数控可变波形的多关节柔性水下仿生推进器及其控制方法与流程
1.本发明涉及智慧海洋和水下仿生领域,具体是一种数控可变波形的多关节柔性水下仿生推进器及其控制方法。
背景技术:
2.随着海洋资源开发、海洋环境监测、以及海洋救护和保护等的需要越来越迫切,世界各国都在不断地开发新型的海洋装备来加强对海洋环境的监测和保护的能力。这类的海洋装备必须具有快速、机动、能潜入水下、甚至冰下执行任务的能力。
3.相比其它水下无人柔性航行器,以类似鱼类尾鳍或腹鳍为动力,尤其是以尾鳍和尾部摆动为动力的水下无人柔性航行器,以其效率高、机动性好、噪音低、对环境扰动小和易于隐蔽等优点,在海洋侦察和救护等方面有广泛的应用前途。gray在1936年提出了著名的格雷疑题(gray’sparadox),他发现游速为 15~20节的活体海豚仅需要1/7的直体海豚模型所需要的能量。
4.为了凸显本发明的特点和创造性,这里对有关背景知识做简要介绍与分析。
5.人们发现鲔科模式(鲨鱼、金枪鱼类的游动模式)是效率最高、游速最快、机动性最好的推进模式。如采用该种推进模式,水下无人柔性航行器将变得更为节能,同时由于水下无人柔性航行器前部保持刚性,摆动较小,因而更加有利于内部设备元件的布局及传感设备的工作。
6.鲔科模式的游动通过摆动产生的推力的三个分量:1)尾部摆动引起尾部下游的卡门涡街的反向产生的涡推力(图1a);2)尾鳍摆动推动水的惯性力(图 1b)和3)尾鳍摆动时的尾鳍的前缘吸力(图1c)。
7.上述三部分推力分量中,尾部摆动造成反向卡门涡街提供的流动推力是最主要的部分。这是由于尾部和尾鳍摆动形成的反卡门涡街的旋转轴线一直都是垂直于水下数控电动缸前进的方向,也就使形成的有效推力的喷流平行于水下数控电动缸前进的方向(参见图1a)。
8.要形成卡门涡街,并且让其反向和实现流动控制,必须让尾臂(尾部去掉尾鳍的部分)和尾鳍的摆动按一定的规律运动。早在2000年美国麻省理工学院 (mit)在对鱼类推进机理都综述中已指出:鱼类的高效、高速源自涡控制;但只有当“机器鱼”尾部的波状游动处于最佳推进效率范围(即充分优化尾部的波状游动),“活鱼”才大大减阻,相对死鱼可减阻50%以上。
9.从鱼类游动的观察结果中已经发现鲨鱼和剑鱼等通过多关节柔性尾部摆动引起下游的卡门涡街的反向产生涡推力时,其多关节柔性尾部外形可根据观察数据拟合成按一定的波形、振幅和相位的关系的刚性强迫振动。如以“鱼体”的惯性中心为原点(约在鱼身长度的1/3到1/2处),沿伸至尾部,其曲线方程可近似表示为:
10.y(x,t)=(c1x+c2x2)sin(kx+ωt)
ꢀꢀꢀ
方程1
11.方程1中,y为尾部各点的横向位移;x为尾部的纵向坐标值,以鱼中部的惯性中心
为原点;c1、c2为线性波幅和二次波幅包络线系数;k为尾部身体波波数,k=2p/l;l为身体波波长,p为圆周率;ω为身体波振动圆频率。
12.这些参数对卡门涡街的反向产生的涡推力和流动控制有很大的影响。因此,尽管效率最高、游速最快、机动性最好的鲔科模式(鲨鱼、金枪鱼类的游动模式)的前部刚度很大,几乎保持刚性;身体波幅限制在身体的后半部,以获得硕大推力。
