主动捕获水下潜航器对接机构及其工作方法
1.本发明涉及水下对接技术领域,具体地,涉及主动捕获水下潜航器对接机构及其工作方法。尤其是一种基于六自由度并联机构的水下对接机构及其工作方法。
背景技术:
2.当前无人潜航器发挥其作用遇到的重大问题包括布放回收问题。由于auv自身携带的能源有限,在完成任务之后,需要定期返航回收,进行能源补给、数据维护、设备检修。而且布放回收auv的过程复杂,耗费人力物力,人工回收还面临海洋风浪的风险,不仅增加了auv的运行成本,还使得auv的作业范围受限。
3.传统的水下潜航器回收方式大多为被动式回收方式,通过水下潜航器自主导航运动至回收装置内,但由于auv的算力有限,以及复杂的水下环境干扰,auv返航的对接成功率、对接精度不够、自动化水平不高,水下对接系统固定平台的算力优势、主动优势没有发挥出来。亟需开发智能化的平台主动式水下对接技术,以备长期连续海洋勘探、海洋作战与布防。
4.经现有技术专利文献检索发现,中国发明专利公开号为cn106741758b,公开了一种具备大冗余度的水下对接机构,属于水下对接技术领域,达到克服相对位置和姿态误差的目的。包括2个对接套和驱动机构,2个对接套安装于水下作业驱动机构末端,2个对接套与驱动机构通过连接杆连接,驱动机构随水下移动体运动接近对接柄,驱动机构驱动2个对接套的开口使其形成合拢姿态对对接柄进行捕获;当对接套在驱动机构带动下达到和对接柄相对位置范围时,两个对接套相对合拢;当对接套的套口内壁与对接柄的柄体的边缘接触时,柄体的圆弧边缘将在套口的圆弧内壁或斜面内壁上滑动,并被导入到套口底端的槽口内。而本发明提供了主动捕获水下潜航器对接机构及其工作方法,解决auv返航的对接成功率、对接精度不够、自动化水平不高等问题。因此,该文献与本发明所介绍的方法是属于不同的发明构思。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种主动捕获水下潜航器对接机构及其工作方法。
6.根据本发明提供的一种主动捕获水下潜航器对接机构,包括夹持模块、六自由度并联机器人、水下基座、控制模块、蓄电池以及定位模块,控制模块连接六自由度并联机器人,六自由度并联机器人连接于水下基座上,水下基座上设有蓄电池,蓄电池连接定位模块,六自由度并联机器人顶部连接夹持模块;
7.夹持模块通过控制模块与六自由度并联机器人同步运动;定位模块可以获得水下潜航器的位姿信息,从而由控制模块相应地控制夹持模块的位姿,实现对水下潜航器的捕获和补能。
8.一些实施例中,夹持模块包括夹持装置、无线充电装置、电磁磁吸装置以及夹持基
座,夹持基座的中间连接有无线充电装置,夹持基座的侧边连接有夹持装置,电磁磁吸装置连接于夹持装置上。
9.一些实施例中,夹持装置包括夹持杆、夹持平台、传动杆、滑块以及夹持臂,夹持臂底部连接于夹持基座上,夹持臂顶部连接夹持平台,夹持平台上连接有夹持杆,夹持杆通过传动杆连接滑块,滑块连接于夹持臂上;
10.滑块在夹持臂上做直线运动,滑块通过传动杆控制夹持杆的张合。
11.一些实施例中,夹持杆的夹持工作端面与夹持杆上两孔轴线构成的平面呈30
°
角。
12.一些实施例中,电磁磁吸装置连接于夹持平台的中间;
13.当水下潜航器靠近夹持装置时,通过控制模块输出的电信号控制开启电磁磁吸装置,电磁磁吸装置实现准确吸附水下潜航器。
14.一些实施例中,滑块通过电机-丝杆螺母结构驱动,电机安装于夹持臂的下方,丝杆安装于夹持臂内,电机轴与丝杆通过联轴器相连,滑块固定在丝杆螺母的螺母上。
15.一些实施例中,夹持装置的数量大于等于2。
