一种深海自主水下机器人自锁式舵机
1.本发明属于自主水下机器人技术领域,特别涉及一种深海自主水下机器人自锁式舵机。
背景技术:
2.随着自主水下机器人技术的不断进步与发展,多种深海水下机器人的研制相继开展。舵机作为水下机器人姿态调整的核心部件,对水下机器人的控制性能起着至关重要的作用。传统的舵机控制精度低、自锁能力弱,不具备抵抗深海环境压力的能力。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种深海自主水下机器人自锁式舵机,以解决传统的舵机控制精度低、自锁能力弱,不具备抵抗深海环境压力的能力的问题。
4.为了实现上述目的,本发明采用以下技术方案:
5.本发明提供一种深海自主水下机器人自锁式舵机,包括舵机本体、压力补偿器及分线舱,其中分线舱通过油管组件与舵机本体和压力补偿器连接;分线舱的上端安装有水密连接器,舵机本体的供电电缆和信号电缆穿过油管组件与水密连接器连接,压力补偿器用于舵机本体的冲油压力补偿。
6.所述舵机本体包括密封舱及设置于所述密封舱内且依次连接的无刷电机、行星减速机和涡轮蜗杆机构,无刷电机与所述供电电缆连接。
7.所述涡轮蜗杆机构包括蜗杆、涡轮、舵轴及角度编码器,其中蜗杆与所述行星减速机的输出端连接,舵轴与蜗杆垂直设置,涡轮设置于舵轴上且与蜗杆啮合;角度编码器设置于舵轴的后端,角度编码器与所述信号电缆连接。
8.所述密封舱包括相互连接的主密封舱和电机密封舱;
9.所述无刷电机和所述行星减速机容置于电机密封舱内;所述蜗杆、舵轴及涡轮容置于主密封舱内,且所述蜗杆的两端通过轴承ⅰ支撑;所述舵轴的两端通过轴承ⅱ支撑。
10.所述蜗杆的前端设有涡杆轴前端盖,涡杆轴前端盖与所述主密封舱密封连接。
11.所述无刷电机的后端设有涡杆轴后端盖,涡杆轴后端盖与所述电机密封舱的端部密封连接;所述涡杆轴后端盖与一路所述油管组件连接,所述供电电缆穿过一路所述油管组件。
12.所述舵轴的前端设有动密封端盖,动密封端盖与所述主密封舱密封连接。
13.所述角度编码器包括角度编码器定子、角度编码器转子、编码器端盖及编码器密封盖,其中角度编码器转子固设于所述舵轴的末端;编码器端盖与所述舵轴转动连接,且与所述主密封舱密封连接;角度编码器定子设置于编码器端盖的内壁上,且与角度编码器转子相对应;编码器密封盖与编码器端盖密封连接。
14.所述编码器密封盖与另一路所述油管组件连接,所述信号电缆穿过另一路所述油管组件。
15.本发明与现有舵机比较,其优点及有益效果是:本发明提供的一种深海自主水下机器人自锁式舵机,设置压力补偿器,通过冲油压力补偿,能够满足自主水下机器人深海环境下的工作要求。
16.本发明通过涡轮蜗杆的传动,实现了舵轴的反行程自锁,舵机实现了机械自锁能力,能够保证自主水下机器人维持舵面的稳定。
17.本发明在舵机的输出端设置了角度编码器,进行舵角的反馈,实现舵机的闭环控制,控制进度高,从而实现自主水下机器人的高精度的转向与俯仰运动。
附图说明
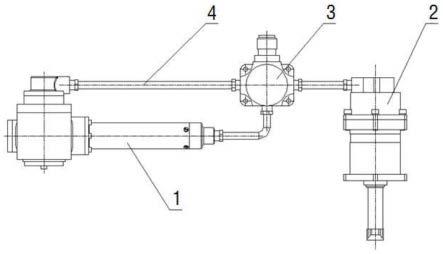
18.图1是本发明一种深海自主水下机器人自锁式舵机的结构示意图;
19.图2是本发明中舵机本体的结构示意图;
20.图3是图2的a-a剖视图;
21.图中:1为舵机本体,2为压力补偿器,3为分线舱,4为油管组件,5为无刷电机,6为角度编码器定子,7为供电电缆,8为信号电缆,10为电机密封舱,11为蜗杆,12为涡轮,13为主密封舱,15为轴承ⅰ,16为行星减速机,17为舵轴,18为轴承ⅱ,19为角度编码器转子,20为动密封端盖,21为编码器端盖,22为编码器密封盖,23为涡杆轴前端盖,24为涡杆轴后端盖。
具体实施方式
22.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
