1.本发明属于海上作业用稳定克令吊技术领域,特别涉及一种负载自平衡摇摆补偿海上作业克令吊。
背景技术:
2.船用起重机装置,又称船用克令吊,属于船用货物过泊设备,船舶等海上浮体,在风浪涌的作用下,会产生六自由度的运动,即:横荡、纵荡、垂荡、横摇、纵摇、艏摇。此多维运动会对货物过驳造成严重影响,且产生很大安全隐患。因此,对传统克令吊进行改进和改造时十分迫切且必要的。
3.现有船用克令吊防晃技术有采用并联机构防晃,有采用支撑臂支承防晃。现有克令吊防晃存在控制部分过多的问题,且驱动力多为数倍负载,大偏载下驱动装置受力大,整体集成度较低,结构较为复杂,设计成本高且适应海况低。由此,需要设计一种驱动效率高、结构紧凑、集成度高的船用克令吊。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种负载自平衡摇摆补偿海上作业克令吊,采用串并混联的机械结构能大幅度补偿风浪涌对船舶的影响,同时通过设置多对滑轮组,有利于大幅减轻对各直线驱动器的受力,使用场景广泛,具有结构紧凑、集成度高、补偿范围大等优点。
5.本发明采用的技术方案是一种负载自平衡摇摆补偿海上作业克令吊,其包括基座单元、回转平台、摇摆平台、塔身、吊臂、柔索、滑轮组和吊重提升绞车,所述基座单元与所述回转平台之间通过转盘轴承第一转动副连接,且所述回转驱动器驱动所述转盘轴承带动所述回转平台转动,所述摇摆平台设于所述回转平台上,且所述摇摆平台通过第二转动副与所述回转平台转动连接;所述塔身设于所述摇摆平台上,且所述塔身的下端通过第三转动副与所述摇摆平台中摇摆底板的中间部连接,所述塔身的前侧设有塔身面内摇摆直线驱动器,且所述塔身面内摇摆直线驱动器的下端通过第四转动副与所述摇摆底板的前端连接,所述塔身面内摇摆直线驱动器的上端通过第五转动副与所述塔身的中间部连接,且所述塔身的左右两侧对称设有塔身面外摇摆直线驱动器,所述塔身面外摇摆直线驱动器的下端通过万向铰链与所述回转平台连接,且所述塔身面外摇摆直线驱动器的上端通过第八转动副与所述塔身的中间部连接,所述吊臂设于所述塔身上,且所述吊臂后端的底部通过第九转动副与所述塔身的上端连接,所述吊臂与所述塔身之间设有吊臂面内俯仰直线驱动器,且所述吊臂面内俯仰直线驱动器的下端通过第十转动副与所述塔身连接,所述吊臂面内俯仰直线驱动器的上端通过第十一转动副与所述吊臂连接,所述滑轮组包括吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组和升沉直线驱动器滑轮组,所述吊臂尾部滑轮组通过第十二转动副与所述吊臂的后端连接,且所述塔身滑轮组通过第十三转动副与所述塔身的后侧连接,所述摇摆后立板滑轮组通过第十四转动副与所述摇摆平台中摇摆后立板的上端连
接,且所述摇摆后立板上设有升沉直线驱动器,所述升沉直线驱动器的上端通过第十五转动副与所述升沉直线驱动器滑轮组连接,且所述升沉直线驱动器滑轮组两端的导向滑块与所述摇摆平台中的直线导轨滑动连接;所述吊重提升绞车设于所述摇摆底板上,所述柔索的第一端与所述吊臂的前端连接,且所述柔索的第二端依次绕过所述吊臂的吊钩、吊臂前端滑轮、吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组以及所述升沉直线驱动器滑轮组与所述吊重提升绞车连接。
6.优选地,所述吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组以及升沉直线驱动器滑轮组中均包含多个滑轮,且所述吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组以及升沉直线驱动器滑轮组中滑轮数量分别为n个、2n-1个、2n个以及n个。
7.进一步地,所述柔索的第一端设于吊臂的前端,且所述柔索的第二端绕过所述吊臂前端滑轮、所述吊臂尾部滑轮组中的第一个滑轮、所述塔身滑轮组中的第一个滑轮、所述摇摆后立板滑轮组中的第一个滑轮、所述升沉直线驱动器滑轮组中的第一个滑轮后,并继续依次缠绕于所述摇摆后立板滑轮组中的第二个滑轮、所述塔身滑轮组中的第二个滑轮、所述吊臂尾部滑轮组中的第二个滑轮,直至缠绕于所述升沉直线驱动器滑轮组中的第n个滑轮以及所述摇摆后立板滑轮组中的第2n个滑轮后,与所述吊重提升绞车连接。
