到船外,在集装箱运输船的全长方向、宽度方向和高度方向上设置多个所述集装箱设置空间。
[0010]
根据所述结构,利用多个集装箱搬运装置向设置于船体的多个集装箱设置空间连续地搬运集装箱,因此能缩短集装箱的搬运作业过程,并且能消除或者缩短搬运时的等待时间。据此,能缩短集装箱的装卸时间。
[0011]
另外,根据本发明,由于能在集装箱设置空间单独地设置集装箱,因此,例如通过使用搭载于船内的集装箱搬运装置在航海中移动集装箱的位置,由此可省去装卸时的集装箱转堆作业,从而实现装卸时间的缩短。另外,根据本发明,不需要用于设置集装箱的龙门起重机那样的设备,只要具有用于使集装箱搬运装置往返于船体内外的船尾坡道或者侧坡道能停靠的设备,就能充分地进行装卸作业,因此能抑制初始投资,而相对于现有的港口进行集装箱装卸。
[0012]
另外,根据本发明,由于使集装箱搬运到集装箱搬运装置,因此不需要龙门起重机那样的大型机构,从而也不会受操作人员的技术的限制。
[0013]
另外,优选所述集装箱设置机构为集装箱支撑件,该集装箱支撑件被设置于所述集装箱设置空间,用于设置所述集装箱。另外,优选所述集装箱设置空间具有底部、多个支柱和顶部,所述集装箱支撑件具有从多个所述支柱分别向内侧伸出的多个伸出部。
[0014]
根据所述结构,只需在集装箱支撑件上设置集装箱,就能易于将集装箱设置在船内。[发明效果]
[0015]
根据本发明的集装箱运输船和集装箱的搬运方法,能易于在较短的装卸时间内搬运集装箱。
附图说明
[0016]
图1是表示本发明的实施方式所涉及的集装箱运输船的概略侧视图。图2是图1的ii-ii向视剖视图。图3是表示本实施方式所涉及的集装箱设置空间的纵剖视图。图4是表示本实施方式所涉及的集装箱设置空间的侧剖视图。图5是表示本实施方式所涉及的集装箱搬运装置的立体图。图6是表示本实施方式所涉及的设置工序的纵剖视图。
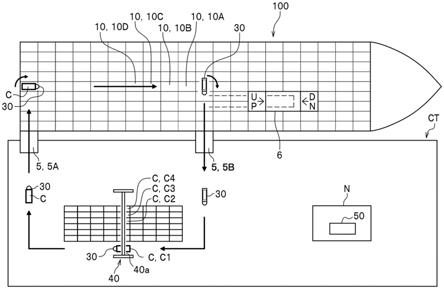
图7是表示本实施方式所涉及的集装箱的搬运系统的框图。图8是表示本实施方式所涉及的集装箱的搬运系统和集装箱的搬运方法的概略俯视图。图9是表示本实施方式所涉及的集装箱的搬运方法的流程图。[附图标记说明]100:集装箱运输船;1:主体部;2:居住部;3推进部;5a:船尾坡道;5b:侧坡道;6:船内坡道;10:集装箱设置空间;21:底部;18:支柱;23:顶部;24:伸出部;c:集装箱。
具体实施方式
[0017]
接着,一边参照适当的附图,一边对本发明的实施方式所涉及的集装箱运输船、集装箱的搬运系统和集装箱的搬运方法详细地进行说明。如图1、图2所示,本实施方式所涉及的集装箱运输船100是用于运输多个集装箱c的船舶。
[0018]
集装箱运输船100主要具有主体部1、居住部2和推进部3。主体部1是占据船体的大部分的部分,且是设有多个用于设置集装箱c的集装箱设置空间10的部位。居住部2是作为船员居住的居住区的部位。推进部3是作为用于使船体推进的驱动源的部位。推进部3可以是使用电池的驱动方式,也可以是由螺旋桨(screw)和发动机(engine)构成的驱动方式。
[0019]
在船体的船舷上设置有用于连接船内和船外的连接倾斜通道5(船尾坡道(stern rampway)5a和侧坡道(side rampway)5b)。船尾坡道5a和侧坡道5b是用于供后述的集装箱搬运装置30进出船体内外的出入口。在进行集装箱c的装卸的情况下,放下船尾坡道5a和侧坡道5b来与码头连接,在出航时折拢船尾坡道5a和侧坡道5b。此外,在本实施方式中,设置有船尾坡道5a和侧坡道5b,但并不限定其数量。可以为具有船尾坡道5a和侧坡道5b中的至少一个的方式。
[0020]