13.关于尾鳍上下和俯仰转动形成的卡门涡街,本发明在准备过程中曾进行过模拟尾鳍摆动所拖出的卡门涡街的水洞试验。实验中尾鳍作上下和俯仰的两自由度的运动。在尾鳍模型的上游设置了上下三条染色流线。当模型运动时,三条染色流线将显示了流动中的涡结构及其变化。实验的部分录像截图结果如图2 所示。当尾鳍刚开始向下运动时,尾鳍后缘形成一个逆时针旋转的分离涡(图 2a)。随后当尾鳍在向下运动时又开始俯仰转动,尾鳍后缘的以逆时针的旋转方向离开尾部,而在尾鳍前缘处又形成了一个顺时针旋转的分离涡(图2b)。当尾鳍继续向下和向上转动时,后缘涡继续流向下游,前缘分离涡开始向下游流动。这两个旋涡形成了第一对转向相反的涡街,而在前缘处又形成了第二个前缘涡 (图2c)。如此继续,就形成了向后的卡门涡街(图2d),从而产生涡的向前的推力。可以看出,这种涡街的强度和频率与尾鳍上下运动和俯仰转动的幅值与频率有关。
14.进一步,本发明在准备过程中也对方程1作了详细的演示计算。图3为一个摆动周期内无因次时间间隔为0.1个周期的尾部摆动曲线。图4为一个摆动周期内鱼体波的斜率变化曲线。图6为一个摆动周期内鱼体波的曲率,图7为一个摆动周期内鱼体波的曲率半径。从图中可以看出尾部摆动的斜率和曲率可正可负,而且从尾部的中段到尾部最为激烈。另外,需要说明在图6中,有三个奇点,其曲率为0,即x=0.05,0.125和0.325。在三个奇点上,曲率半径为
±
∞。
15.上面水洞试验和数字模拟的结果表明,人造柔性航行器的身体后半部的摆动必须按照一定的波形和频率来进行才能获得大的推力和控制力。而且在尾部即的区间是曲率最大也是变化最大的区间。为了反映这种变化,人造柔性航行器的相应部分的隔框距离要比其它部分更短才对。
16.另外,需要指出,除了曲率变化的因素外,上述鱼的尾臂和尾鳍的作用和功能也不尽相同:尾鳍的摆动是产生卡门涡阶和涡推力的主要部件,但是尾鳍的摆动幅度和相位则由尾臂的摆动波形来形成,并且尾臂的摆动也使从尾臂流入尾鳍的流场中已经形成了一定的涡量,更有利于尾鳍后的反向卡门涡街的形成和强度。
17.因此,可以形象地说,尾鳍的摆动是发力元件,而尾臂的波动则是造势的元件,两者缺一不可。若不能模拟鲔科模式后体的运动,那只能得到观赏鱼的效果。这也是现有各种人造的“柔性”航行器只能达到最多每小时几公里的速度,以至满足不了实用需要的重要原因之一。
18.需要指出,方程1只是根据鱼类游动的观察测量的拟合结果。这些观察得到的拟合结果有待实际的验证,更有待通过更改运动参数进一步优化和扩展。因此,从发明专利的角度,不仅要将仿生鱼的后半部隔框加密,而且要给隔框的摆动留下可以任意改变的函数曲线的可能。只有这样才能既核验方程1的正确性,并根据具体要求创造性地发明和发现最佳的鱼尾的摆动形式和函数。
19.cn109110095b公开了一种张拉整体式摆动推进机构,包括头部、柔性躯干和尾部,
头部通过柔性躯干和尾部连接,头部内设置有驱动系统,所述的柔性躯干包括多组张拉浮动式柔性关节,每组张拉浮动式柔性关节包括基础平台、从动平台和多组张力元件,所述的基础平台的上面结构与从动平台的下面结构通过多组水平的张力元件连接,所述的基础平台的上面结构与从动平台的上面结构件通过多组轴向的张力元件连接,从而能够悬浮支撑起从动平台,每组张拉浮动式柔性关节从而依次互相串连。张拉整体式摆动推进机构的动力源采用大扭矩的舵机,或者直流电机等来牵引绳动作,从而对机器鱼进行模态激励。舵机使用螺栓固定在第一平台上,舵机旋转带动其舵机自带的一字型摇臂,通过两根钢丝绳将驱动力矩传递到第六平台,即驱动平台上,以实现张拉整体式摆动推进机构的摆动。舵机的一字摇臂、两跟钢丝绳与需要驱动的平台构成一个平行四边形,舵机输出的转角就是驱动装置输出的转角。该方案通过改变冗余驱动内力(各个支腿的内力)而改变系统刚度,进而调整系统的固有频率,使系统的频率响应改变。但是,对刚性强迫振动而言,系统的主要运动参数如频率等则主要由外加的刚性强迫振动频率决定。频率比只影响波形的仿射变化系数。如果频率比相差较远,则系统的运动波形则主要由外加的刚性强迫振动决定。另外,该方案中只有一个舵机作为动力源,又不能在使用中调节原设置的刚度。因此,该方案无法做到让尾部按一定的波形、振幅和相位进行刚性强迫振动运动,导致其推进速度和推进力较低。
