一种水下作业用上肢外骨骼机构
1.本发明涉及水下作业用机构的技术领域,具体涉及一种水下作业用上肢外骨骼机构。
背景技术:
2.海管铺设、水下检修、水下打捞、救援等水下作业都离不开潜水员的辛勤付出,为国家挽回的经济损失过千亿元。水下复杂环境对人体的身体素质要求高,潜水员的体力和速度限制是阻碍水下作业任务执行效率的重要因素。目前助力外骨骼机构技术多用于增强陆地上人体运动能力,人体上肢具备非常重要的作用,很多陆地/水下任务都离不开上肢,然而,然而,尚未有能够应用于水下作业方面的上肢外骨骼机构系统。针对水下作业环境,现有上肢外骨骼机构技术尚存在以下问题未能解决:现有助力外骨骼机机构多将电机布置于关节处,极大增加了上肢外骨骼本体部分重量,然而,水下作业时,上肢外骨骼本体部分重量将严重影响助力效果;以及现有助力外骨骼机构多用于增强陆地上人体运动能力,未考虑水下作业密封防水需求,电机、传动系统和电控系统均未做密封防水保护。
技术实现要素:
3.鉴于上述技术问题,本发明提出一种水下作业用上肢外骨骼机构,以改善现有结构存在的上肢外骨骼本体部分重量将严重影响助力效果、以及未考虑水下作业密封防水需求的问题。
4.为解决上述技术问题及实现其他相关目的,本发明提出一种水下作业用上肢外骨骼机构,包括:
5.密封箱体,其内形成有收容腔;
6.两个上肢外骨骼组件,其对称安装在所述密封箱体的两侧,所述上肢外骨骼组件包括:多个关节杆件和多个关节节点,相邻的两个关节杆件通过所述关节节点转动连接在一起,所述关节节点包括第一肩关节节点、第二肩关节节点和肘关节节点,且每个所述关节节点上均设置有密封结构;
7.多个驱动组件,设置在所述收容腔内,且与所述第一肩关节节点、所述第二肩关节节点和所述肘关节节点一一对应;
8.多个套索组件,每个所述关节节点和与其对应的所述驱动组件之间均设置有所述套索组件,所述套索组件包括第一套索和第二套索,所述第一套索和所述第二套索的一端连接在对应的所述关节节点上,另一端穿过所述密封箱体以连接在对应的所述驱动组件上,且所述第一套索和所述第二套索与所述密封箱体和所述关节节点的连接处均设置有密封结构,在所述驱动组件的正转或反转的驱动作用下,通过所述第一套索或所述第二套索带动所述关节节点的正转或反转。
9.在本发明的一个实施例中,所述关节杆件包括第一肩关节杆件和第二肩关节杆件,所述第一肩关节杆件固定安装在所述密封箱体上,所述第二肩关节组件的一端通过所
述第一肩关节节点与所述第一肩关节组件转动连接在一起。
10.在本发明的一个实施例中,所述第二肩关节杆件为弧形结构。
11.在本发明的一个实施例中,所述关节杆件还包括第一上臂杆件,其一端通过所述第二肩关节节点与所述第二肩关节杆件转动连接在一起。
12.在本发明的一个实施例中,所述关节杆件还包括第二上臂杆件,其一端设置为半圆形结构,所述半圆形结构的外圆周上设置有滑轨,与所述第一上臂杆件的另一端滑动连接。
13.在本发明的一个实施例中,所述关节杆件还包括下臂杆件,其一端通过所述肘关节节点与所述第二上臂杆件的另一端转动连接,且所述下臂杆件的另一端上设置有腕部自旋结构。
14.在本发明的一个实施例中,相邻的两个所述关节杆件之间的关节节点包括:
15.密封件,其内设置有容纳腔,并与其中一个关节杆件固定安装在一起;
16.转轴,转动安装在密封件内,其一端与另一关节杆件固定连接,另一端上安装有编码器和环形磁环,所述环形磁环位于所述转轴和所述编码器之间;
17.密封盖,与所述密封件固定连接,且罩设在所述编码器和所述环形磁环上方,且所述密封盖与所述密封件之间设置有第一密封圈;
18.螺旋缠绕轮,其安装在所述转轴上,并且位于所述容纳腔内;
19.端盖,其固定安装在所述密封件远离设置有所述密封盖的一侧上,且所述端盖与所述密封件之间设置有第二密封圈,且所述端盖与所述转轴的连接处设置有唇形密封圈,所述唇形密封圈套设在所述转轴上。
