一种船艇防止侧翻的控制方法及系统
1.本发明涉及船艇控制技术,更具体地说,它涉及一种船艇防止侧翻的控制方法及系统。
背景技术:
2.电子控制单元,即ecu,是根据其内存中存储的程序和数据,对各种传感器输入的信息进行运算处理以及判断等操作,并且向其他器件对应地输出控制指令。因此,被广泛运用于发动机控制领域。
3.ecu对于汽车领域,其技术的应用已经十分成熟。例如,ecu对车速、转向、制动等控制,均能有效的确保汽车稳定的行驶。对于船艇,尤其是高速艇,其发动机也是采用汽油发动机,与汽车发动机大同小异,因此两者在发动机的控制技术上存在有较多的通用性,ecu依然作为船艇的主要控制部件。
4.但是,由于船艇与汽车的使用环境并不相同,因此,船艇对速度的响应与汽车也是不同的。例如,船艇上的ecu通过获取两个发动机的控制手柄的位置,控制两台发动机的差速来实现转弯。然而,在用户使用过程中,要求用户对两个控制手柄的控制位置进行精准的操作。若控制手柄的位移幅度过大导致两个发动机的差速过大,则容易出现船艇侧翻事故。因此,船艇的驾驶员一般都需要经过长时间的培训,以尽可能降低因人为操作导致船艇的侧翻事故。但这不能从根本问题上解决船艇的侧翻事故问题。若因航行环境的变化、驾驶员疏忽或操作失误,依然存在对两台发动机差速调节过度,从而产生船艇侧翻的事故。
技术实现要素:
5.本发明要解决的技术问题是针对现有技术的不足,提供一种船艇防止侧翻的控制方法及系统,有效地防止驾驶员在操作过程中过度调节手柄导致船艇的侧翻事故,大大的提高了航行的安全性。
6.本发明所述的一种船艇防止侧翻的控制方法,获取船艇的航行参数,根据所述航行参数标定两台发动机的安全差速阈值,并根据所述安全差速阈值获取两个控制手柄的安全位置差值;
7.监测两台发动机转速的实际差速,并通过所述实际差速获取两个控制手柄的实际位置差值;
8.实时监测两个所述控制手柄的位置变化量,并根据所述实际位置差值以及位置变化量获取两个控制手柄的实时位置差值;
9.比较所述实时位置差值与安全位置差值之间的大小关系;若所述安全位置差值大于或等于实时位置差值,则所述控制手柄保持在当前的位置;若所述安全位置差值小于实时位置差值,则对所述控制手柄进行位置弹动处理,以使位置弹动后的所述控制手柄之间的位置差值等于安全位置差值。
10.对所述控制手柄进行位置弹动处理,具体包括,
11.计算所述实时位置差值与安全位置差值之间的位置误差值;对进行了位移操作的控制手柄进行位置弹动,以使所述控制手柄的位置弹动幅度等于位置误差值。
12.若两个所述控制手柄均进行了位移操作,则判断船艇航行在当前海域的海域环境;
13.若所述海域环境为平静海域环境,则保持与转速高的发动机相对应的控制手柄位置不变,对与转速低的发动机相对应的控制手柄进行位置弹动,以使所述控制手柄的位置弹动幅度等于位置误差值;
14.若所述海域环境为恶劣海域环境,则保持与转速低的发动机相对应的控制手柄位置不变,对与转速高的发动机相对应的控制手柄进行位置弹动,以使所述控制手柄的位置弹动幅度等于位置误差值;
15.若所述海域环境为常态海域环境,则对两个所述控制手柄均进行位置弹动处理,且两个所述控制手柄的位置弹动幅度均为位置误差值的一半。
16.判断船艇航行在当前海域的海域环境,具体包括,
17.设定监测项目以及项目参数,并设定一参数误差范围;监测船艇航行在当前海域的环境参数;
