一种海工船动态检测智能定距侧靠系统及方法与流程
1.本发明涉及一种海工船动态检测智能定距侧靠系统及方法,属于船舶锚定领域。
背景技术:
2.风电安装船等工程船在海上作业时,需要从无动力运输船或驳船进行大部件吊装或倒驳,因其自身缺少动力装置及dp定位系统,需要借助抛锚艇进行抛锚定位,受海上风浪流的影响定位锚无法准确定位或定位困难;运输船能否准确定位,对作业的准确度、作业成本等问题起着至关重要的作用。因此,需要能智能检测并调整侧靠距离的船舶定位系统。
3.专利cn109747784a《船海工程单点系泊锚桨联合协同定位系统及方法》公开了:一种船海工程单点系泊锚桨联合协同定位系统,包括上位机、锚绞机系统、船舶推进系统以及系泊平台环境参数检测系统;所述上位机通过通信网络分别与所述锚绞机系统、所述船舶推进系统以及所述系泊平台环境参数检测系统连接。优点为:通过系泊锚-桨联合协同定位,资源利用率高,减小了系泊设备容量;缺点为:不适用于没有加装动力装置和dp定位系统的船舶。
技术实现要素:
4.为了克服现有技术中存在的问题,本发明设计了一种海工船动态检测智能定距侧靠系统及方法,通过控制模块控制定位锚模块动作,使船舶无需动力装置即可自动完成船舶定距侧靠。
5.为了实现上述目的,本发明采用如下技术方案:
6.技术方案一:
7.一种海工船动态检测智能定距侧靠系统,其特征在于,包括:
8.数据采集模块,所述数据采集模块用于采集并输出船舶位置数据、船舶环境数据、锚机状态数据至控制模块;
9.定位锚模块,所述定位锚模块包括若干个电动机、锚机、锚链和锚;
10.控制模块,所述控制模块分别与数据采集模块、定位锚模块通信连接,用于根据船舶位置数据,控制定位锚模块进行抛锚动作;以及根据船舶位置数据或预设的锚链张力目标值,调整锚链收放量。
11.进一步地,所述数据采集模块包括激光测距装置、电罗经、差分全球定位系统、风速测量仪以及设置在锚机上的张力传感器、角度传感器。
12.进一步地,所述定位锚模块还包括电磁换向阀和绝对值编码器。
13.进一步地,所述控制模块根据船舶位置数据,计算船舶位置与目标位置的间距;若所述间距不超过预设的距离阈值,则控制模块向定位锚模块发出抛锚指令。
14.进一步地,还包括:根据船舶环境数据确定所述张力目标值,具体步骤如下:
15.构建目标函数:式中,τi表示第i个锚链的张力目标值;τ
avg
表示所有锚链的张力平均值;
16.求解所述目标函数,得到各锚链的张力目标值。
17.进一步地,所述根据船舶位置数据,调整锚链收放量,具体步骤如下:
18.获取船舶位置与目标位置的偏差角度和间距;
19.根据偏差角度和间距,计算锚链收放量,以公式表达为:
[0020][0021][0022]
式中,c(x)表示船舶位置与目标位置的间距;θi表示船舶靠近目标位置一侧角度传感器的测量数据;f(x1)表示船舶靠近目标位置一侧锚链的收放量;θj表示船舶远离目标位置一侧角度传感器的测量数据;f(x2)表示船舶远离目标位置一侧锚链的收放量。
[0023]
技术方案二:
[0024]
数据采集模块获取并发送船舶位置数据、船舶环境数据、锚机状态数据至控制模块;
[0025]
控制模块根据船舶位置数据,计算船舶位置与目标位置的间距;若所述间距不超过预设的距离阈值,则控制模块向定位锚模块发出抛锚指令;
[0026]
控制模块判断船舶环境数据是否超出预设范围,若超出预设范围,则控制模块根据船舶环境数据确定张力目标值,并根据张力目标值调整锚链收放量:读取各锚链实时张力值,若大于张力目标值,则控制该锚链松弛;若小于张力目标值,则控制该锚链收紧;
[0027]
若不超出预设范围,则控制模块根据船舶位置数据,调整锚链收放量。进一步地,所述根据船舶环境数据确定张力目标值,具体步骤如下:
[0028]
构建目标函数:式中,τi表示第i个锚链的张力目标值;τ
avg
表示所有锚链的张力平均值;
[0029]
求解所述目标函数,得到各锚链的张力目标值。
[0030]
进一步地,所述根据船舶位置数据,调整锚链收放量,具体步骤如下:
[0031]
获取船舶位置与目标位置的偏差角度和间距;
[0032]
根据偏差角度和间距,计算锚链收放量,以公式表达为:
[0033][0034][0035]
式中,c(x)表示船舶位置与目标位置的间距;θi表示船舶靠近目标位置一侧角度传感器的测量数据;f(x1)表示船舶靠近目标位置一侧锚链的收放量;θj表示船舶远离目标