20.在本发明的一个实施例中,所述第一套索和所述第二套索的一端穿过所述密封件以和所述螺旋缠绕轮连接,通过所述第一套索和所述第二套索带动所述螺旋缠绕轮正转或反转。
21.在本发明的一个实施例中,所述第一套索和/或所述第二套索穿过所述密封箱体和所述密封件的连接处均设置的密封结构,包括:
22.沉孔,设置在所述密封箱体和/或所述密封件上;
23.密封座,其固定在所述第一套索和/或所述第二套索上,且位于所述沉孔内;
24.橡胶圈,套设在所述第一套索和/或所述第二套索上,且位于所述沉孔内,通过所述密封座的端面将其压紧在所述沉孔内;
25.第三密封圈,套设在所述密封座上,且位于所述沉孔的侧壁与所述密封座之间,填充所述密封座与所述沉孔之间的间隙。
26.在本发明的一个实施例中,所述密封箱体内设置有多个预紧组件,分别与多个所述驱动组件一一对应,所述预紧组件第一预紧件和第二预紧件,所述第一预紧件和所述第二预紧件的结构相同,其包括:安装座、螺钉和滑轮,所述安装座固定安装在所述密封箱体的内部,所述螺钉安装在所述安装座上,所述滑轮通过滑轮安装件与所述螺钉之间通过螺纹连接在一起,所述第一套索和所述第二套索分别绕设在所述第一预紧件和所述第二预紧件中的滑轮上,通过调整所述滑轮在所述螺钉上的位置以预紧所述第一套索和所述第二套索。
27.本发明提出一种水下作业用上肢外骨骼机构,通过将驱动组件安装在密封箱体
内,由于手臂本体部分并不包含电机、驱动器等部件,以使得手臂本体部分整体重量轻,有利于水下作业,且电机、驱动器、控制器等布置于防水背板里面,通过套索将能量传递到对应的六个主动运动关节,以实现助力。
28.本发明提出一种水下作业用上肢外骨骼机构,套索两端分别与关节节点内的螺旋缠绕轮和驱动组件中的螺旋缠绕轮连接,通过螺旋缠绕,增加摩擦力,防止打滑。
29.本发明提出一种水下作业用上肢外骨骼机构,通过在每个关节节点处设置编码器和环形磁环,用于测量主动关节角度,方便反馈关节运动角度,进而采用控制算法,控制关节运动按照预期轨迹运行。
30.本发明提出一种水下作业用上肢外骨骼机构,在各个关节节点处均设置有密封结构,同样的,在每个套索与密封箱体和关节节点的连接处均设置有密封结构,以及该外骨骼机构上每个螺栓连接处均设置有密封垫圈,以保证该结构的密封防水性能,从而保证其能够顺利在水下进行作业。
附图说明
31.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
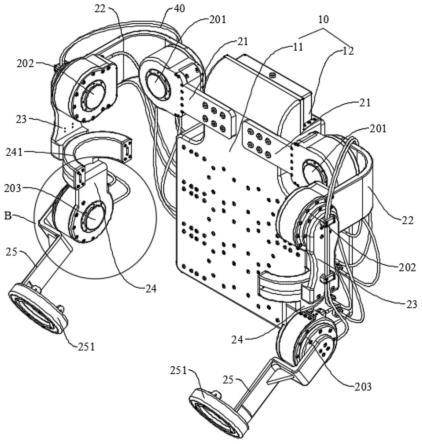
32.图1为本发明于一实施例中水下作业用上肢外骨骼机构的结构示意图。
33.图2为本发明于一实施例中水下作业用上肢外骨骼机构的后侧示意图。
34.图3为本发明于一实施例中水下作业用上肢外骨骼机构的前侧示意图。
35.图4为本发明于一实施例中水下作业用上肢外骨骼机构的右侧示意图。
36.图5为本发明于一实施例中关节运动示意图。
37.图6为图1中b处取出密封盖后的放大结构示意图。
38.图7为图3中沿a-a的剖面结构示意图。
39.图8为图7中d处的放大结构示意图。
40.图9为图4中沿c-c的剖面结构示意图。
41.图10为图9中e处的放大结构示意图。
42.图11为本发明于一实施例中套索预紧结构示意图。
43.标号说明:
44.密封箱体10;驱动组件30;套索组件40;第一套索41;第二套索42;密封背板12;第一肩关节节点201;第二肩关节节点202;肘关节节点203;第一肩关节杆件21;第二肩关节杆件22;第一上臂杆件23;第二上臂杆件24;滑块231;半圆形结构241;滑轨242;下臂杆件25;腕部自旋结构251;外圈部分2511;内圈部分2512;密封件2011;转轴2012;编码器2013;环形磁环 2014;密封盖2015;螺旋缠绕轮2016;端盖2017;轴承2018;第一密封圈 2019;套筒2020;第二密封圈2021;唇形密封圈2022;驱动电机31;第二螺旋缠绕轮32;沉孔301;密封座302;橡胶圈303;第三密封圈304;预紧组件 50;第一预紧件51;第二预紧件52;安装座501;螺钉502;滑轮503;滑轮安装件504。