18.若所述环境参数大于项目参数,计算所述环境参数与项目参数的参数差值,并计算所述参数差值与项目参数的参数比值;若所述参数比值位于参数误差范围以内,则判定所述海域环境为常态海域环境;否则,判定所述海域环境为恶劣海域环境;
19.若所述环境参数小于项目参数,计算所述环境参数与项目参数的参数差值绝对值,并计算所述参数差值绝对值与项目参数的参数比值;若所述参数比值位于参数误差范围以内,则判定所述海域环境为常态海域环境;否则,判定所述海域环境为平静海域环境。
20.所述监测项目包括海风风速、海水流速以及船艇摆幅。
21.所述实时位置差值为实际位置差值与位置变化量的和。
22.当所述实时位置差值与安全位置差值比较完毕,且对所述控制手柄的位置进行保持处理或位置弹动处理完毕后,所述发动机以与其相对应的控制手柄的位置进行转速输出。
23.所述航行参数包括船艇航速。
24.一种船艇防止侧翻的控制系统,包括航速测量模块、海域环境参数采集模块、ecu、两台发动机以及两个控制手柄;所述ecu用于采集航速测量模块输出的船艇航速信号、海域环境参数采集模块的项目参数信号、两台发动的转速信号以及两个控制手柄的位置信号,且所述ecu应用所述的控制方法对所述船艇航速信号、项目参数信号、转速信号、位置信号进行处理,以使两个控制手柄的实时位置差值在安全位置差值以内。
25.海域环境参数采集模块包括用于采集海风风速的风速仪、用于采集海水流速的水流传感器以及用于采集船艇摆幅的陀螺仪。
26.有益效果
27.本发明的优点在于:通过船艇转向时两个控制手柄安全位置差值的设定,可以有效地防止驾驶员在操作过程中过度调节手柄导致船艇的侧翻事故,大大的提高了航行的安全性。而且由于船艇的控制系统智能化得以提高,对减轻驾驶员的驾驶负担起到了有效的帮助。
附图说明
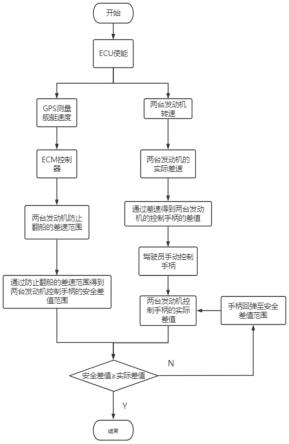
28.图1为本发明的控制方法流程示意图。
具体实施方式
29.下面结合实施例,对本发明作进一步的描述,但不构成对本发明的任何限制,任何人在本发明权利要求范围所做的有限次的修改,仍在本发明的权利要求范围内。
30.参阅图1,本发明的一种船艇防止侧翻的控制方法,包括以下步骤。
31.步骤一、获取船艇的航行参数,根据航行参数标定两台发动机的安全差速阈值。其中,航行参数包括船艇航速。即本实施例通过船艇航速对两台发动机的安全差速阈值进行标定。
32.例如,对于某一型号的船艇,技术人员可通过标定对照的方式获取在某一船艇航速时两台发动机的最大安全差速阈值。具体为,通过测试不同的船艇航速,从而获取到一船艇航速与安全差速阈值的数据库,并将其存储在ecu中。在实际航行中,通过实际测量到的船艇航速即可快速地实现安全差速阈值的标定。而且,该标定对照的方式属于本领域常用的一技术手段,易于实现。
33.在获取到安全差速阈值后,ecu即可根据安全差速阈值获取两个控制手柄的安全位置差值。由于控制手柄的每个位移位置均对应有发动机相应的输出转速,ecu在获取到安全差速阈值后,仅需通过本领域技术人员常用的标定对照方式即可获取到两个控制手柄的安全位置差值。故而不作更多的探讨。
34.步骤二、监测两台发动机转速的实际差速,并通过实际差速获取两个控制手柄的实际位置差值。关于实际位置差值的获取,本领域技术人员同样可采用标定对照方式得到。
35.步骤三、实时监测两个控制手柄的位置变化量,并根据实际位置差值以及位置变化量获取两个控制手柄的实时位置差值。其中,实时位置差值等于实际位置差值与位置变化量的和。
