一种海面垃圾清理无人船
1.本发明涉及无人船领域,具体是一种海面垃圾清理无人船。
背景技术:
2.智慧清洁无人船,可用于城内湖泊智能清洁,基于近年来海面垃圾污染问题的智能化清洁方案;无人船是一种可以无需遥控,借助精确卫星定位和自身传感即可按照预设任务在水面航行的全自动水面机器人。
3.但是,目前用于海面垃圾清理的无人船,在清理过程中,固体垃圾容易粘附在导向板上,需要采用额外的动力单元,对导向板的垃圾进行辅助动力导向,不够方便,无法利用船体本身具有的传动机构实现上述功能;同时船体在收集垃圾的过程中,海水非常容易进入收集仓内,进入收集仓内的海水一般都是直接排出,无法以该海水作为动力,同时在无人船清理过程中,渔网状的垃圾会对其他垃圾形成阻挡,造成清洁效果不佳。
技术实现要素:
4.本发明的目的在于:为了解决上述背景技术中的问题,提供一种海面垃圾清理无人船。
5.为实现上述目的,本发明提供如下技术方案:一种海面垃圾清理无人船,包括船体与推进桨,所述船体的两侧通过安装架连接有浮板,所述船体的上方设置有贯穿至船体下方的进料仓,所述推进桨的内部设置有与船体相连的动力机构,所述进料仓的内壁安装有导向板,所述导向板的上方设置有与动力机构相连的刮板机构,所述船体的顶端安装有贯穿至进料仓内部的水力机构,所述浮板的内壁端部位于水力机构的一侧设置有调节机构;所述动力机构包括有安装于所述船体顶端末尾的输出电机,所述输出电机的输出端连接有贯穿至推进桨内部的连接轴,所述船体的底端设置有推进桨相连的外壳,所述连接轴的外壁位于外壳的上方固定有主动齿轮,所述主动齿轮的一侧啮合有位于船体内部的被动齿轮,所述被动齿轮的偏心位置转动连接有连杆,所述连杆的一端转动连接有贯穿至进料仓内部的推动板,所述推动板位于进料仓的一端转动连接有摆动杆,所述摆动杆的一端与所述刮板机构相连,所述连接轴的底端固定连接有主动锥齿轮,所述主动锥齿轮的外壁内核有与推进桨相连的被动锥齿轮;所述水力机构包括有设置于所述船体顶端,且位于进料仓与输出电机之间的抽水泵,所述抽水泵的输入端连接有贯穿至进料仓内部的进水管,所述抽水泵的输出端连接有贯穿至浮板内部的出水管,所述浮板的内部转动连接有水车,所述水车的一端通过转轴连接有位于所述进料仓内部主动破碎齿,所述主动破碎齿的外壁啮合有与进料仓相连的被动破碎齿,所述浮板的内部位于水车的转动方向位置安装有增压泵,所述增压泵的输出端设置有水仓。
6.作为本发明再进一步的方案:所述刮板机构包括有形成于所述进料仓内壁的导向槽,所述导向槽的内腔滑动连接有滚轮,所述滚轮的一端连接有移动板,所述移动板的内部
连接有贯穿至其下方的擦拭板,所述导向槽的中间突出部位置转动连接有转动板。
7.作为本发明再进一步的方案:所述调节机构包括有位于水仓端部,且与所述浮板密封固定连接的密封板,所述密封板的一面贴合设置有转动盘,所述转动盘与浮板转动连接,所述密封板的内部设置有出水口,所述转动盘的内部设置有与一个出水口对齐的通槽,所述转动盘的一端固定连接有转动环,且通槽的一端位于转动环的外侧安装有微型电机,所述微型电机的输出端连接有动力齿轮,所述动力齿轮的外壁啮合有固定与所述转动环外壁的齿块,所述转动环的一端设置有贯穿至浮板外部的喷水头。
8.作为本发明再进一步的方案:所述导向板的顶端呈左高右低的倾斜状态,所述擦拭板的底端与导向板的倾斜面相吻合,导向槽由弧形槽、直槽组成,所述直槽设置于弧形槽的两个端点连接位置处,所述转动板的一端与直槽相接触。
9.作为本发明再进一步的方案:所述出水管的输出端呈折弯垂直向下状态并与所述浮板的内腔相连通,所述水车由转轴、叶片组成,所述转轴与浮板的内腔转动连接,所述叶片设置有多个,且多个叶片等距固定安装于所述转轴的外壁。