20.cn102673759b公开了一种变刚度仿生摆动推进装置,cn103224017b公开了一种变刚度的平面串并联数控可变波形的多关节柔性水下仿生推进器,这两种方案均均是由首端单个驱动源通过各结构单元刚度的调整来产生相邻单元所需的驱动激励,控制相应结构单元的摆动幅度,从而使整个平面串并联结构成为具有一定刚度的柔性体。但是,从图5和图6显示的一个摆动周期内鱼体波的曲率和曲率半径可以看出曲率可正可负。而这两个方案只能使鱼尾沿单曲线方向变化,是不可能完全拟合给定的曲线。加以这两个方案使用的都是弹性振动的原理,它的解与给定的系统的刚度、转动惯量以及阻尼有关。例如对最简单的刚度、转动惯量及阻尼均为常数的线性系统,系统常微分方程为:
[0021][0022]
其中,i是系统的转动惯量,包括变刚度的仿生摆动体的转动惯量和摆动体摆动时推动周围液体的惯量,c是摆动体的结构阻尼和周围液体流动的内阻尼, k是系统的刚度。
[0023]
如果方程中的各参数保持不变,则上述为常微分方程,其解为:
[0024]
θ=θ0cos(ωt-φ)
[0025][0026]
从上述方程中可以证实,方程的解不但与系统的刚度有关,而且与系统的转动惯量及阻尼有关。
[0027]
另外,从图3所示的一个摆动周期内无因次时间间隔为0.1个周期的尾部摆动曲线可以看出,这样的曲率和波形的变化是不可能用首部隔框驱动,而其余部分仅用变刚度来完成的。
技术实现要素:
[0028]
本发明的目的是为了解决上述现有技术的不足,提供一种数控可变波形的多关节柔性水下仿生推进器及其控制方法,在相邻的两组隔框之间均设有数控电动缸,采用刚性强迫运动的原理,以实现鱼体波的精确拟合,拟合过程不需要复杂的刚度计算,控制更加精确、简单,并且能够模拟鱼体的双曲线摆动。
[0029]
所要解决的技术问题采用以下技术方案来实现:一种数控可变波形的多关节柔性水下仿生推进器,其特征在于,包括隔框、连杆、数控电动缸;所述隔框通过连杆串连;所述连杆的前端与其前邻隔框的中心枢接,所述连杆的后端与其后邻隔框的中心刚性连接,或者,所述连杆的前端与其前邻隔框的中心刚性连接,所述连杆的后端与其后邻隔框的中心枢接;所述数控电动缸设在相邻的隔框之间,所述数控电动缸的两端分别与相邻的两个隔框枢接。
[0030]
相对于现有技术,本发明的数控可变波形的多关节柔性水下仿生推进器的有益效果为:
[0031]
(1)相邻的两组隔框之间均设有数控电动缸,当数控可变波形的多关节柔性水下仿生推进器游动时,通过数控电动缸以实现相应隔框的左右摆动和摆动幅度,最终实现游动波型的精确拟合。相对于现有技术,本发明数控可变波形的多关节柔性水下仿生推进器的拟合过程不需要复杂的刚度计算,控制更加精确、简单。
[0032]
(2)数控可变波形的多关节柔性水下仿生推进器采用刚性强迫运动的原理,为各关节提供了足够的强迫力或力矩,相对于现有技术的弹性振动,本发明的数控可变波形的多关节柔性水下仿生推进器能较准确地模拟鱼体的双曲线摆动。
[0033]
(3)通过改变数控电动缸的驱动幅度、频率和相邻隔框之间相位,就可使数控可变波形的多关节柔性水下仿生推进器摆动频率和相位改变,形成如鱼一样的摆动,并能够实现在不同运动要求下的摆动波形的形成和控制,从而改变外部涡量场的结构,达到提高航行器的流体动力学性能的目的并提供所需的推力。