具体实施方式
45.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
46.需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
47.请参阅图1至图11所示,本发明提出一种水下作业用上肢外骨骼机构,以改善现有结构存在的上肢外骨骼本体部分重量将严重影响助力效果、以及未考虑水下作业密封防水需求的问题,具体的,所述上肢外骨骼机构包括密封箱体10、两个上肢外骨骼组件、多个驱动组件30和多个套索组件40,所述驱动组件设置在所述密封箱体10内,所述套索组件设置在所述驱动组件和所述上肢外骨骼之间,两个上肢外骨骼组件分别为右臂外骨骼组件和左边外骨骼组件,且所述左臂外骨骼组件和所述右臂外骨骼组件对称安装在所述密封箱体的两侧上,所述左臂外骨骼组件和所述右臂外骨骼组件的结构相同,通过双臂之间的良好协作,助力完成水下作业工作者工作。需要说明的是,右臂外骨骼组件和左边外骨骼组件是根据穿戴人体的左右来确定。
48.请参阅图1至图4所示,在本实施例中,所述密封箱体10包括密封箱11 和密封背板12,所述密封箱11和所述密封背板12之间用过螺栓固定连接在一起以形成收容腔,所述驱动组件设置在所述收容腔内,且通过螺栓固定安装在所述密封背板12上。需要说明的是,该密封箱体10上的每个螺栓连接处均设置有密封垫,以起到密封防水的作用,从而保护该密封箱体10内的驱动组件和控制器等结构,以保证其能够顺利的实现水下作业,且通过将驱动组件安装在密封箱体内,以使得手臂本体部分整体重量轻,有利于水下作业。
49.请参阅图1至图4所示,在本实施例中,以右臂外骨骼组件为例进行说明,以详细描述所述上肢外骨骼组件的结构。所述上肢外骨骼组件包括多个关节杆件和多个关节节点,且相邻的两个所述关节杆件之间通过所述关节节点转动连接在一起,且每个所述关节节点均对应一个驱动组件,且每个所述关节节点和与其对应的驱动组件之间均设置有一个所述套索组件,所述套索组件包括第一套索41和第二套索42,所述第一套索41和所述第二套索42的一端连接在对应的所述关节节点上,另一端穿过所述密封箱体以连接在对应的所述驱动组件30上,且所述第一套索41和所述第二套索42与所述密封箱体和所述关节节点的连接处均设置有密封结构,在所述驱动组件30的正转或反转的驱动作用下,通过所述第一套索41或所述第二套索42带动所述关节节点的正转或反转。
50.请参阅图1至图4所示,在本实施例中,所述关节节点包括第一肩关节节点201、第二肩关节节点202和肘关节节点203,设置在所述密封腔体的收容腔内的多个驱动组件与所述第一肩关节节点201、所述第二肩关节节点201和所述肘关节节点203一一对应。
51.请参阅图1中至图4所示,在本实施例中,所述关节杆件上设置有多个套索固定件204,用于固定套索组件40,套索组件40沿关节杆件布置,并且穿过所述套索固定件204,使其套索的走向及布置清晰,避免了过多的套索之间相互缠绕而导致其无法正常工作。
52.请参阅图1中至图4所示,在本实施例中,所述关节杆件包括第一肩关节杆件21和第二肩关节杆件22,所述第一肩关节杆件21的一端通过螺栓固定安装在所述密封背板12上,且该螺栓连接处设置有密封垫圈,以实现密封防水,所述第二肩关节杆件22的一端通过所述第一肩关节节点201与所述第一肩关节杆件21转动连接在一起,另一端朝向远离所述密封背板12的一侧弯曲以形成弧形结构。另外,所述密封箱体10内安装有驱动组件,所述驱动组件与所述第一肩关节节点201之间连接有第一套索41和第二套索42,通过所述驱动组件的驱动,并在所述第一套索41和所述第二套索42的带动下带动所述第一肩关节节点201正转或反转。