10.作为本发明再进一步的方案:所述进水管的输入端位于主动破碎齿的下方,且所述进水管的输入端设置有与进料仓内腔固定连接的过滤网。
11.作为本发明再进一步的方案:所述船体的内部设置有供被动齿轮、连杆转动的转动轨迹槽,所述被动齿轮与船体通过转轴、轴承转动连接,所述船体的内部设置有供推动板移动的移动轨迹槽。
12.作为本发明再进一步的方案:所述出水口设置有两个,且两个出水口以密封板的横向中轴线呈上下分布,所述喷水头与浮板的端板连接处设置有密封件。
13.与现有技术相比,本发明的有益效果是:1、通过设置动力机构并配合刮板机构,可对附着在导向板上的塑料袋或者塑料薄膜或者渔网状垃圾进行有效清理、导向,防止垃圾无法有效进入收集仓内部;2、通过设置水力机构与调节机构,对排出的海水动力进行利用,即可对收集的垃圾进行初步破碎,还可以在需要时调节船体的方向与速度。
附图说明
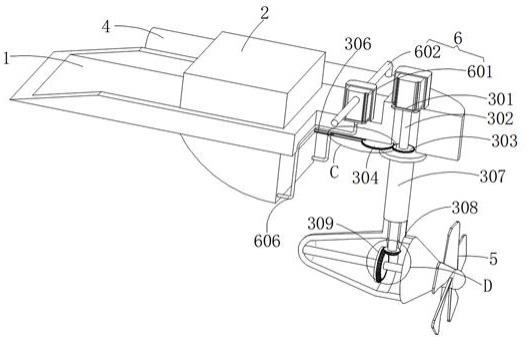
14.图1为本发明的结构示意图;图2为本发明传动机构的结构示意图;图3为本发明进料仓的内部结构示意图;图4为本发明图3中的a处局部放大图;图5为本发明图3中的b处局部放大图;图6为本发明水车的安装示意图;图7为本发明调节机构的结构示意图;图8为本发明转动盘的结构示意图;图9为本发明图2中的c处局部放大图;图10为本发明图2中的d处局部放大图;图11为本发明转动板的安装示意图。
15.图中:1、船体;2、进料仓;3、动力机构;301、输出电机;302、连接轴;303、主动齿轮;
304、被动齿轮;305、连杆;306、推动板;307、外壳;308、主动锥齿轮;309、被动锥齿轮;310、摆动杆;4、浮板;5、推进桨;6、水力机构;601、抽水泵;602、出水管;603、水车;604、主动破碎齿;605、被动破碎齿;606、进水管;607、增压泵;608、水仓;7、刮板机构;701、移动板;702、擦拭板;703、导向槽;704、滚轮;705、转动板;8、导向板;9、调节机构;901、密封板;902、出水口;903、微型电机;904、动力齿轮;905、转动环;906、齿块;907、喷水头;908、通槽;909、转动盘。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1~图11,本发明实施例中,一种海面垃圾清理无人船,包括船体1与推进桨5,船体1的两侧通过安装架连接有浮板4,船体1的上方设置有贯穿至船体1下方的进料仓2,推进桨5的内部设置有与船体1相连的动力机构3,进料仓2的内壁安装有导向板8,导向板8的上方设置有与动力机构3相连的刮板机构7,船体1的顶端安装有贯穿至进料仓2内部的水力机构6,浮板4的内壁端部位于水力机构6的一侧设置有调节机构9。
18.在本实施例中:首先,该装置的船体上配有给装置供能的蓄电池,在对海面垃圾进行收集处理时,利用载船将装置运输至预定海面,并将其放入海面,之后通过启动动力机构3,动力机构3带动推进桨5进行转动,使得装置进行移动,装置移动时,海水携带垃圾从船体的表面进入进料仓2内,并落入导向板8上,动力机构3在运行时带动刮板机构7对附着在导向板8上的垃圾进行辅助导向,随着垃圾进入装置的还有海水,此时水力机构6将进入进料仓2的海水抽出,并输送至浮板4的空腔内部,该部分海水在水力机构6的动力部分作用下,具有较大动能,该动能在与水力机构6的转动部件接触后,可有效带动水力机构6的转动部件进行转动,使得水力机构6的转动部件对塑料袋、渔网状的垃圾进行导向,之后该部分海水通过调节机构9喷出。