位置一侧角度传感器的测量数据;f(x2)表示船舶远离目标位置一侧锚链的收放量
[0036]
与现有技术相比本发明有以下特点和有益效果:
[0037]
1、本发明通过控制模块控制定位锚模块动作,使船舶无需动力装置即可自动完成船舶定距侧靠。
[0038]
2、本发明根据船舶所受外力确定锚链张力目标值,并根据锚链张力目标值调整锚链,避免锚链断裂,保证船舶停泊安全。
[0039]
3、本发明根据船舶位置与目标位置的偏差角度和间距调整锚链,进一步提高侧靠准确度。
附图说明
[0040]
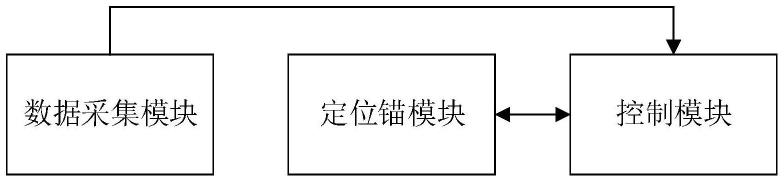
图1是本发明结构示意图。
具体实施方式
[0041]
下面结合实施例对本发明进行更详细的描述。
[0042]
实施例一
[0043]
如图1所示,一种海工船动态检测智能定距侧靠系统,包括:
[0044]
数据采集模块,所述数据采集模块用于采集并输出船舶位置数据、船舶环境数据、锚机状态数据至控制模块。具体包括:激光测距装置、电罗经、差分全球定位系统、风速测量仪、流速传感器以及设置在锚机上的张力传感器、角度传感器。
[0045]
定位锚模块,定位锚模块包括:电动机、锚机、锚链、锚。本实施例中具体为四台锚机,每台锚机配备1个绝对值编码器(分辨率4096个点/圈),绝对值编码器用于测算绳长、绳速,绝对值编码器安装和主卷筒同轴。此外,各锚配备高精度肖轴应变式张力传感器,用于实时测量锚链张力,该传感器配套有外置式信号放大器,用于调零和整定。电动机上安装有用于调整电动机转向的电磁换向阀。
[0046]
控制模块,所述控制模块分别与数据采集模块、定位锚模块通信连接,用于根据船舶位置数据,控制定位锚模块进行抛锚动作;以及根据船舶位置数据或预设的张力目标值,调整锚链收放量。
[0047]
实施例二
[0048]
进一步地,根据船舶环境数据确定所述张力目标值,具体步骤如下:
[0049]
构建目标函数:
[0050][0051]
式中,τi表示第i个锚链的张力目标值;τ
avg
表示所有锚链的张力平均值;n表示锚链总数,本实施例中n=4。
[0052]
构建目标函数的约束条件:
[0053]
τ
min
≤τi≤τ
max
[0054]
式中,f
x
、fy分别表示船舶受到的横向外力、纵向外力,根据风速测量仪测量的相对风速和相对风向角信息计算得到;αi表示第i个锚链与船舶艏向的夹角,由电罗经测量的艏
向信息得到;τ
min
分别表示锚链张力的下限值和上限值;μ表示安全系数,μ》1。
[0055]
引入松弛变量s,使约束条件变为:
[0056][0057]
求解所述目标函数的近似最优解τi……
τn,即各锚链的张力目标值。
[0058]
实施例三
[0059]
进一步地,根据船舶位置数据,调整锚链收放量,具体步骤如下:
[0060]
获取船舶位置与目标位置的偏差角度和间距(通过激光测距装置获取);
[0061]
根据偏差角度和间距,计算锚链收放量,以公式表达为:
[0062][0063][0064]
式中,c(x)表示船舶位置与目标位置的间距;θi表示船舶靠近目标位置一侧角度传感器的测量数据;f(x1)表示船舶靠近目标位置一侧锚链的收放量;θj表示船舶远离目标位置一侧角度传感器的测量数据;f(x2)表示船舶远离目标位置一侧锚链的收放量。
[0065]
实施例四
[0066]
控制模块根据船舶位置数据(通过差分全球定位系统获取),计算船舶位置与目标位置的间距;若所述间距不超过预设的距离阈值,则表示船舶进入靠泊区域,控制模块向定位锚模块发出抛锚指令,锚机将四个锚向外抛出。
[0067]
控制模块向电动机发出控制指令,电动机通过电磁换向阀进行正反转动,从而实现锚链收放。
[0068]
控制模块判断船舶环境数据中的实时风速和实时流速(通过风速测量仪、流速传感器获取)是否超出预设范围,若超出预设范围,则控制模块根据船舶环境数据重新确定张力目标值,并根据张力目标值调整锚链收放量:读取各锚链实时张力值,若大于张力目标值,则控制模块控制该锚链松弛;若小于张力目标值,则控制模块控制该锚链收紧。
[0069]
若实时风速和实时流速不超出预设范围,则控制模块根据船舶位置与目标位置的偏差角度和间距,进一步调整锚链收放量,保证船舶准确停泊。
[0070]
显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1