如图8所示,在主体部1的内部设置有船内坡道6。船内坡道6是用于使后述的集装箱搬运装置30在上层的甲板和下层的甲板上升降的道路。船内坡道6与后述的各甲板的搬运通道25连通。在本实施方式中,船内坡道6设置在一处,但也可以设置在多处,还可以设置在任意位置。
[0021]
如图1和图2所示,集装箱设置空间10是用于设置集装箱c的空间,在主体部1的内部,沿全长方向、宽度方向和高度方向呈格子状设置有多个。图1和图2中描绘的集装箱设置空间10的个数仅是例示,并不限定其个数。如图3和图4所示,集装箱设置空间10由多个支柱18、底部21和顶部23包围而构成,它们也可以由船体结构的一部分构成。
[0022]
在船体上,底部21与顶部23沿着全长方向、宽度方向延伸,且以连接这些底部21与顶部23的方式设置有多个支柱18。在相邻的支柱18彼此之间设置有伸出部24。在集装箱设置空间10的周围未设置有分隔壁而是连通的。即,相邻的集装箱设置空间10、10彼此连通。
[0023]
底部21形成集装箱设置空间10的下部,并且是用于后述的集装箱搬运装置30通行的部位。底部21兼用作下一层的集装箱设置空间10的顶部。在构成集装箱设置空间10的四个支柱18上分别形成有朝向内侧伸出的伸出部24。四个伸出部24是支撑集装箱c的四角的部位。此外,在本实施方式中利用四个伸出部24支撑集装箱c,但只要能支撑集装箱c,并不限制个数。
[0024]
由于利用伸出部24支撑集装箱c,因此,伸出部24、24之间的最短距离比集装箱c的
全长方向上的尺寸和宽度方向上的尺寸短。在本实施方式中,伸出部24的截面形状形成为,在全长方向上的截面为长方形,在宽度方向上的截面为三角形,但只要能设置集装箱c也可以为其他形状。由四个伸出部24构成设置集装箱c的“集装箱支撑件(集装箱设置机构)”。顶部23是与集装箱c的上表面隔开间隙地平行配置的部位。顶部23兼用作上一层的集装箱设置空间10的底部21。
[0025]
顶部23的上表面成为兼用作上一层的集装箱设置空间10的底部21的甲板,在顶部23的下表面,与集装箱c的上表面隔开足够间隙地配置有支撑甲板且沿全长方向纵向贯穿的龙骨(keel)g1、肋材(frame)h1(纵梁、斜梁),用于支撑这些龙骨g1、肋材h1且沿宽度方向配置的肋材h2与支柱18等间隔地配置。通常,在设置有船内坡道的船中,有时为了提高货物的搬入搬出的自由度,尽可能地减少支柱、分隔壁等结构部件,其结果,用于支撑甲板的龙骨、肋材大型化,而牺牲船内的高度方向上的空间。
[0026]
关于这一点,在本实施方式中,由于用于设置集装箱的支柱18呈格子状密集地设置在船内,因此,与通常的设置有船内坡道的船相比,能减小龙骨g1、肋材h1、h2在高度方向上的尺寸,从而更有效地利用船内空间,或者通过使设置集装箱的甲板层从底部21到顶部23的距离为最小限度,而能将船自身的高度抑制得较低。此外,由于后述的集装箱搬运装置30具有可向全长方向和宽度方向自由移动的机构,因此无需减少支柱等结构部件,支柱18、龙骨g1、肋材h1、h2只要能配置为不与移动路径干涉即可。
[0027]
集装箱设置空间10中的比伸出部24靠下的空间成为搬运通道25。搬运通道25是用于后述的集装箱搬运装置30通行的空间。伸出部24的形状和高度位置(搬运通道25的高度尺寸)形成为不与设置有集装箱c的集装箱搬运装置30干涉。搬运通道25在船体的全长方向和宽度方向上呈直线状连续地形成。即,集装箱搬运装置30通过搬运通道25,由此能在船体的全长方向和宽度方向上移动,从而能高效地到达船尾坡道5a或者侧坡道5b。
[0028]
图5是表示本实施方式所涉及的集装箱搬运装置的立体图。如图5所示,集装箱搬运装置30是用于通过船尾坡道5a或侧坡道5b、船内坡道6、搬运通道25而将集装箱c从集装箱码头ct搬运到集装箱运输船100的装置。另外,集装箱搬运装置30是在将集装箱c设置在集装箱运输船100内之后,通过搬运通道25、船内坡道6、船尾坡道5a或侧坡道5b而以清空的状态返回到集装箱码头ct的装置。