8.优选地,所述第一转动副的中心轴线垂直于所述第二转动副的中心轴线,所述第二转动副的中心轴线与所述第三转动副的中心轴线垂直且相交,且所述第三转动副的中心轴线平行于所述第四转动副的中心轴线以及所述第五转动副的中心轴线,所述万向铰中的第六转动副的中心轴线与第七转动副的中心轴线垂直且相交,且所述第七转动副的中心轴线与所述第三转动副的中心轴线共线,所述第八转动副的中心轴线平行于第六转动副的中心轴线,且所述第九转动副的中心轴线、第十转动副的中心轴线、第十一转动副的中心轴线、第十二转动副的中心轴线、第十三转动副的中心轴线、第十四转动副的中心轴线以及所述第十五转动副的中心轴线均平行于所述第三转动副中心轴线。
9.本发明的第二方面,提供一种负载自平衡摇摆补偿海上作业克令吊,其包括基座单元、回转平台、摇摆平台、塔身、吊臂、柔索、滑轮组和吊重提升绞车,所述基座单元与所述回转平台之间通过转盘轴承第一转动副连接,且所述回转驱动器驱动所述转盘轴承带动所述回转平台转动,所述摇摆平台设于所述回转平台上,且所述摇摆平台通过第二转动副与所述回转平台转动连接;所述塔身设于所述摇摆平台上,且所述塔身的下端通过第三转动副与所述摇摆平台中摇摆底板的中间部连接,所述塔身的前侧设有塔身面内摇摆直线驱动器,且所述塔身面内摇摆直线驱动器的下端通过第四转动副与所述摇摆底板的前端连接,所述塔身面内摇摆直线驱动器的上端通过第五转动副与所述塔身的中间部连接,且所述塔身的左右两侧对称设有塔身面外摇摆直线驱动器,所述塔身面外摇摆直线驱动器的下端通过万向铰链与所述回转平台连接,且所述塔身面外摇摆直线驱动器的上端通过第八转动副与所述塔身的中间部连接,所述吊臂设于所述塔身上,且所述吊臂后端的底部通过第九转动副与所述塔身的上端连接,所述吊臂与所述塔身之间设有吊臂面内俯仰直线驱动器,且所述吊臂面内俯仰直线驱动器的下端通过第十转动副与所述塔身连接,所述吊臂面内俯仰直线驱动器的上端通过第十一转动副与所述吊臂连接,所述滑轮组包括吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组、升沉直线驱动器滑轮组和吊臂中部滑轮组,所述吊臂尾部滑轮组通过第十二转动副与所述吊臂的后端连接,且所述塔身滑轮组通过第十三转动副与
所述塔身的后侧连接,所述摇摆后立板滑轮组通过第十四转动副与所述摇摆平台中摇摆后立板的上端连接,且所述吊臂的上端设有升沉直线驱动器,所述升沉直线驱动器的固定端通过第十五转动副与所述吊臂连接,且所述升沉直线驱动器的伸缩端通过第十六转动副与所述吊臂摇摆门架连接,且所述吊臂摇摆门架的下端通过第十九转动副与所述吊臂连接,所述升沉直线驱动器滑轮组通过第十八转动副设于所述吊臂摇摆门架的上端,所述吊臂中部滑轮组通过第十七转动副与所述吊臂连接,且所述吊臂中部滑轮组位于所述升沉直线驱动器的前端;所述吊重提升绞车设于所述摇摆底板上,所述柔索的第一端与所述吊臂的前端连接,且所述柔索的第二端依次绕过所述吊臂的吊钩、吊臂前端滑轮、升沉直线驱动器滑轮组、吊臂中部滑轮组、吊臂尾部滑轮组、塔身滑轮组以及摇摆后立板滑轮组与所述吊重提升绞车连接。
10.优选地,所述升沉直线驱动器滑轮组、吊臂中部滑轮组、吊臂尾部滑轮组、塔身滑轮组以及摇摆后立板滑轮组中均包含多个滑轮,且所述升沉直线驱动器滑轮组、吊臂中部滑轮组、吊臂尾部滑轮组、塔身滑轮组以及摇摆后立板滑轮组中滑轮数量分别为p个、p个、m个、2m-1个以及m个。
11.进一步地,所述柔索的第一端设于吊臂的前端,且所述柔索的第二端绕过所述吊臂前端滑轮、所述升沉直线驱动器滑轮组中的第一个滑轮、所述臂中部滑轮组中的第一个滑轮后,继续依次缠绕于所述升沉直线驱动器滑轮组中的第二个滑轮,直至缠绕于所述吊臂中部滑轮组中的第p个滑轮后,继续依次缠绕于所述吊臂尾部滑轮组中的第一个滑轮、塔身滑轮组中的第一个滑轮以及摇摆后立板滑轮组中的第一个滑轮后,继续依次缠绕于所述塔身滑轮组中的第二个滑轮以及所述吊臂尾部滑轮组中的第二个滑轮,直至缠绕于摇摆后立板滑轮组中的第m个滑轮后,与所述吊重提升绞车连接。