19.请着重参阅图2、图3、图9与图10,动力机构3包括有安装于船体1顶端末尾的输出电机301,输出电机301的输出端连接有贯穿至推进桨5内部的连接轴302,船体1的底端设置有推进桨5相连的外壳307,连接轴302的外壁位于外壳307的上方固定有主动齿轮303,主动齿轮303的一侧啮合有位于船体1内部的被动齿轮304,被动齿轮304的偏心位置转动连接有连杆305,连杆305的一端转动连接有贯穿至进料仓2内部的推动板306,推动板306位于进料仓2的一端转动连接有摆动杆310,摆动杆310的一端与刮板机构7相连,连接轴302的底端固定连接有主动锥齿轮308,主动锥齿轮308的外壁内核有与推进桨5相连的被动锥齿轮309;船体1的内部设置有供被动齿轮304、连杆305转动的转动轨迹槽,被动齿轮304与船体1通过转轴、轴承转动连接,船体1的内部设置有供推动板306移动的移动轨迹槽。
20.在本实施例中:在动力机构3进行运行时,首先驱动电机301运行,驱动电机301通过转轴、联轴器带动连接轴302进行转动,连接轴302通过主动锥齿轮308带动被动锥齿轮309进行转动,被动锥齿轮309即可带动推进桨5进行旋转,在连接轴302进行转动时,同步带动主动齿轮303进行转动,此时被动齿轮304在啮合作用下进行转动,被动齿轮304带动其偏
心位置的连杆305一端做圆周运动,此时连杆305的另一端做直线往复运动,连杆305的另一端转动连接的推动板306即可做往复运行,推动板306即可带动摆动杆310进行往复移动,此时刮板机构7即可在动力机构3的作用下做往复移动,刮板机构7的往复移动分为两部分动作:刮动作与复位动作,在进行刮动作时,呈直线移动,在进行复位动作时,进行弧形移动,刮板机构7与导向板8的顶端分离,使得刮板机构7不会将导向板8顶端的杂质推出,从而对附着在导向板8表面的杂质进行导向操作。
21.请着重参阅图2、图3、图6、图7与图9,水力机构6包括有设置于船体1顶端,且位于进料仓2与输出电机301之间的抽水泵601,抽水泵601的输入端连接有贯穿至进料仓2内部的进水管606,抽水泵601的输出端连接有贯穿至浮板4内部的出水管602,浮板4的内部转动连接有水车603,水车603的一端通过转轴连接有位于进料仓2内部主动破碎齿604,主动破碎齿604的外壁啮合有与进料仓2相连的被动破碎齿605,浮板4的内部位于水车603的转动方向位置安装有增压泵607,增压泵607的输出端设置有水仓608;出水管602的输出端呈折弯垂直向下状态并与浮板4的内腔相连通,水车603由转轴、叶片组成,转轴与浮板4的内腔转动连接,叶片设置有多个,且多个叶片等距固定安装于转轴的外壁;进水管606的输入端位于主动破碎齿604的下方,且进水管606的输入端设置有与进料仓2内腔固定连接的过滤网。
22.在本实施例中:抽水泵601作为水力机构的动力部件,对进入进料仓2内部的海水进行抽吸,通过过滤网进入进水管606的内部,过滤网对杂质进行过滤,防止杂质随之进入,海水通过进水管606后进入出水管602内,并顺着出水管602移动至浮板4的内腔,当从出水管602的输出端流出后,此时水车603与主动破碎齿604、被动破碎齿605作为水力机构6的转动部件,此时被抽水泵601赋予了强劲动能的水力直接作用在叶片上,叶片带动转轴进行转动,转轴再带动主动破碎齿604进行转动,主动破碎齿604转动再带动被动破碎齿605进行相向转动,此时一些容易堵住进料仓2的垃圾,如:塑料袋、渔网等较薄的垃圾与主动破碎齿604、被动破碎齿605接触,即可在二者相向旋转的导向作用力下进入进料仓2的内部,而较大的垃圾,如:玻璃瓶、湿木头等较粗、较厚的垃圾,在水流与导向机构7的作用下,从主动破碎齿604与进料仓2之间的空间进入进料仓2的内部,与叶片接触的水流在叶片的导向作用下流向浮板4的末端,并在增压泵607的作用下进入水仓608内,之后配合调节机构9即可将水仓608内的水体进行有效排出。