[0029]
此外,在本实施方式中,集装箱搬运装置30是通过无人方式运转的,但也可以通过有人方式运转。另外,在本实施方式中,集装箱搬运装置30是利用电池进行运转的,但也可以为利用其他驱动源进行运转的方式。
[0030]
集装箱搬运装置30具有主体31、多个轮胎32、控制部33和提升部34。主体31具有能搬运集装箱c的宽度和长度。在主体31的内部搭载有用于驱动集装箱搬运装置30的电池等。控制部33是用于控制集装箱搬运装置30的部位,且具有能与控制装置50进行控制信号的收发的通信部。
[0031]
提升部34是用于装载集装箱c的部位,并且是能使集装箱c相对于主体31升降的部位。即,当使提升部34上升时,集装箱c上升数十厘米左右,当使提升部34下降时,集装箱c返回到原来的高度位置。该原来的高度位置被设定在比伸出部24的上表面低的位置。提升部34的全长尺寸和宽度尺寸比伸出部24、24之间(全长方向和宽度方向之间)的各最短距离短。
[0032]
如图6所示,将集装箱c设置在集装箱设置空间10的情况(设置工序)是指使提升部34在上升的状态下进入集装箱设置空间10,并使集装箱搬运装置30停止。然后,仅通过使提升部34下降,就能将集装箱c设置在四个伸出部24上。更详细而言,使提升部34下降直到提升部34的上表面位于比伸出部24、24的上表面靠下方的位置,将集装箱c设置在四个伸出部24上。
[0033]
集装箱搬运装置30可以构成为除了沿前方或后方转动之外,还沿左右方向转动。另外,例如,可以是像在材料搬运(material handling)中使用的搬运装置(搬运车辆、搬运机器人)那样,除了前进、后退之外,还构成为能沿正横向方向移动。另外,可以使用多个搬运装置来搬运一个集装箱c。
[0034]
接着,对本实施方式所涉及的集装箱的搬运系统200和集装箱的搬运方法进行说明。如图7和图8所示,集装箱的搬运系统200是将装载在集装箱码头ct上的多个集装箱c自动搬运到集装箱运输船100上的系统。如图7所示,搬运系统200具有多个集装箱搬运装置30(30a、30b
···
30n)、堆场起重机40和控制装置50。
[0035]
在此,例示将装载于图8的集装箱码头ct的集装箱c1、c2、c3、c4分别搬运到设于船内的集装箱设置空间10a、10b、10c、10d的情况。
[0036]
如图7和图8所示,控制装置50被设置在控制室n,该控制室n被设置于集装箱码头ct。控制装置50具有运算部51(cpu(central processing unit))、键盘、触摸面板等输入部52、监视器、显示器等显示部53、ssd(solid state drive)、hdd(hard disk drive)、ram(random access memory)、rom(read only memory)等存储部54。另外,控制装置50具有能与各集装箱搬运装置30之间收发控制信号的通信部。在存储部54中例如存储有搬运程序55。
[0037]
搬运程序55是用于将各集装箱搬运装置30搬运到预先设定的规定的集装箱设置空间10的程序。预先设定被装载于集装箱码头ct的各集装箱c设置于船体的哪个集装箱设置空间10。如图8所示,例如,预先设定为:将集装箱c1设置于集装箱设置空间10a、将集装箱c2设置于集装箱设置空间10b、将集装箱c3设置于集装箱设置空间10c、将集装箱c4设置于集装箱设置空间10d。
[0038]
在搬运系统200中,通过控制装置50执行搬运程序55,如图9所示,进行装载工序(s1)、搬运工序(s2)、设置工序(s3)和移动工序(s4)。
[0039]