[0034]
本发明的技术方案还有,还包括弹性密封蒙皮,所述弹性密封蒙皮包覆在隔框的外部。
[0035]
本发明的技术方案还有,所述隔框的外端设有外缘保护端头。采用本技术方案,外圆保护端头能够防止隔框与弹性密封蒙皮直接接触,进而防止弹性密封蒙皮损坏。
[0036]
本发明还提供了一种使用上述的数控可变波形的多关节柔性水下仿生推进器的控制方法,包括以下步骤:
[0037]
s1:选取鱼体波形成的包络线作为所要拟合的曲线,由生物观测得到;
[0038]
s2:在所要拟合的曲线上取多个节点,节点之间通过折线段连接;
[0039]
s3:将多段折线段与数控可变波形的多关节柔性水下仿生推进器对应,即,隔框的中心a、d对应节点,连杆对应折线段,a为连杆前邻隔框的中心,d为连杆后邻隔框的中心;由此确定隔框的个数、连杆的长度l;
[0040]
s4:确定数控电动缸与其前邻隔框的枢接点b、数控电动缸与其后邻隔框的枢接点c,并由此确定a与b的距离d1、a与c的距离d2;
[0041]
s5:测量线段bc的长度,得到数控电动缸的长度δ,至此,完成数控可变波形的多关节柔性水下仿生推进器对鱼体波的拟合;
[0042]
s6:根据鱼体波,按照预设频率,向数控电动缸输入伸缩指令。
[0043]
相对于现有技术,本发明的数控可变波形的多关节柔性水下仿生推进器控制方法的有益效果为:(1)当数控可变波形的多关节柔性水下仿生推进器模拟鱼体游动时,将数字电动缸作为控制输入,以实现鱼体波的精确拟合。相对于现有技术,本发明数控可变波形的多关节柔性水下仿生推进器的拟合过程不需要复杂的刚度计算,控制更加精确、简单;(2)采用串连多关节刚性强迫运动的原理,各关节通过选择不同推力的数字电动缸,以提供足够的强迫力或力矩,本发明就能够在各种游动条件下模拟鱼体的摆动波形;(3)由于能更准确地模拟快速游动的鱼类的游动波形,本发明的数控可变波形的多关节柔性水下仿生推进器可以得到高速和机动游动的效果;(4)由于本发明的方法可以任意而且很容易地改变尾部和尾鳍的摆动波形,本发明不但可以验证已有的快速鱼类的游动效果,而且可以在实践中获得更丰富的实践经验和数据。
附图说明
[0044]
图1为鲔科鱼类尾部摆动所产生的三种推进力机制示意图。
[0045]
图2为模拟尾鳍摆动拖出的卡门涡街的水洞试验的部分录像截图。
[0046]
图3为一个摆动周期内无因次时间间隔为0.1个周期的尾部摆动曲线。
[0047]
图4为一个摆动周期内鱼体波的斜率。
[0048]
图5为一个摆动周期内鱼体波曲线的二阶导数
[0049]
图6为一个摆动周期内鱼体波的曲率。
[0050]
图7为一个摆动周期内鱼体波的曲率半径。
[0051]
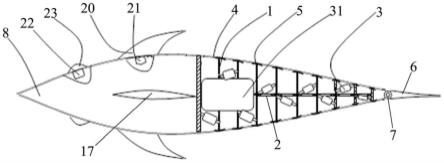
图8为实施例1中水下无人柔性航行器的俯视图。
[0052]
图9为实施例1中水下无人柔性航行器的侧视图。
[0053]
图10为实施例1中数控电动缸的结构示意图。
[0054]
图11为实施例1中数控可变波形的多关节柔性水下仿生推进器拟合鲔科模式尾部摆动示意图。
[0055]
图12为实施例1中确定数控电动缸长度的几何示意图。
[0056]