16.一些实施例中,定位模块包括双目视觉相机、声纳以及应答器的一种或多种;
17.当定位模块采用双目视觉相机时,水下潜航器上安装有多个led灯,定位模块通过led灯实时监测水下潜航器的位姿,将水下潜航器的位姿信息反馈给控制模块;
18.或者,当定位模块采用声纳和应答器进行组合定位时,声呐安装于水下基座上,应答器安装于水下潜航器上,通过监测声纳和应答器之间的声音传播时间,综合计算得到水下潜航器的位姿,水下潜航器的位姿信息反馈给控制模块。
19.一些实施例中,六自由度并联机器人、控制模块、蓄电池、定位模块安装在水下基座上,水下基座安装于海底或水下悬浮平台上,六自由度并联机器人、控制模块、定位模块由蓄电池供电,蓄电池由太阳能、波浪能发电装置充电。
20.本发明还提供了一种主动捕获水下潜航器对接机构的工作方法,包括以下步骤:
21.s1:水下潜航器返航至捕获工作空间内,定位模块获取水下潜航器的位姿,并将水下潜航器的位姿信息反馈给控制模块;
22.s2:根据水下潜航器的位姿,控制模块控制六自由度并联机器人的电机,使得夹持模块运动到水下潜航器的位姿;
23.s3:控制模块启动电磁磁吸装置,水下潜航器与夹持装置吸合到一起,控制模块控制夹持装置收合,实现对水下潜航器的捕获;
24.s4:控制模块控制六自由度并联机器人回归初始位姿,并打开无线充电装置,无线充电装置对水下潜航器进行补能。
25.与现有技术相比,本发明具有如下的有益效果:
26.1、本发明提供的主动捕获水下潜航器对接机构及其工作方法可以实现利用太阳能、波浪能等可再生能源实现自动化的水下潜航器捕获与能源供给,避免水下潜航器返航、回收和补能的繁琐流程,提高水下潜航器区域巡逻续航能力和长期服役能力;
27.2、本发明提供的主动捕获水下潜航器对接机构利用了六自由度并联机器人进行水下潜航器的捕获,具有系统响应快、动态性能好的优点,可实现水下潜航器在海流扰动下的捕获;还具有适应性强的优点,可以实现水下潜航器在一定范围内各种位姿的捕获;
28.3、本发明提供的夹持模块采用夹持装置结合电磁磁吸的方式,使得对接更加精
准,可有效地避免捕获过程中的对接位姿误差的影响;
29.4、本发明提出了采用六自由度并联机构及夹持装置为主的主动捕获方案,与传统的被动式水下潜航器捕获相比,用六自由度的捕获机构去适应水下机器人的姿态,具有原创特征和颠覆性意义。
附图说明
30.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
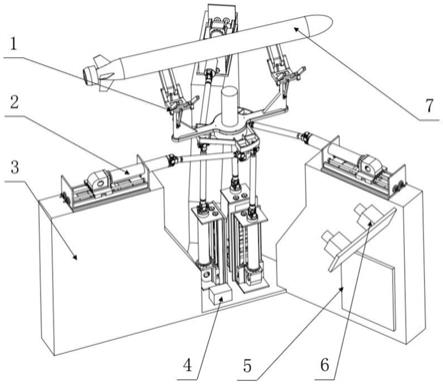
31.图1为本发明的主动捕获水下潜航器对接机构的整体结构示意图;
32.图2为本发明的主动捕获水下潜航器对接机构的夹持模块示意图;
33.图3为本发明的主动捕获水下潜航器对接机构的工作方法框图;
34.图中示出:
35.夹持模块1、夹持装置11、夹持杆111、夹持平台112、传动杆113、滑块114、夹持臂115、无线充电装置12、电磁磁吸装置13、夹持基座14、夹持臂115、六自由度并联机器人2、水下基座3、控制模块4、蓄电池5、定位模块6、水下潜航器7。
具体实施方式
36.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
37.实施例1