12.本发明的第三方面,提供一种负载自平衡摇摆补偿海上作业克令吊,其包括基座单元、回转平台、摇摆平台、塔身、吊臂、柔索、滑轮组和吊重提升绞车,所述基座单元与所述回转平台之间通过转盘轴承第一转动副连接,且所述回转驱动器驱动所述转盘轴承带动所述回转平台转动,所述摇摆平台设于所述回转平台上,且所述摇摆平台通过第二转动副与所述回转平台转动连接;所述塔身设于所述摇摆平台上,且所述塔身的下端通过第三转动副与所述摇摆平台中摇摆底板的中间部连接,所述塔身的左右两侧对称设有塔身斜侧摇摆直线驱动器,且所述塔身斜侧摇摆直线驱动器的下端通过万向铰链与所述回转平台连接,所述塔身斜侧摇摆直线驱动器的上端与所述塔身的中间部连接,所述吊臂设于所述塔身上,且所述吊臂后端的底部通过第九转动副与所述塔身的上端连接,所述吊臂与所述塔身之间设有吊臂面内俯仰直线驱动器,且所述吊臂面内俯仰直线驱动器的下端通过第十转动副与所述塔身连接,所述吊臂面内俯仰直线驱动器的上端通过第十一转动副与所述吊臂连接,所述滑轮组包括吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组和升沉直线驱动器滑轮组,所述吊臂尾部滑轮组通过第十二转动副与所述吊臂的后端连接,且所述塔身滑轮组通过第十三转动副与所述塔身的后侧连接,所述摇摆后立板滑轮组通过第十四转动副与所述摇摆平台中摇摆后立板的上端连接,且所述摇摆后立板上设有升沉直线驱动器,所述升沉直线驱动器的上端通过第十五转动副与所述升沉直线驱动器滑轮组连接,且所述升沉直线驱动器滑轮组两端的导向滑块与所述摇摆平台中的直线导轨滑动连接;所述吊重提升绞车设于所述摇摆底板上,所述柔索的第一端与所述吊臂的前端连接,且所述柔索的第二端
依次绕过所述吊臂的吊钩、吊臂前端滑轮、吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组以及所述升沉直线驱动器滑轮组与所述吊重提升绞车连接。
13.本发明的第四方面,提供一种负载自平衡摇摆补偿海上作业克令吊,其包括基座单元、回转平台、摇摆平台、塔身、吊臂、柔索、滑轮组和吊重提升绞车,所述基座单元与所述回转平台之间通过转盘轴承第一转动副连接,且所述回转驱动器驱动所述转盘轴承带动所述回转平台转动,所述摇摆平台设于所述回转平台上,且所述摇摆平台通过第二转动副与所述回转平台转动连接;所述塔身设于所述摇摆平台上,且所述塔身的下端通过第三转动副与所述摇摆平台中摇摆底板的中间部连接,所述塔身的四周均布有四个塔身斜侧摇摆直线驱动器,且所述塔身斜侧摇摆直线驱动器的下端通过万向铰链与所述回转平台连接,所述塔身斜侧摇摆直线驱动器的上端与所述塔身的中间部连接,所述吊臂设于所述塔身上,且所述吊臂后端的底部通过第九转动副与所述塔身的上端连接,所述吊臂与所述塔身之间设有吊臂面内俯仰直线驱动器,且所述吊臂面内俯仰直线驱动器的下端通过第十转动副与所述塔身连接,所述吊臂面内俯仰直线驱动器的上端通过第十一转动副与所述吊臂连接,所述滑轮组包括吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组和升沉直线驱动器滑轮组,所述吊臂尾部滑轮组通过第十二转动副与所述吊臂的后端连接,且所述塔身滑轮组通过第十三转动副与所述塔身的后侧连接,所述摇摆后立板滑轮组通过第十四转动副与所述摇摆平台中摇摆后立板的上端连接,且所述摇摆后立板上设有升沉直线驱动器,所述升沉直线驱动器的上端通过第十五转动副与所述升沉直线驱动器滑轮组连接,且所述升沉直线驱动器滑轮组两端的导向滑块与所述摇摆平台中的直线导轨滑动连接;所述吊重提升绞车设于所述摇摆底板上,所述柔索的第一端与所述吊臂的前端连接,且所述柔索的第二端依次绕过所述吊臂的吊钩、吊臂前端滑轮、吊臂尾部滑轮组、塔身滑轮组、摇摆后立板滑轮组以及所述升沉直线驱动器滑轮组与所述吊重提升绞车连接。
14.优选地,所述四个塔身斜侧摇摆直线驱动器均为液压缸,且所述四个液压缸包括第一液压缸、第二液压缸、第三液压缸和第四液压缸,所述第一液压缸与第三液压缸相对应,且所述第一液压缸的上腔与所述第三液压缸的下腔相连通并通过油管与液压系统中第一伺服阀的a口相连通,所述第一液压缸的下腔与所述第三液压缸的上腔相连通并通过油管与液压系统中第一伺服阀的b口相连通,所述第二液压缸与第四液压缸位置相对应,且所述第二液压缸的上腔与所述第四液压缸的下腔相连通并通过油管与液压系统中第二伺服阀的a口相连通,所述二液压缸的下腔与所述第四液压缸的上腔相连通并通过油管与液压系统中第二伺服阀的b口相连通,通过控制所述第一伺服阀和第二伺服阀,能实现所述塔身的面内面外摇摆补偿。
15.本发明的特点和有益效果是:
16.1、本发明提供的一种负载自平衡摇摆补偿海上作业克令吊,通过在吊臂与塔身之间设置吊臂面内俯仰直线驱动器,有利于实现吊臂和塔身中心所在面的晃动补偿,同时通过设置于塔身左右两侧的塔身面外摇摆直线驱动器,有利于实现吊臂和塔身中心所在面垂面方向的晃动补偿。