53.请参阅图1中至图4所示,在本实施例中,所述关节杆件还包括第一上臂杆件23和第二上臂杆件24,所述第一上臂杆件23的一端通过所述第二肩关节节点202与所述第二肩关节杆件22的一端转动连接在一起,所述第二肩关节节点202和与其对应的驱动组件之间同样设置有第一套索41和第二套索42,通过所述驱动组件的驱动,并在所述第一套索41和所述第二套索42的带动下带动所述第二肩关节节点202正转或反转。
54.请参阅图1中至图4所示,在本实施例中,所述第一上臂杆件23的另一端上设置有滑块231,而所述第二上臂杆件24与所述第一上臂杆件23连接的一端上设置有半圆形结构241,所述半圆形结构241用于半包裹在操作人员的上臂上,且所述半圆形结构241的外圆周上设置有滑轨242,所述滑轨242与所述滑块231滑动连接,以使得所述第二上臂杆24在所述滑块231和所述滑轨242的配合作用下沿其滑轨242滑动,从而为操作人员的上臂转动提供支撑。
55.请参阅图1中至图4所示,在本实施例中,所述关节杆件还包括下臂杆件 25,所述下臂杆件25的一端通过所述肘关节节点203与所述第二上臂杆件24 的另一端转动连接,所述肘关节节点203和与其对应的驱动组件之间同样设置有第一套索41和第二套索42,通过所述驱动组件的驱动,并在所述第一套索 41和所述第二套索42的带动下带动所述肘关节节点203正转或反转。还需要说明的是,所述下臂杆件25的另一端上还设置有腕部自旋结构251,所述腕部自旋结构251包括外圈部分2511和内圈部分2512,所述外圈部分与所述下臂杆件25固定连接在一起,所述内圈部分2512转动安装在所述内圈部分2511 内,穿戴时,操作人员的腕部位于所述内圈部分2512内,以为操作人员的腕部活动提高支撑。
56.请参阅图1及图5所示,在本实施例中,上述各个关节杆件之间的相对转动组合构成操作人员手臂的肩关节外展/内收运动、肩关节屈曲/伸展运动、肘关节屈曲/伸展运动、肩关节外旋/内旋运动和前臂外旋/内旋运动。
57.请参阅图1及图5所示,其中,所述第一肩关节杆21与所述第二肩关节杆件22的组合构成肩关节外展/内收运动,即所述第二肩关节杆件22相对于所述第一肩关节杆21的旋转,构成肩关节外展/内收运动,其旋转是通过驱动组件进行驱动。
58.请参阅图1及图5所示,所述第二肩关节杆22与所述第一上臂杆件23的组合构成肩关节屈曲/伸展运动,即所述第一上臂杆件23相对于所述第二肩关节杆22的旋转,构成肩关节屈曲/伸展运动,其旋转是通过驱动组件进行驱动。
59.请参阅图1及图5所示,所述第一上臂杆件23与所述第二上臂杆24的组合构成肩关节外旋/内旋运动,即所述第二上臂杆24相对于所述第一上臂杆件 23的旋转,构成肩关节外旋/内旋运动,其旋转是在操作人员动作下被动旋转。
60.请参阅图1及图5所示,所述第二上臂杆24与所述下臂杆件25的组合构成肘关节屈曲/伸展运动,即所述下臂杆件25相对于所述第二上臂杆24的旋转,构成肘关节屈曲/伸展运动,其旋转是通过驱动组件进行驱动。
61.请参阅图1及图5所示,外圈部分2511与内圈部分2512组合构成前臂外旋/内旋运动,即内圈部分2512相对于外圈部分2511的旋转,构成前臂外旋/ 内旋运动,其旋转是在操作人员动作下被动旋转。
62.请参阅图1及图5所示,需要说明的是,上述各个关节杆件之间的相对转动构成右臂5个自由度,其中,肩关节外展/内收运动、肩关节屈曲/伸展运动、肘关节屈曲/伸展运动是主动运动,即具有电机驱动。肩关节外旋/内旋运动、前臂外旋/内旋运动是被动运动,即无电机驱动。