图中:1、隔框,2、连杆,3、数控电动缸,4、弹性密封蒙皮,5、外缘保护端头,6、尾鳍,7、尾鳍舵机,8、头部,9、水平平衡器,10、外需工作载荷,11、惯导,12、激光发生器,13、电脑,14、电源,15、多波束,16、沉浮平衡器,17、背鳍,18、背鳍舵机,19、天线,20、胸鳍,21、胸鳍舵机, 22、侧向探视镜,23、侧向声呐,24、壳体,25、平衡器活塞,26、直线电机, 27、气体腔,28、液体腔,29、通气口,30、液体口,31、电源。
具体实施方式
[0057]
为了使得本公开的技术方案的目的、技术方案和优点更加清楚,下文中将结合本公开具体实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。附图中相同的附图标记代表相同的部件。需要说明的是,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
[0058]
除非另作定义,此处使用的技术术语或者科学术语应当为本公开所属领域内具有
一般技能的人士所理解的通常意义。本公开专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
[0059]
实施例1
[0060]
图8-图12示出了本发明的实施例1。
[0061]
如图8、图9所示,一种水下无人柔性航行器,包括模拟鱼头的头部8和模拟鱼体的数控可变波形的多关节柔性水下仿生推进器。
[0062]
所述头部8采用玻璃钢或碳纤维材质,所述头部8的内部设有密闭腔体,所述密闭腔体内设有水平平衡器9、外需工作载荷10、惯导11、激光发生器12、电脑13、电源14、沉浮平衡器16。所述头部8的顶部中心设有背鳍17和背鳍舵机18,所述背鳍舵机18能够驱动背鳍17相对于头部8摆动。所述背鳍17上设有天线19,用于发射和接收信号。所述头部8的两侧设有胸鳍20和胸鳍舵机 21,所述胸鳍舵机21能够驱动胸鳍20相对于头部8摆动。所述头部8的前部两侧还设有侧向探视镜22和侧向声呐23。所述头部8的下部设有多波束15。
[0063]
如图10所示,所述沉浮平衡器16包括壳体24、平衡器活塞25、直线电机26。所述平衡器活塞25滑动安装于壳体24内,并将壳体24分隔为气体腔27 和液体腔28。所述壳体24上设有与气体腔27连通的通气口29、与液体腔28 连通的液体口30。所述直线电机26用于控制平衡器活塞25相对于壳体24滑动。通过平衡器活塞25相对于壳体24的滑动,改变壳体24内气体和液体的比例,以实现水下无人柔性航行器的沉浮。
[0064]
所述数控可变波形的多关节柔性水下仿生推进器包括隔框1、连杆2、数控电动缸、弹性密封蒙皮4、尾鳍6和尾鳍舵机7。
[0065]
所述隔框1用于模拟鱼肋骨,所述连杆2用于模拟鱼脊椎。十个所述隔框1 通过连杆2串连,所述连杆2的前端与其前邻隔框1的中心枢接,所述连杆2 的后端与其后邻隔框1的中心刚性连接。首端的隔框1与头部8刚性连接。
[0066]
所述数控电动缸设在相邻的隔框1之间,所述数控电动缸3的两端分别与相邻的两个隔框1枢接。
[0067]
所述弹性密封蒙皮4包覆在隔框1的外部。
[0068]
所述隔框1的外端设有外缘保护端头5。外圆保护端头25采用橡胶制成,能够防止隔框1与弹性密封蒙皮4直接接触,进而防止弹性密封蒙皮4损坏。
[0069]
所述尾鳍6和尾鳍舵机7安装在末端隔框1的后端,所述尾鳍舵机7能够驱动尾鳍6相对于末端隔框7左右摆动。尾鳍6摆动能够控制推进方向,而且,尾鳍6摆动推动水的惯性力和尾鳍6摆动时的尾鳍前缘吸力均能够产生推进力。
[0070]