17.2、本发明提供的一种负载自平衡摇摆补偿海上作业克令吊,在摇摆平台、塔身以及吊臂上设置多组滑轮组,并通过柔索在多组滑轮组中的依次缠绕,有利于实现吊装作业时的偏载平衡,可以大幅减小吊臂面内俯仰直线驱动器所需驱动力,大大降低系统功率。
18.3、本发明提供的一种负载自平衡摇摆补偿海上作业克令吊,通过设置升沉直线驱动器,升沉直线驱动器可以快速响应带动升沉直线驱动器滑轮组在直线导轨中滑动,进而有利于实现对货物晃动的升沉补偿。
19.4、本发明提供的一种负载自平衡摇摆补偿海上作业克令吊,采用串并混联的机械结构能大幅度补偿风浪涌对船舶的影响,具有结构紧凑、集成度高、补偿范围大等优点。
附图说明
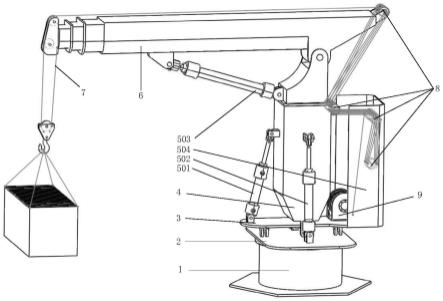
20.图1是本发明实施例1的整体结构示意图;
21.图2是本发明实施例1的摇摆平台结构示意图;
22.图3是本发明实施例1的吊臂结构示意图;
23.图4是本发明实施例1的柔索缠绕滑轮组示意图;
24.图5是本发明实施例1的部分转动副示意图;
25.图6是本发明实施例1的部分转动副示意图;
26.图7是本发明实施例2的整体结构示意图;
27.图8是本发明实施例3的整体结构示意图;
28.图9是本发明实施例3的部分转动副示意图;
29.图10是本发明实施例4的整体结构示意图;
30.图11是本发明实施例4的部分转动副示意图;
31.图12是本发明实施例5的整体结构示意图;
32.图13是本发明实施例5的部分转动副示意图。
33.主要附图标记:
34.1-基座单元;101-底座;102-转盘轴承;2-回转平台;3-摇摆平台;301-摇摆底板;302-摇摆后立板;303-直线导轨;4-塔身;501-塔身面内摇摆直线驱动器;502-塔身面外摇摆直线驱动器;503-吊臂面内俯仰直线驱动器;504-升沉直线驱动器;505-塔身斜侧摇摆直线驱动器;6-吊臂;601-吊臂头部滑轮;7-柔索;8-滑轮组;801-吊臂尾部滑轮组;802-塔身滑轮组;803-摇摆后立板滑轮组;804-升沉直线驱动器滑轮组;805-吊臂中部滑轮组;9-吊重提升绞车;10-操作台;11-吊臂摇摆门架;1
’‑
第一转动副;2
’‑
第二转动副;3
’‑
第三转动副;4
’‑
第四转动副;5
’‑
第五转动副;6
’‑
第六转动副;7
’‑
第七转动副;8
’‑
第八转动副;9
’‑
第九转动副;10
’‑
第十转动副;11
’‑
第十一转动副;12
’‑
第十二转动副;13
’‑
第十三转动副;14
’‑
第十四转动副;15
’‑
第十五转动副;16
’‑
第十六转动副;17
’‑
第十七转动副;18
’‑
第十八转动副;19
’‑
第十九转动副。
具体实施方式
35.为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
36.实施例1
37.本发明提供一种负载自平衡摇摆补偿海上作业克令吊,如图1~6所示,其包括基座单元1、回转平台2、摇摆平台3、塔身4、吊臂6、柔索7、滑轮组8和吊重提升绞车9,
38.如图2所示,基座单元1包括底座101、转盘轴承102和回转驱动器,底座101固定设
于海上作业船的甲板上,且转盘轴承102和回转驱动器均设于底座101上,回转驱动器能驱动转盘轴承102转动。基座单元1与回转平台2之间通过转盘轴承102第一转动副1’连接,第一转动副1’的中心轴线垂直于底座101平面和回转平台2平面,且回转驱动器驱动转盘轴承102带动回转平台2转动,摇摆平台3设于回转平台2上,摇摆平台3通过第二转动副2’与回转平台2转动连接,第二转动副2’的中心轴线垂直于第一转动副1’的中心轴线,且摇摆平台包括摇摆底板301、摇摆后立板302和直线导轨303,摇摆后立板302设于摇摆底板301的后端,且摇摆后立板302内侧对称设有直线导轨303。
39.在一种优选方式中,直线导轨303为c型导轨。