23.如图1所示,本发明提供的一种深海自主水下机器人自锁式舵机,包括舵机本体1、压力补偿器2及分线舱3,其中分线舱3通过油管组件4与舵机本体1和压力补偿器2连接;分线舱3的上端安装有水密连接器,舵机本体1的供电电缆7和信号电缆8穿过油管组件4与水密连接器连接。水密连接器用于舵机本体1的供电及信号检测,压力补偿器2用于舵机本体1的冲油压力补偿。
24.如图2所示,本发明的实施例中,舵机本体1包括密封舱及设置于密封舱内的无刷电机5、行星减速机16和涡轮蜗杆机构,无刷电机5的输出端与行星减速机16的输入端连接,行星减速机16的输出端与涡轮蜗杆机构连接,实现动力的传输。
25.如图2-3所示,本发明的实施例中,涡轮蜗杆机构包括蜗杆11、涡轮12、舵轴17及角度编码器,其中蜗杆11与行星减速机16的输出端连接,舵轴17与蜗杆11垂直设置,涡轮12套设于舵轴17上且通过平键连接,涡轮12与蜗杆11啮合;角度编码器设置于舵轴17的后端,且通过螺母固定,角度编码器与信号电缆8连接。
26.本发明的实施例中,密封舱包括相互连接的主密封舱13和电机密封舱10;无刷电机5和行星减速机16容置于电机密封舱10内,且通过螺钉固定。蜗杆11、舵轴17及涡轮12容置于主密封舱13内。蜗杆11与无刷电机5和行星减速机16同轴设置,蜗杆11的两端通过轴承ⅰ15支撑;舵轴17的两端通过轴承ⅱ18支撑。
27.进一步地,蜗杆11的前端设有涡杆轴前端盖23,涡杆轴前端盖23与主密封舱13密封连接。无刷电机5的后端设有涡杆轴后端盖24,涡杆轴后端盖24与电机密封舱10的端部密封连接;涡杆轴后端盖24与一路油管组件4连接,供电电缆7穿过该一路油管组件4。
28.进一步地,舵轴17的前端设有动密封端盖20,动密封端盖20与主密封舱13密封连接。舵轴17从主密封舱13中由动密封端盖20穿出,舵轴17与动密封端盖20通过o型密封圈实现动密封,动密封端盖20与主密封舱13通过o型密封圈实现径向密封。
29.本发明的实施例中,角度编码器包括角度编码器定子6、角度编码器转子19、编码器端盖21及编码器密封盖22,其中角度编码器转子19固设于舵轴17的末端;编码器端盖21与舵轴17转动连接,编码器端盖21通过o型密封圈与主密封舱13实现径向密封;角度编码器定子6设置于编码器端盖21的内壁上,且与角度编码器转子19相对应;编码器密封盖22与编码器端盖21密封连接。编码器密封盖22与另一路油管组件4连接,信号电缆8穿过该另一路油管组件4。
30.具体地,主密封舱13与电机密封舱10、编码器密封盖22、动密封端盖20、编码器端盖21、涡杆轴前端盖23及涡杆轴后端盖24,均通过o型密封圈连接实现径向密封,通过均匀布置的螺钉实现固定,实现舵机本体1的整体密封。
31.本发明的实施例中,分线舱3的左端和下端分别通过两路油管组件4和舵机本体1相连,分线舱3的右端通过第三路油管组件4安装压力补偿器2,使舵机本体1的内部压力大于外界环境的压力。无刷电机5的供电电缆7和角度编码器定子的信号电缆8,分别穿过两路油管组件4与分线舱3的水密连接器进行连接,通过外部控制电路相连,控制电路根据角度编码器的信息能精确的控制和保持输出轴的角度,为自主水下机器人舵面提供驱动力,从而实现自主水下机器人的转向与俯仰运动。舵机本体1通过涡轮、蜗杆传动实现反行程自锁,舵机具备机械自锁的能力。
32.本发明提供的一种自主水下机器人自锁式舵机,通过设置压力补偿器,使舵机的内部压力大于外界环境的压力。舵机设置一个角度编码器检测输出轴转动角度,控制电路根据角度编码器的信息能精确的控制和保持输出轴的角度。本发明的舵机具有尺寸小、精度高、密封安全、自锁功能等特点,适合应用在深海自主水下机器人上,为舵面提供驱动力,从而实现自主水下机器人的转向与俯仰运动。
33.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1