装载工序(s1)是利用堆场起重机40将集装箱c装载到集装箱搬运装置30上的工序。集装箱搬运装置30在设定于堆场起重机40的下方的集装箱接收位置40a处等待。利用堆场起重机40吊起集装箱c1,将集装箱c1装载于集装箱搬运装置30,并且以集装箱搬运装置30与集装箱c1成为锁定状态为契机,启动集装箱搬运装置30。
[0040]
此外,在本实施方式中,堆场起重机40通过操作人员进行操作来将集装箱c装载到集装箱搬运装置30上,但并不限定于此。例如,可以为:在堆场起重机40上设置读取部,读取赋予集装箱c的集装箱识别信息(集装箱编号、二维码(条形码、qr码)等),以无人(自动)方式进行规定的集装箱c的吊起作业和向集装箱搬运装置30的装载作业。
[0041]
搬运工序(s2)使用装载有集装箱c的集装箱搬运装置30来将集装箱c搬运到预先设定的集装箱设置空间10的工序。即,在集装箱c1的情况下,搬运工序是将集装箱c1从集装箱接收位置40a经由船尾坡道5a搬运到集装箱设置空间10a的工序。预先设定集装箱搬运装
置30的行驶路径,集装箱搬运装置30沿着该行驶路径以自动(无人)方式行驶。
[0042]
首先,集装箱搬运装置30将集装箱c从集装箱接收位置40a向规定的搬运通道25进行搬运。在集装箱c1的情况下,集装箱搬运装置30在与集装箱设置空间10a对应的搬运通道25(例如,n层的从左起第n个搬运通道)通行。
[0043]
接着,集装箱搬运装置30在规定的集装箱设置空间10停止。在集装箱c1的情况下,集装箱搬运装置30在集装箱设置空间10a的中央停止(图6的状态)。
[0044]
设置工序(s3)是利用分别设于集装箱设置空间10的集装箱设置机构(四个伸出部24)来设置集装箱c的工序。集装箱搬运装置30以到达集装箱设置空间10为契机,使提升部34下降。据此,集装箱c被设置于伸出部24。在本实施方式中,集装箱c1被设置于集装箱设置空间10a的伸出部24。
[0045]
移动工序(s4)是在设置工序之后,将清空的集装箱搬运装置30移动到船外的工序。在移动工序中,集装箱搬运装置30以使提升部34下降到最低位置(设置了集装箱c)为契机,在全长方向或宽度方向上不受限制地通过搬运通道25,经由船内坡道6、侧坡道5b再次返回到集装箱接收位置40a。空载的集装箱搬运装置30能通过与载货状态的集装箱搬运装置30不同的路径,因此能像汽车运输船的汽车那样连续地搬运集装箱c。
[0046]
从侧坡道5b到集装箱接收位置40a的行驶路径也被预先设定,集装箱搬运装置30沿着该行驶路径行驶。到此为止是集装箱搬运装置30的1个作业过程。在本实施方式中,使用多台集装箱搬运装置30(30a,30b
···
30n)连续地进行该作业过程。据此,能将集装箱c2,c3,c4分别连续地搬运到集装箱设置空间10b,10c,10d。
[0047]
此外,在将设置于集装箱设置空间10的集装箱c从船内搬运到船外的情况下,在使提升部34下降的状态下,使清空的集装箱搬运装置30移动到规定的集装箱设置空间10并停止。然后,使提升部34上升,从而使集装箱c与伸出部24分离。在保持该状态下,利用集装箱搬运装置30在搬运通道25中行驶,就能将该集装箱c搬运到船外。
[0048]
另外,可以为:在集装箱设置空间10设置读取部和传感器,读取赋予各集装箱搬运装置30或各集装箱c的识别信息(集装箱搬运装置编号、集装箱编号、二维码(条形码、qr码)等)来进行集装箱c与搬运目的地的匹配。另外,可以设置传感器来判定集装箱搬运装置30是否到达了规定位置。
[0049]
根据上面说明的本实施方式所涉及的集装箱运输船、集装箱的搬运系统和集装箱的搬运方法,通过利用多台集装箱搬运装置30来连续地进行该搬运作业过程,能大幅度地缩短装卸时间。即,现有技术中,必须将搬运车辆等停靠于集装箱运输船100进行等待直到集装箱c被吊到船内,但在本实施方式中,由于能在装载有集装箱c的状态下进入船内,因此能消除或缩短等待时间。