36.步骤四、比较实时位置差值与安全位置差值之间的大小关系。若安全位置差值大于或等于实时位置差值,则控制手柄保持在当前的位置。若安全位置差值小于实时位置差值,则对控制手柄进行位置弹动处理,以使位置弹动后的控制手柄之间的位置差值等于安全位置差值。
37.步骤五、当实时位置差值与安全位置差值比较完毕,且对控制手柄的位置进行保持处理或位置弹动处理完毕后,发动机以与其相对应的控制手柄的位置进行转速输出。
38.通过上述步骤的船艇发动机的控制,当驾驶员在手动操作控制手柄时,ecu首先监测两个控制手柄之间的实时位置差值是否超出船艇在当前航速下所对应的安全位置差值的范围。并且提前调整控制手柄,以确保两个控制手柄之间的位置差值始终保持在安全位置差值的范围内,再使发动机以调整后的控制手柄的位置进行输出。这样可以有效地防止驾驶员在操作过程中过度调节手柄导致船艇的侧翻事故,大大的提高了航行的安全性。而且由于船艇的控制系统智能化得以提高,对减轻驾驶员的培训工作、减轻驾驶员的驾驶负担也起到了帮助。
39.在本实施例中,对控制手柄进行位置弹动处理,具体包括,计算实时位置差值与安全位置差值之间的位置误差值。ecm艇用智能终端对进行了位移操作的控制手柄进行位置
弹动,以使控制手柄的位置弹动幅度等于位置误差值。
40.在大多数情况下,驾驶员的转向操作均操作一个控制手柄即可,此时,需要进行位置弹动处理的控制手柄为驾驶员操作过的控制手柄。但不排除驾驶员出现同时操作两个控制手柄的情况,如需船艇加速转向航行的情况。
41.若两个控制手柄均进行了位移操作,由于船艇,尤其是高速艇,其航速较快。为了更好的防止船艇侧翻,本实施例还从实际的海域环境对船艇的影响考虑。
42.当两个控制手柄均进行了位移操作时,首先判断船艇航行在当前海域的海域环境。关于海域环境的判断,其具体判断方法如下。
43.设定监测项目以及项目参数,并设定一参数误差范围。例如,监测项目包括海风风速、海水流速以及船艇摆幅。并且对每个监测项目均设置一参数误差范围。如,可将海风风速、海水流速以及船艇摆幅三个项目参数的误差范围均设置为
±
(30-50)%。
44.这样设置的原因主要是考虑到船艇在航行时所遇到的海域环境一般分为平静海域、常态海域以及恶劣海域。平静海域属于风速、海水流速、波浪均较小的情况,恶劣海域则与平静海域相反。为进一步区分,本实施例通过设定项目参数以划分平静海域、常态海域和恶劣海域。
45.例如,设定项目参数为,海风风速为5级、海水流速为5km/h、波浪浪高为1m时的船艇摆幅。参数误差范围设为40%。据此可知,常态海域的海风风速在3-7级之间、海水流速为3-5km/h之间、浪高在0.6-1.4m时的船艇摆幅。在海风风速在3级以下、海水流速为3km/h以下、浪高在0.6m以下时的船艇摆幅,判定为平静海域;而在海风风速在7级以上、海水流速为7km/h以上、浪高在1.4m以上时的船艇摆幅,判定为恶劣海域。
46.需要说明的是,本实施例不考虑三个项目参数均处于临界值的情况。主要是因为海域环境并非一非常稳定的环境,其海风风速、海水流速以及浪高均是不停地在变化的,因此,出现三个项目参数均处于临界值的概率是十分微小的,故而不对其作考虑。
47.监测船艇航行在当前海域的环境参数。并根据环境参数判断船艇当前的海域环境。