40.如图3所示,塔身4设于摇摆平台3上,且塔身4的下端通过第三转动副3’与摇摆平台3中摇摆底板301的中间部连接,第三转动副3’的中心轴线与第二转动副2’的中心轴线垂直且相交,塔身4的前侧设有塔身面内摇摆直线驱动器501,且塔身面内摇摆直线驱动器501的下端通过第四转动副4’与摇摆底板301的前端连接,第四转动副4’的中心轴线平行于第三转动副3’的中心轴线,塔身面内摇摆直线驱动器501的上端通过第五转动副5’与塔身4的中间部连接,第五转动副5’的中心轴线平行于第三转动副3’的中心轴线,且塔身4的左右两侧对称设有塔身面外摇摆直线驱动器502,塔身面外摇摆直线驱动器502的下端通过万向铰链与回转平台2连接,万向铰中的第六转动副6’的中心轴线与第七转动副7’的中心轴线垂直且相交,第七转动副7’的中心轴线与第三转动副3’的中心轴线共线,且塔身面外摇摆直线驱动器502的上端通过第八转动副8’与塔身4的中间部连接,第八转动副8’的中心轴线平行于第六转动副6’的中心轴线,吊臂6设于塔身4上,且吊臂6后端的底部通过第九转动副9’与塔身4的上端连接,第九转动副9’的中心轴线平行于第三转动副3’中心轴线,吊臂6与塔身4之间设有吊臂面内俯仰直线驱动器503,且吊臂面内俯仰直线驱动器503的下端通过第十转动副10’与塔身4连接,第十转动副10’的中心轴线平行于第三转动副3’中心轴线,吊臂面内俯仰直线驱动器503的上端通过第十一转动副11’与吊臂6连接,第十一转动副11’的中心轴线平行于第三转动副3’中心轴线,滑轮组8包括吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803和升沉直线驱动器滑轮组804,吊臂尾部滑轮组801通过第十二转动副12’与吊臂6的后端连接,且塔身滑轮组802通过第十三转动副13’与塔身4的后侧连接,摇摆后立板滑轮组803通过第十四转动副14’与摇摆平台3中摇摆后立板302的上端连接,且摇摆后立板302上设有升沉直线驱动器504,升沉直线驱动器504的上端通过第十五转动副15’与升沉直线驱动器滑轮组804连接,第十二转动副12’的中心轴线、第十三转动副13’的中心轴线、第十四转动副14’的中心轴线以及第十五转动副15’的中心轴线均平行于第三转动副3’中心轴线,且升沉直线驱动器滑轮组804两端的导向滑块与摇摆平台3中的直线导轨303滑动连接;吊重提升绞车9设于摇摆底板301上,柔索7的第一端与吊臂6的前端连接,且柔索7的第二端依次绕过吊臂6的吊钩、吊臂前端滑轮601、吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804与吊重提升绞车9连接。
41.如图4所示,吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804中均包含多个滑轮,且吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804中滑轮数量分别为n个、2n-1个、2n个以及n个,其中本实施中吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804中滑轮数量分别为四个、七个、八个以及四个。
42.如图4所示,柔索7的第一端设于吊臂6的前端,且柔索7的第二端绕过吊臂前端滑轮601、吊臂尾部滑轮组801中的第一个滑轮、塔身滑轮组802中的第一个滑轮、摇摆后立板滑轮组803中的第一个滑轮、升沉直线驱动器滑轮组804中的第一个滑轮后,并继续依次缠绕于摇摆后立板滑轮组803中的第二个滑轮、塔身滑轮组802中的第二个滑轮、吊臂尾部滑轮组801中的第二个滑轮,直至缠绕于升沉直线驱动器滑轮组804中的第四个滑轮以及摇摆后立板滑轮组803中的第八个滑轮后,与吊重提升绞车9连接。
43.本发明的具体工作过程如下:当船舶受到海浪影响而产生橫摇、纵摇、艏摇、横荡、纵荡和升沉运动时,固定在船舶甲板上克令吊的底座101也会随之运动,这个运动由底座101上的机构主动补偿,使吊臂6末端的位置始终相对作业对象固定;其中船舶橫摇主要由塔身面外摇摆直线驱动器502驱动摇摆平台3绕第二转动副2’转动补偿;船舶纵摇主要由塔身面内摇摆直线驱动器501驱动塔身4绕第三转动副3’转动补偿;船舶艏摇主要由回转平台2绕第一转动副1’转动来补偿;船舶横荡的补偿与船舶橫摇一同进行;船舶纵荡与船舶纵摇一同进行,同时也通过吊臂6的伸缩来补偿;船舶升沉运动主要由升沉直线驱动器504驱动柔索7进行补偿;船舶的混合运动最终是由各个驱动共同协调完成补偿,补偿的实现方式为当船舶受风浪涌运动的综合影响而向某一方向发生倾斜和位移时,克令吊的各驱动器会各自驱动一定的行程,使吊臂的位姿发生改变从而使末端执行器克服船舶的倾斜和位移;补偿最终表现为吊臂的末端执行器始终相对作业目标保持静止。