63.请参阅图1、图5至图8所示,在本实施例中,相邻的两个所述关节杆件之间的关节节点的结构相同,以相邻的第一肩关节杆件21和所述第二肩关节杆件22以及其之间的第一肩关节节点201为例进行说明,所述第一肩关节节点201包括密封件2011、转轴2012、编码器2013、环形磁环2014、密封盖 2015、螺旋缠绕轮2016和端盖2017,所述密封件2011内形成有容纳腔,且所述密封件2011固定安装在所述第一肩关节杆件21的一端上,所述转轴2012 转动连接在所述密封件2011内,所述转轴2012的两端上分别套设有轴承 2018,以使得所述转轴2012在所述密封件2011内顺利转动。在一些其他实施例中,所述密封件2011与所述第一肩关节杆件21为一体成型结构,以进一步保证其结构强度和密封性。
64.请参阅图1、图5至图8所示,在本实施例中,所述转轴2012的一端与所述第二肩关节杆22通过螺栓固定连接在一起,且所述转轴2012的另一端上套设安装有所述编码器2013和所述环形磁环2014,所述环形磁环2014位于所述转轴2012和所述编码器2013之间,通过在每个关节节点处设置编码器2013 和环形磁环2014,用于测量主动关节角度,方便反馈关节运动角度,进而采用控制算法,控制关节运动按照预期轨迹运行。
65.请参阅图1、图5至图8所示,在本实施例中,所述密封盖2015通过螺栓固定安装在所述密封件2011上,且罩设在所述编码器2013和所述环形磁环 2014上方,以起到保护所述编码器2013和所述环形磁环2014的作用,且所述密封盖2015与所述密封件2011之间设置有第一密封圈2019,通过所述密封盖 2015将所述第一密封圈2019压紧,从而实现密封防水的性能,以保证该机构的水下作业时的安全性、可靠性以及延长其使用寿命。
66.请参阅图1、图5至图8所示,在本实施例中,所述螺旋缠绕轮2016安装在所述转轴2012上,且与所述螺旋缠绕轮2016之间通过键传动或固定安装在一起,且在所述螺旋缠绕轮2016的两侧设置有套筒2020,以使得对所述螺旋缠绕轮2016的定位,所述第一套索41和所述第二套索42的一端穿过所述密封件2011以和所述螺旋缠绕轮2016连接,通过所述第一套索41和所述第二套索42带动所述螺旋缠绕轮2016正转或反转,以实现上述肩关节外展/内收运动,其套索两端分别与关节节点内的螺旋缠绕轮2016和驱动组件中的螺旋缠绕轮连接,通过螺旋缠绕,增加摩擦力,防止打滑。
67.请参阅图1、图5至图8所示,在本实施例中,所述端盖2017通过螺栓固定安装所述密封件2011远离设置有所述密封盖2015的一侧上,且所述端盖 2017与所述密封件2011之间设置有第二密封圈2021,且所述端盖2017与所述转轴2012的连接处设置有唇形密封圈2022,所述唇形密封圈2022套设在所述转轴2012上,从而实现密封防水的性能,以保证该机
构的水下作业时的安全性、可靠性以及延长其使用寿命,上述各个密封圈和密封盖组成所述关节节点的密封结构。
68.请参阅图1及图9所示,在本实施例中,所述驱动组件30包括驱动电机 31和第二螺旋缠绕轮32,所述驱动电机31驱动所述第二螺旋缠绕轮32转动,所述第一套索41和/或所述第二套索42的两端分别穿过所述密封箱体10 和所述密封件2011以和所述驱动组件中的第二螺旋缠绕轮32和所述密封件2011内的螺旋缠绕轮2016连接,通过所述驱动电机31驱动所述第二螺旋缠绕轮32,从而使得所述第一套索41或所述第二套索42在所述第二螺旋缠绕轮 32缠绕,从而带动所述螺旋缠绕轮2016转动,通过将电机、驱动器、控制器等布置于防水的密封箱体10内,通过套索将能量传递到对应的六个主动运动关节,以实现助力。
69.需要说明的是,套索包含套和索两部分,套为索提供柔性的行进通道,索一般是钢丝绳,索缠绕在螺旋缠绕轮上,增加摩擦力,防止打滑。