48.若环境参数大于项目参数,计算环境参数与项目参数的参数差值,并计算参数差值与项目参数的参数比值;若参数比值位于参数误差范围以内,则判定海域环境为常态海域环境;否则,判定海域环境为恶劣海域环境。
49.若环境参数小于项目参数,计算环境参数与项目参数的参数差值绝对值,并计算参数差值绝对值与项目参数的参数比值;若参数比值位于参数误差范围以内,则判定海域环境为常态海域环境;否则,判定海域环境为平静海域环境。
50.需要说明的是,上述关于环境参数与项目参数的比较,均为三个参数同时比较,且在三个环境参数均大于或小于相对应的项目参数时,再执行参数差值运算。而当三个环境参数中的任一个或两个参数与项目参数的比较结果与其余环境参数与项目参数的比较结果不相同时,则直接将当前海域环境判定为常态海域环境。而且,在实际的海域环境中,其风速、水流流速以及波浪高度均属于正比关系。即风速越大,水流流速以及波浪高度也越大;反之则越小。因此,针对上述三个环境参数与项目参数的比较,其比较结果出现有一个或两个不同于其与参数比较结果的现象属于小概率现象,对海域环境的判断影响不大。
51.船艇所处的海域环境判断完毕后,若海域环境为平静海域环境,则保持与转速高
的发动机相对应的控制手柄位置不变,对与转速低的发动机相对应的控制手柄进行位置弹动,以使控制手柄的位置弹动幅度等于位置误差值。
52.例如,左右两台发动机,当左发动机的转速高于右发动机时,在平静海域时,监测到两个控制手柄同时位移的情况。此时则保持左发动机的控制手柄位置不变,右发动机的控制手柄位置弹动即可。这样做的好处在于能提高船艇的转向速度,以达到驾驶员需最大化提升转向速度的要求。
53.若海域环境为恶劣海域环境,则保持与转速低的发动机相对应的控制手柄位置不变,对与转速高的发动机相对应的控制手柄进行位置弹动处理,以使控制手柄的位置弹动幅度等于位置误差值。当船艇航行在恶劣海域环境时,船艇的摇摆幅度较大,稳定性较差。因此,将驾驶员所需提高的船艇转向速度最小化,利于防止船艇侧翻事故的发生。
54.若海域环境为常态海域环境,则对两个控制手柄均进行位置弹动处理,且两个控制手柄的位置弹动幅度均为位置误差值的一半,以在提高了转向航速的前提下,降低了转向速度过快存在的船艇侧翻风险。
55.一种船艇防止侧翻的控制系统,包括航速测量模块、海域环境参数采集模块、ecu、两台发动机以及两个控制手柄。ecu用于采集航速测量模块输出的船艇航速信号、海域环境参数采集模块的项目参数信号、两台发动的转速信号以及两个控制手柄的位置信号,且ecu应用上述的控制方法对船艇航速信号、项目参数信号、转速信号、位置信号进行处理,以使两个控制手柄的实时位置差值在安全位置差值以内。这样可以有效地防止驾驶员在操作过程中过度调节手柄导致船艇的侧翻事故,大大的提高了航行的安全性。而且由于船艇的控制系统智能化得以提高,对减轻驾驶员的培训工作、减轻驾驶员的驾驶负担也起到了帮助。
56.当实时位置差值与安全位置差值比较完毕,且对控制手柄的位置进行保持处理或位置弹动处理完毕后,发动机以与其相对应的控制手柄的位置进行转速输出。
57.此外,控制系统的海域环境参数采集模块包括用于采集海风风速的风速仪、用于采集海水流速的水流传感器以及用于采集船艇摆幅的陀螺仪。船艇航速通过gps测量或通过北斗定位系统测量。
58.以上所述的仅是本发明的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1