38.本发明提供的一种主动捕获水下潜航器对接机构,如图1所示,包括夹持模块1、六自由度并联机器人2、水下基座3、控制模块4、蓄电池5以及定位模块6,控制模块4连接六自由度并联机器人2,六自由度并联机器人2连接于水下基座3上,水下基座3上设有蓄电池5,蓄电池5连接定位模块6,六自由度并联机器人2顶部连接夹持模块1,夹持模块1通过控制模块4与六自由度并联机器人2同步运动。六自由度并联机器人2、控制模块4、蓄电池5、定位模块6安装在水下基座3上,水下基座3安装于海底或水下悬浮平台上,六自由度并联机器人2、控制模块4、定位模块6由蓄电池5供电,蓄电池5由太阳能、波浪能发电装置充电。六自由度并联机器人2由六个电机进行驱动,电机由蓄电池5供能,由控制模块4控制电机转动实现末端在工作空间内的任意位姿控制;六自由度并联机器人2在非工作状态下保持夹持模块1收回,不影响水下潜航器7返航到其上方区域。
39.如图2所示,夹持模块1包括夹持装置11、无线充电装置12、电磁磁吸装置13以及夹持基座14,夹持基座14的中间连接有无线充电装置12,无线充电装置12对准水下潜航器7的充电线圈。夹持基座14的侧边连接有两个及两个以上的夹持装置11。夹持装置11包括夹持杆111、夹持平台112、传动杆113、滑块114以及夹持臂115,夹持臂115底部连接于夹持基座14上,夹持臂115顶部连接夹持平台112,夹持平台112上连接有夹持杆111,优选的,夹持杆111的夹持工作端面与夹持杆111上两孔轴线构成的平面呈30
°
角。夹持杆111通过传动杆113连接滑块114,滑块114连接于夹持臂115上。优选的,滑块114通过电机-丝杆螺母结构驱
动,电机安装于夹持臂115的下方,丝杆安装于夹持臂115内,电机轴与丝杆通过联轴器相连,滑块114固定在丝杆螺母的螺母上。滑块114在夹持臂115上做直线运动,滑块114通过传动杆113控制夹持杆111的张合。电磁磁吸装置13连接于夹持平台112的中间;当水下潜航器7靠近夹持模块1时,通过控制模块4输出的电信号控制开启电磁磁吸装置13,电磁磁吸装置13实现准确吸附水下潜航器7。
40.定位模块6包括双目视觉相机、声纳以及应答器的一种或多种;
41.当定位模块6采用双目视觉相机时,水下潜航器7上安装有多个led灯,定位模块6通过led灯实时监测水下潜航器7的位姿,将水下潜航器7的位姿信息反馈给控制模块4;
42.或者,当定位模块6采用声纳和应答器进行组合定位时,三个及三个以上的声呐安装于水下基座3上,声呐间间隔数米。两个及两个以上的应答器安装于水下潜航器7上,通过监测声纳和应答器之间的声音传播时间,综合计算得到水下潜航器7的位姿,水下潜航器7的位姿信息反馈给控制模块4。
43.工作原理:夹持模块1通过控制模块4与六自由度并联机器人2同步运动;定位模块6可以获得水下潜航器7的位姿信息,从而由控制模块4相应地控制夹持模块1的位姿,实现对水下潜航器7的捕获和补能。
44.实施例2
45.本发明还提供了一种主动捕获水下潜航器对接机构的工作方法,如图3所示,包括以下步骤:
46.s1:水下潜航器7返航至捕获工作空间内,定位模块6获取水下潜航器7的位姿,并将水下潜航器7的位姿信息反馈给控制模块4;
47.s2:根据水下潜航器7的位姿,控制模块4控制六自由度并联机器人2的电机,使得夹持模块1运动到水下潜航器7的位姿;
48.s3:控制模块4启动电磁磁吸装置13,水下潜航器7与夹持装置11吸合到一起,控制模块4控制夹持装置11收合,实现对水下潜航器7的捕获;
49.s4:控制模块4控制六自由度并联机器人2回归初始位姿,并打开无线充电装置12,无线充电装置12对水下潜航器7进行补能。
50.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
51.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1