70.请参阅图1、图9及图10所示,在本实施例中,每根所述第一套索41和/ 或所述第二套索42穿过所述密封箱体10和所述密封件2011的连接处均设置的密封结构,所述密封结构包括沉孔301、密封座302、橡胶圈303和第三密封圈304,所述沉孔301设置在所述密封箱体10和/或所述密封件2011上,所述密封座302固定在所述第一套索41和/或所述第二套索42上,且位于所述沉孔301内,所述橡胶圈303套设在所述第一套索41和/或所述第二套索42上,且位于所述沉孔301内,通过所述密封座302的端面将其压紧在所述沉孔301 内,第三密封圈304套设在所述密封座302上,且位于所述沉孔301的侧壁与所述密封座302之间,填充所述密封座302与所述沉孔301之间的间隙,以实现其套索连接处的密封结构。在本实施例中,所述密封结构还包括锁紧件 305,所述锁紧件305沿径向穿过所述密封箱体10和所述密封座302,以将所述套索固定在该位置上。
71.请参阅图1、图9及图10所示,以所述第一套索41穿入所密封箱体10处的密封结构为例进行说明,所述沉孔301设置在所述密封箱体10上,所述沉孔301设置在所述密封箱体10上,所述密封座302固定在所述第一套索41 上,且位于所述沉孔301内,所述橡胶圈303套设在所述第一套索41上,且位于所述沉孔301内,通过所述密封座302的端面将其压紧在所述沉孔301 内,第三密封圈304套设在所述密封座302上,且位于所述沉孔301的侧壁与所述密封座302之间,填充所述密封座302与所述沉孔301之间的间隙,以实现第一套索41和所述密封箱体10连接处的密封结构。
72.请参阅图2及图11所示,在本实施例中,所述密封箱体10内设置有多个预紧组件50,分别与多个所述驱动组件30一一对应,所述预紧组件50包括第一预紧件51和第二预紧件52,所述第一预紧件51和所述第二预紧件52的结构相同,以第一预紧件51为例进行说明,其包括安装座501、螺钉502和滑轮 503,所述安装座501固定安装在所述密封箱体10的内部,所述螺钉502安装在所述安装座501上,所述滑轮503通过滑轮安装件504与所述螺钉502之间通过螺纹连接在一起,所述第一套索41和所述第二套索42分别绕设在所述第一预紧件51和所述第二预紧件52中的滑轮503上,通过调整所述滑轮503在所述螺钉502上的位置以预紧所述第一套索41和所述第二套索42。
73.本发明提出一种水下作业用上肢外骨骼机构,通过将驱动组件安装在密封箱体内,由于手臂本体部分并不包含电机、驱动器等部件,以使得手臂本体部分整体重量轻,有利于水下作业,且电机、驱动器、控制器等布置于防水背板里面,通过套索将能量传递到对
应的六个主动运动关节,以实现助力。
74.本发明提出一种水下作业用上肢外骨骼机构,套索两端分别与关节节点内的螺旋缠绕轮和驱动组件中的螺旋缠绕轮连接,通过螺旋缠绕,增加摩擦力,防止打滑。
75.本发明提出一种水下作业用上肢外骨骼机构,通过在每个关节节点处设置编码器和环形磁环,用于测量主动关节角度,方便反馈关节运动角度,进而采用控制算法,控制关节运动按照预期轨迹运行。
76.本发明提出一种水下作业用上肢外骨骼机构,在各个关节节点处均设置有密封结构,同样的,在每个套索与密封箱体和关节节点的连接处均设置有密封结构,以及该外骨骼机构上每个螺栓连接处均设置有密封垫圈,以保证该结构的密封防水性能,从而保证其能够顺利在水下进行作业。
77.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明,本领域技术人员应当理解,本技术中所涉及的范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案,例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
78.除说明书所述的技术特征外,其余技术特征为本领域技术人员的已知技术,为突出本发明的创新特点,其余技术特征在此不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1