44.实施例2
45.本发明的第二方面,提供一种负载自平衡摇摆补偿海上作业克令吊,如图7所示,其包括基座单元、回转平台、摇摆平台、塔身、吊臂6、柔索7、滑轮组8和吊重提升绞车9。
46.如图7所示,基座单元1与回转平台2之间通过转盘轴承102第一转动副1’连接,且回转驱动器驱动转盘轴承102带动回转平台2转动,摇摆平台3设于回转平台2上,摇摆平台3通过第二转动副2’与回转平台2转动连接。
47.如图7所示,塔身4设于摇摆平台3上,且塔身4的下端通过第三转动副3’与摇摆平台3中摇摆底板301的中间部连接,塔身4的前侧设有塔身面内摇摆直线驱动器501,且塔身面内摇摆直线驱动器501的下端通过第四转动副4’与摇摆底板301的前端连接,塔身面内摇摆直线驱动器501的上端通过第五转动副5’与塔身4的中间部连接,且塔身4的左右两侧对称设有塔身面外摇摆直线驱动器502,塔身面外摇摆直线驱动器502的下端通过万向铰链与回转平台2连接,且塔身面外摇摆直线驱动器502的上端通过第八转动副8’与塔身4的中间部连接,吊臂6设于塔身4上,且吊臂6后端的底部通过第九转动副9’与塔身4的上端连接,吊臂6与塔身4之间设有吊臂面内俯仰直线驱动器503,且吊臂面内俯仰直线驱动器503的下端通过第十转动副10’与塔身4连接,吊臂面内俯仰直线驱动器503的上端通过第十一转动副11’与吊臂6连接,滑轮组8包括吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803、升沉直线驱动器滑轮组804和吊臂中部滑轮组805,吊臂尾部滑轮组801通过第十二转动副12’与吊臂6的后端连接,且塔身滑轮组802通过第十三转动副13’与塔身4的后侧连接,摇摆后立板滑轮组803通过第十四转动副14’与摇摆平台3中摇摆后立板302的上端连接,且吊臂6的上端设有升沉直线驱动器504,升沉直线驱动器504的固定端通过第十五转动副15’与吊臂6连接,且升沉直线驱动器504的伸缩端通过第十六转动副16’与吊臂摇摆门架11连接,且吊臂摇摆门架11的下端通过第十九转动副19’与吊臂6连接,升沉直线驱动器滑轮组
804通过第十八转动副18’设于吊臂摇摆门架11的上端,吊臂中部滑轮组805通过第十七转动副17’与吊臂6连接,且吊臂中部滑轮组805位于升沉直线驱动器504的前端;吊重提升绞车9设于摇摆底板301上,柔索7的第一端与吊臂6的前端连接,且柔索7的第二端依次绕过吊臂的吊钩、吊臂前端滑轮601、升沉直线驱动器滑轮组804、吊臂中部滑轮组805、吊臂尾部滑轮组801、塔身滑轮组802以及摇摆后立板滑轮组803与吊重提升绞车9连接。
48.如图7所示,升沉直线驱动器滑轮组804、吊臂中部滑轮组805、吊臂尾部滑轮组801、塔身滑轮组802以及摇摆后立板滑轮组803中均包含多个滑轮,且升沉直线驱动器滑轮组804、吊臂中部滑轮组805、吊臂尾部滑轮组801、塔身滑轮组802以及摇摆后立板滑轮组803中滑轮数量分别为p个、p个、m个、2m-1个以及m个。其中本实施例中升沉直线驱动器滑轮组804、吊臂中部滑轮组805、吊臂尾部滑轮组801、塔身滑轮组802以及摇摆后立板滑轮组803中滑轮数量分别为三个、三个、三个、五个以及三个。
49.如图7所示,柔索7的第一端设于吊臂6的前端,且柔索7的第二端绕过吊臂前端滑轮601、升沉直线驱动器滑轮组804中的第一个滑轮、臂中部滑轮组805中的第一个滑轮后,继续依次缠绕于升沉直线驱动器滑轮组804中的第二个滑轮,直至缠绕于吊臂中部滑轮组805中的第三个滑轮后,继续依次缠绕于吊臂尾部滑轮组801中的第一个滑轮、塔身滑轮组802中的第一个滑轮以及摇摆后立板滑轮组803中的第一个滑轮后,继续依次缠绕于塔身滑轮组802中的第二个滑轮以及吊臂尾部滑轮组801中的第二个滑轮,直至缠绕于摇摆后立板滑轮组803中的第三个滑轮后,与吊重提升绞车9连接。
50.本发明实施例吊臂6上端的中间部设有吊臂中部滑轮组805,用于对柔索7起导向作用,将升沉直线驱动器504设置于臂6上,可以增大升沉直线驱动器504的移动行程,有利于进一步增大升沉补偿的距离。
51.实施例3