本实施例中由放于头部8密封腔体内的电脑13控制,通过实践得到各种不同环境和不同工况下的控制函数和程序并储存于水下无人柔性航行器的电脑13 中。就实际应用来说,只要有“快速、慢速、停滞和左右转弯等五种模式就可以基本满足需要。
[0071]
当水下无人柔性航行器在游动时,流体动力就会对胸鳍20和背鳍17的转动产生反作用,并提供相应的控制力矩。胸鳍20和背鳍17的转动与流速和转动方向的要求有关。本实施例通过水下无人柔性航行器的惯导11、胸鳍舵机21、背鳍舵机18控制胸鳍20和背鳍17的转动,以满足游动的指令。
[0072]
当需要水下无人柔性航行器潜伏在某些环境时,水下无人柔性航行器可以将环境液体注入沉浮平衡器16的液体腔28中,使水下无人柔性航行器在适当水域处于“睡眠”状态;一旦需要,可以将液体腔28中的环境液体排空,使水下无人柔性航行器从“睡眠”状态进入工作状态,满足特种工作指令。
[0073]
根据对水下无人柔性航行器需要实现的功能要求(表1),水下无人柔性航行器需要通过数控可变波形的多关节柔性水下仿生推进器的摆动实现快速前进、巡航、停滞、左右转弯等功能。而且这些功能的实际效果与水流速度、地形地貌等有关。因此,在提供产品前要对已生产的同一批水下无人柔性航行器进行数控可变波形的多关节柔性水下仿生推进器摆动和相应功能进行测试,并把有关数据和相应的控制数据录入计算机的存储器中,以便根据对数控可变波形的多关节柔性水下仿生推进器的航行要求编制有关程序。该控制系统包括自动控制和遥控控制两种功能。自动控制是根据预先设置的目标由航行器内的自动导航系统引导航行器到达指定的目标。遥控控制是由操作手引导航行器到达任意指定的目标。
[0074]
表1水下无人柔性航行器的几种可实现的功能要求
[0075]
功能1快速前进功能2巡航功能3停滞功能4左转功能5右转功能6上浮功能7下沉
[0076]
本实施例还提供了一种使用本实施例的数控可变波形的多关节柔性水下仿生推进器控制方法,包括以下步骤:
[0077]
s1:选取鱼体波形成的包络线作为所要拟合的曲线,由生物观测得到;
[0078]
s2:通过无偏差最小方差估计法,在所要拟合的曲线上取多个节点,节点之间通过折线段连接;
[0079]
s3:将多段折线段与数控可变波形的多关节柔性水下仿生推进器对应,即,隔框1的中心a、d对应节点,连杆2对应折线段,a为连杆前邻隔框的中心, d为连杆后邻隔框的中心;由此确定隔框1的个数、连杆2的长度l;通过图8 可见,在俯视方向,连杆2的投影垂直于隔框1的投影,l指连杆2投影的长度;
[0080]
优选的,隔框1的距离可根据所要拟合的曲线的曲率大小来选定,如图11 所示,在鱼尾的后半部因为曲率较大,曲率半径较小,又接近尾鳍,可以选择密一点;
[0081]
s4:确定数控电动缸3与其前邻隔框1的枢接点b、数控电动缸3与其后邻隔框1的枢接点c,并由此确定a与b的距离d1、a与c的距离d2;
[0082]
s5:测量线段bc的长度,得到数控电动缸3的长度δ,至此,完成数控可变波形的多
关节柔性水下仿生推进器对鱼体波的拟合;
[0083]
s6:根据鱼体波,按照预设频率,向数控电动缸3输入伸缩指令。
[0084]
以上所述,仅为本公开的具体实施方式,但本公开实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开实施例揭露的技术范围内或者在本公开实施例揭露的思想下,可轻易想到变化、替换或组合,都应涵盖在本公开实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1