23.请着重参阅图3、图4与图5,刮板机构7包括有形成于进料仓2内壁的导向槽703,导向槽703的内腔滑动连接有滚轮704,滚轮704的一端连接有移动板701,移动板701的内部连接有贯穿至其下方的擦拭板702,导向槽703的中间突出部位置转动连接有转动板705,转动板705的底端面与导向槽703的直槽部分接触,使得转向板705只可以向上转动,并以转动轨迹进行复位,转动板705处于复位状态时,转动板705的非转动圆心一端与直槽一端的间距大于滚轮704的直径,使得滚轮704不会对转动板705的复位移动轨迹造成阻挡;导向板8的顶端呈左高右低的倾斜状态,擦拭板702的底端与导向板8的倾斜面相吻合,导向槽703由弧形槽、直槽组成,直槽设置于弧形槽的两个端点连接位置处,转动板705的一端与直槽相接触。
24.在本实施例中:在摆动杆310进行往复移动过程中,摆动杆310拉动与其转动连接的移动板701进行移动,移动板701即可拉动滚轮704在导向槽703的直槽内移动,直至滚轮
704与转动板705接触,此时滚轮704给转动板705施加挤压力,转动板705受力向上转动,直至转动板705的底端完全与滚轮704分离,之后转动板705失去来自滚轮704的挤压力,此时滚轮704移动至直槽的端部,在自重力作用下转动至初始位置,之后摆动杆310反向移动时,滚轮704随之反向移动,此时由于转动板705无法向下转动,滚轮704在反向移动时,会与转动板705的弧面接触,当滚轮704与转动板705外壁的弧面接触时,顺着转动板705移动至导向槽703上的弧形槽内,此时由于高度变化,摆动杆310与推动板306、移动板701产生相对转动,此时移动板701带动擦拭板702与导向板8分离,防止将后面进入进料仓2的杂质推出。
25.请着重参阅图7与图8,调节机构9包括有位于水仓608端部,且与浮板4密封固定连接的密封板901,密封板901的一面贴合设置有转动盘909,转动盘909与浮板4转动连接,密封板901的内部设置有出水口902,转动盘909的内部设置有与一个出水口902对齐的通槽908,转动盘909的一端固定连接有转动环905,转动盘909的一端位于转动环905的外侧安装有微型电机903,微型电机903的输出端连接有动力齿轮904,动力齿轮904的外壁啮合有固定与转动环905外壁的齿块906,转动环905的一端设置有贯穿至浮板4外部的喷水头907;出水口902设置有两个,且两个出水口902以密封板901的横向中轴线呈上下分布,喷水头907与浮板4的端板连接处设置有密封件。
26.在本实施例中:当通槽908与上方的出水口902对齐时,此时喷水头907处于向上倾斜状态,此时位于水仓608内的水体通过上方的出水口902进入通槽908,再通过转动环905的内腔从喷水头907喷出,此时水体在喷水头907的作用下向上喷出,不与海面接触,实现海水的排出,之后在需要进一步提高装置移动速度时,或者转向时,通过调节一个或两个喷水头907进行转动,具体过程为:通过控制微型电机903运行,微型电机903通过转轴、联轴器带动齿轮904进行转动,齿轮904在进行转动时通过齿块906带动转动环905进行转动,转动环905转动时同步带动喷水口907与转动盘909进行转动,直至转动180度,在该过程中转动盘909进行转动时,通槽908与出水口902发生错位,此时水仓608内的海水无法通过,直至转动完成后,通槽908与下方的出水口902对齐,此时海水继续从喷水口907喷出,当两个喷水口是同步进行转动时,则可以起到对装置进行加速的目的,若是一个喷水口转动180度时,则可以起到调向作用。
27.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1