52.本发明的第三方面,提供一种负载自平衡摇摆补偿海上作业克令吊,如图8所示,其包括基座单元1、回转平台2、摇摆平台3、塔身4、吊臂6、柔索7、滑轮组8和吊重提升绞车9。
53.如图2、图8和图9所示,基座单元1与回转平台2之间通过转盘轴承102第一转动副1’连接,且回转驱动器驱动转盘轴承102带动回转平台2转动,摇摆平台3设于回转平台2上,摇摆平台3通过第二转动副2’与回转平台2转动连接。
54.如图8和图9所示,塔身4设于摇摆平台3上,且塔身4的下端通过第三转动副3’与摇摆平台3中摇摆底板301的中间部连接,塔身4的前侧设有塔身面内摇摆直线驱动器501,且塔身面内摇摆直线驱动器501的下端通过第四转动副4’与摇摆底板301的前端连接,塔身面内摇摆直线驱动器501的上端通过第五转动副5’与塔身4的中间部连接,且塔身4的一侧设有塔身面外摇摆直线驱动器502,塔身面外摇摆直线驱动器502的下端通过万向铰链与回转平台2连接,且塔身面外摇摆直线驱动器502的上端通过第八转动副8’与塔身4的中间部连接,塔身4的另一侧设有克令吊操作台10,吊臂6设于塔身4上,且吊臂6后端的底部通过第九转动副9’与塔身4的上端连接,吊臂6与塔身4之间设有吊臂面内俯仰直线驱动器503,且吊臂面内俯仰直线驱动器503的下端通过第十转动副10’与塔身4连接,吊臂面内俯仰直线驱动器503的上端通过第十一转动副11’与吊臂6连接,滑轮组8包括吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803和升沉直线驱动器滑轮组804,吊臂尾部滑轮组801通过第十二转动副12’与吊臂6的后端连接,且塔身滑轮组802通过第十三转动副13’与塔身4的
后侧连接,摇摆后立板滑轮组803通过第十四转动副14’与摇摆平台3中摇摆后立板302的上端连接,且摇摆后立板302上设有升沉直线驱动器504,升沉直线驱动器504的上端通过第十五转动副15’与升沉直线驱动器滑轮组804连接,且升沉直线驱动器滑轮组804两端的导向滑块与摇摆平台3中的直线导轨303滑动连接;吊重提升绞车9设于摇摆底板301上,柔索7的第一端与吊臂6的前端连接,且柔索7的第二端依次绕过吊臂6的吊钩、吊臂前端滑轮601、吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804与吊重提升绞车9连接。
55.本发明实施例相比于实施例1只在在塔身4的一侧设有塔身面外摇摆直线驱动器502,而塔身4的另一侧设有克令吊操作台10,可以用于人员操控克令吊工作。
56.实施例4
57.本发明的第四方面,提供一种负载自平衡摇摆补偿海上作业克令吊,如图9所示,其包括基座单元1、回转平台2、摇摆平台3、塔身4、吊臂6、柔索7、滑轮组8和吊重提升绞车9。
58.如图2、图10和图11所示,基座单元1与回转平台2之间通过转盘轴承102第一转动副1’连接,且回转驱动器驱动转盘轴承102带动回转平台2转动,摇摆平台3设于回转平台2上,摇摆平台3通过第二转动副2’与回转平台2转动连接。
59.如图10和图11所示,塔身4设于摇摆平台3上,且塔身4的下端通过第三转动副3’与摇摆平台3中摇摆底板301的中间部连接,塔身4的左右两侧对称设有塔身斜侧摇摆直线驱动器505,且塔身斜侧摇摆直线驱动器505的下端通过万向铰链与回转平台2连接,塔身斜侧摇摆直线驱动器505的上端与塔身4的中间部连接,吊臂6设于塔身4上,且吊臂6后端的底部通过第九转动副9’与塔身4的上端连接,吊臂6与塔身4之间设有吊臂面内俯仰直线驱动器503,且吊臂面内俯仰直线驱动器503的下端通过第十转动副10’与塔身4连接,吊臂面内俯仰直线驱动器503的上端通过第十一转动副11’与吊臂6连接,滑轮组8包括吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803和升沉直线驱动器滑轮组804,吊臂尾部滑轮组801通过第十二转动副12’与吊臂6的后端连接,且塔身滑轮组802通过第十三转动副13’与塔身4的后侧连接,摇摆后立板滑轮组803通过第十四转动副14’与摇摆平台3中摇摆后立板302的上端连接,且摇摆后立板302上设有升沉直线驱动器504,升沉直线驱动器504的上端通过第十五转动副15’与升沉直线驱动器滑轮组804连接,且升沉直线驱动器滑轮组804两端的导向滑块与摇摆平台3中的直线导轨303滑动连接;吊重提升绞车9设于摇摆底板301上,柔索7的第一端与吊臂6的前端连接,且柔索7的第二端依次绕过吊臂6的吊钩、吊臂前端滑轮601、吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804与吊重提升绞车9连接。