[0050]
另外,由于利用集装箱搬运装置30搬运集装箱c,因此不需要龙门起重机。据此,不需要龙门起重机的购买费用、能够承载龙门起重机设置的地基维护费用等初始投资,因此能降低设备成本。另外,在现有技术中,集装箱运输船只能在设置有与其尺寸相符的龙门起重机的港口进港,但若为本实施方式,只要具有用于使集装箱搬运装置30往返于船体内外的船尾坡道5a或侧坡道5b能停靠的设备,则不会受到这种限制,从而能提高物流效率。
[0051]
另外,集装箱设置空间10由多个支柱18、底部21和顶部23构成,集装箱设置机构(集装箱支撑件)由从各支柱18分别向内侧伸出的四个伸出部24构成。根据所述结构,仅通
过在伸出部24设置集装箱c,就能易于将集装箱c设置在船内。另外,根据本实施方式的设置工序,仅通过从使集装箱c上升的状态起使提升部34下降,就能将集装箱c设置于伸出部24,因此,能易于在短时间内进行设置作业。另外,仅通过使提升部34从下降的状态起上升,就能易于在短时间内将设置于船内的集装箱c搬运到船外。
[0052]
另外,如图3和图4所示,提升部34的全长尺寸和宽度尺寸比伸出部24、24之间(全长方向和宽度方向之间)的各最短距离短。换言之,在全长方向和宽度方向上相邻的集装箱设置空间10、10之间,集装箱搬运装置30构成为可沿全长方向和宽度方向移动。据此,在装载集装箱c并使提升部34上升的状态下,能使集装箱搬运装置30在集装箱设置空间10、10之间的全长方向和宽度方向这两个方向上行驶。据此,能进一步提高搬运效率。
[0053]
另外,在现有技术中,由于堆垛多层集装箱c,因此,在停泊港内要搬运的集装箱c上装载有不用搬运的集装箱的情况下,会产生暂时搬运上层的集装箱之后,搬运下层的集装箱,再重新设置上层的集装箱这种转堆工序这一问题。但是,根据本实施方式,由于集装箱搬运装置30能在搬运通道25上沿全长方向和宽度方向行驶,因此仅进行用于确保集装箱搬运路径的转堆作业,就能将规定的集装箱c搬运到船外。据此,能提高装卸的作业效率。
[0054]
另外,根据本实施方式,由于集装箱设置空间10能单独地设置集装箱c,因此,例如,通过使用搭载于船内的集装箱搬运装置30来在航海中移动集装箱c的位置,能省去装卸时的集装箱转堆作业,从而能够实现装卸时间的缩短。另外,根据本实施方式,由于利用集装箱搬运装置30搬运集装箱c,因此不需要龙门起重机那样的大型机械,从而也不受操作人员的技术的限制。
[0055]
上面对本发明的实施方式进行了说明,但在不违背本发明的主旨的范围内能适当地进行设计变更。例如,可以通过使形成于集装箱c的卡合部与形成于集装箱设置空间10的被卡合部卡合或者解除其间卡合来构成集装箱设置机构。另外,集装箱设置机构可以构成为使用磁力来在集装箱设置空间10装卸集装箱c。
[0056]
另外,可以进行如下控制:在将船外的集装箱c设置于集装箱设置空间10之后,使清空的该集装箱搬运装置30移动至另一集装箱设置空间10,并将该位置的集装箱c运出船外。
[0057]
另外,所述搬运程序55仅是一个例子,也可以使用其他的控制方法来搬运集装箱c。另外,控制装置50与集装箱搬运装置30的通信可以通过因特网、内联网(intranet)等通信网络进行。即,控制装置50通过从记录介质读取搬运程序或者经由通信网络接收搬运程序,能获取并执行搬运程序。另外,可以为:在各集装箱搬运装置30上设置读取部,使赋予各集装箱c的识别信息(集装箱编号、二维码(条形码、qr码)等)与赋予集装箱搬运装置30的识别信息(集装箱搬运装置编号、二维码(条形码、qr码)等)建立关联,并与该集装箱搬运装置30的行驶记录一起存储于存储部54。据此,能易于进行集装箱c的搬运管理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1