60.本发明实施例将实施例1中的塔身面内摇摆直线驱动器501和塔身面外摇摆直线驱动器502整体用塔身斜侧摇摆直线驱动器505替代,塔身斜侧摇摆直线驱动器505对称设于塔身4的左右两侧,有利于减少克令吊所用直线驱动器数量,便于控制。
61.实施例5
62.本发明的第五方面,提供一种负载自平衡摇摆补偿海上作业克令吊,如图12和图13所示,其包括基座单元1、回转平台2、摇摆平台3、塔身4、吊臂6、柔索7、滑轮组8和吊重提升绞车9。
63.如图2、图12和图13所示,基座单元1与回转平台2之间通过转盘轴承第一转动副连
接1’,且回转驱动器驱动转盘轴承带动回转平台2转动,摇摆平台3设于回转平台上2,且摇摆平台3通过第二转动副2’与回转平台2转动连接.
64.如图12和图13所示,塔身4设于摇摆平台3上,且塔身4的下端通过第三转动副3’与摇摆平台3中摇摆底板301的中间部连接,塔身4的四周均布有四个塔身斜侧摇摆直线驱动器505,且塔身斜侧摇摆直线驱动器505的下端通过万向铰链与回转平台3连接,塔身斜侧摇摆直线驱动器505的上端与塔身4的中间部连接,吊臂6设于塔身4上,且吊臂6后端的底部通过第九转动副9’与塔身4的上端连接,吊臂6与塔身4之间设有吊臂面内俯仰直线驱动器503,且吊臂面内俯仰直线驱动器503的下端通过第十转动副10’与塔身4连接,吊臂面内俯仰直线驱动器503的上端通过第十一转动副11’与吊臂6连接,滑轮组8包括吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803和升沉直线驱动器滑轮组804,吊臂尾部滑轮801组通过第十二转动副12’与吊臂6的后端连接,且塔身滑轮组通802过第十三转动副13’与塔身4的后侧连接,摇摆后立板滑轮组803通过第十四转动副14’与摇摆平台3中摇摆后立板302的上端连接,且摇摆后立板302上设有升沉直线驱动器504,升沉直线驱动器的504上端通过第十五转动副15’与升沉直线驱动器滑轮组804连接,且升沉直线驱动器滑轮组804两端的导向滑块与摇摆平台3中的直线导轨303滑动连接;吊重提升绞车9设于摇摆底板上,柔索7的第一端与吊臂6的前端连接,且柔索7的第二端依次绕过吊臂6的吊钩、吊臂头部滑轮601、吊臂尾部滑轮组801、塔身滑轮组802、摇摆后立板滑轮组803以及升沉直线驱动器滑轮组804与吊重提升绞车9连接。
65.在一种优选方式中,四个塔身斜侧摇摆直线驱动器505均为液压缸,且四个液压缸包括第一液压缸、第二液压缸、第三液压缸和第四液压缸,第一液压缸与第三液压缸相对应,且第一液压缸的上腔与第三液压缸的下腔相连通并通过油管与液压系统中第一伺服阀的a口相连通,第一液压缸的下腔与第三液压缸的上腔相连通并通过油管与液压系统中第一伺服阀的b口相连通,第二液压缸与第四液压缸位置相对应,且第二液压缸的上腔与第四液压缸的下腔相连通并通过油管与液压系统中第二伺服阀的a口相连通,二液压缸的下腔与第四液压缸的上腔相连通并通过油管与液压系统中第二伺服阀的b口相连通,通过控制第一伺服阀和第二伺服阀,能实现塔身的面内面外摇摆补偿。
66.以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:赵铁石 蔺艺辉 李二伟
- 技术所有人:燕山大学
- 我是此专利的发明人
- 上一篇:断路器的制作方法
- 上一篇:一种模拟眼部活动设备的制作方法
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、王老师:1.机器人 2.嵌入式控制系统开发
- 2、郝老师:1. 先进材料制备 2. 环境及能源材料的制备及表征 3. 功能涂层的设计及制备 4. 金属基复合材料制备
- 3、张老师:1.内燃机燃烧及能效管理技术 2.计算机数据采集与智能算法 3.助航设备开发
- 4、于老师:1.人工智能 2.红外图像处理及其应用。
- 5、李老师:1.船舶智能电网 2.机舱自动化
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....