一种航行体高速入水试验模型回收装置
1.本发明属于水下航行器回收技术领域,具体涉及一种航行体高速入水试验模型回收装置。
背景技术:
2.随着科技的不断发展,人们对于航行体入水的研究日益深入,并在不断地提高着航行体入水的速度。通常人们对于航行体入水的研究首先是理论分析,然后是数值模拟,最后利用试验进行相关理论计算或者是数值模拟结果的验证。
3.在高速入水试验中,通常赋予无动力无控模型一定的初始速度以及拟定初始入水角度,使其高速进入水中。而后,需要对其进行打捞,一方面是需要读取模型内部传感器的相关数据,另一方面是要对模型重复使用验证不同的工况。因此,打捞模型工作是航行体高速入水试验必不可少的环节。但是,在实际试验中,由于航行体是没有动力以及不受控制的,因此有时候一个小的扰动就会造成其弹道的不确定。高速入水试验所采用的水域具有面积广、深度大等特点,弹道的不确定性无疑给试验模型的打捞工作增加了一定的难度,现有措施一般将航行体模型设计为负浮力模型,依靠模型自身的浮力浮出水面,以便于试验人员寻找并打捞。
4.现有技术中记载有auv自主收放装置,该收放装置主要由导向罩、衔接管、机械手、总控台、安装架和弹性防撞板组成。其中,机械手、衔接管和导向罩组成auv回收管,总控台控制机械手的运动完成auv的回收与释放操作,弹性防撞板用于auv进入收放装置后的限位。现有的回收装置大体与之类似,采用笼式回收结构,基于视觉实现auv与回收装置的精准对接,但是现有的回收装置只适用于带有动力且能够在水下自主航行的航行体,对于无动力且无控的航行体试验模型并不适用。
5.针对于此,本发明提出了一种航行体高速入水试验模型回收装置,能够快速定位航行体高速入水以后在水中的位置,缩短打捞工作的时间,大大提高试验的效率。
技术实现要素:
6.要解决的技术问题:
7.为了避免现有技术的不足之处,本发明提供一种航行体高速入水试验模型回收装置,通过截面由大变小的水中导轨限制航行体模型入水后期弹道,增加航行体模型入水弹道的确定性,便于试验后期找寻模型。通过在缓冲收纳盒中铺设沙子、海绵垫等缓冲材料,对模型进行缓冲,保护模型不致直接撞击地面而损坏。通过采用凸耳利用地脚螺栓将缓冲收纳盒与地面固连,避免了航行体模型在缓冲收纳盒中撞击地脚螺栓。
8.本发明的技术方案是:一种航行体高速入水试验模型回收装置,包括导轨、导轨支架和缓冲收纳盒,所述导轨通过导轨支架安装于试验水池底部,所述缓存收纳盒固定于导轨的尾部;
9.所述航行体高速入水后穿过轨道进入缓冲收纳盒,经缓存后速度降至零并停留在
缓冲收纳盒中。
10.本发明的进一步技术方案是:所述导轨为中心轴为圆弧线的喇叭状结构,大径端朝向航行体入水方向,小径端与缓冲收纳盒对接。
11.本发明的进一步技术方案是:所述导轨的型面由两条引导线放样得到,两条引导线的公式如下:
12.y2(x)=e-0.65x
13.y3(x)=e-0.25x
14.其中,x表示航行体入水后所在竖直平面的x坐标。
15.本发明的进一步技术方案是:所述导轨支架包括多个沿导轨中心轴排布的支架,各支架的高度从导轨大径端到小径端逐渐减小;所述支架底部通过地脚螺栓和固定螺母安装于水池底部,顶部是与导轨下端外型面一致的圆弧结构。
16.本发明的进一步技术方案是:所述缓冲收纳盒通过地脚螺栓和固定螺母安装于水池底部。
17.本发明的进一步技术方案是:所述缓冲收纳盒为l型板,其长臂端水平设置于导轨的小径出口端延伸处,短臂端垂直位于长臂端的尾部;所述长臂端和短臂端外缘处均设置有垂直凸起,用于阻挡航行体滑出。
18.本发明的进一步技术方案是:所述缓冲收纳盒内铺设有缓存材料。
19.本发明的进一步技术方案是:所述缓存材料为海绵垫或沙子。
20.有益效果
21.本发明的有益效果在于:本发明通过截面由大变小的导轨,提高了对于航行体捕捉的准确性,避免了航行体在入水后期无法进入导轨;只对航行体模型入水后期弹道进行限制,不影响航行体入水前中期的弹道载荷特性及高速摄像机的拍摄结果;由于使用了地脚螺栓的螺纹自锁,本装置可承受航行体模型的撞击而不至于失效;在缓冲收纳盒中铺设海绵垫等缓冲材料,避免了模型的损坏;限制了航行体模型高速入水后的落点位置,加快了无动力无控试验模型的打捞进度,提高了试验的效率。
附图说明
22.图1是航行体入水轨迹、导轨两条导引线的函数曲线示意图;
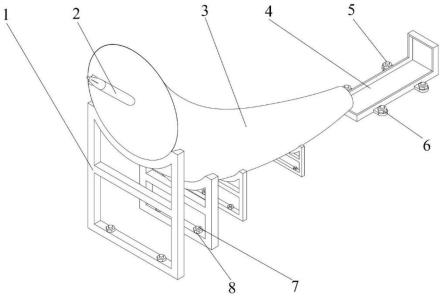
23.图2是整体结构示意图;
24.附图标记说明:1—导轨支架,2—航行体,3—导轨,4—缓冲收纳盒,5—缓冲收纳盒地脚螺栓,6—缓冲收纳盒固定螺母,7—导轨支架地脚螺栓,8—导轨支架固定螺母。
具体实施方式
25.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
26.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特
定的方位构造和操作,因此不能理解为对本发明的限制。
27.如图2所示,一种航行体高速入水试验模型回收装置,包括了导轨支架1、导轨3和缓冲收纳盒4。导轨支架1通过导轨支架地脚螺栓7和导轨支架固定螺母8与地面固连。导轨3通过焊接方式固连于导轨支架1。缓冲收纳盒4通过缓冲收纳盒地脚螺栓5和缓冲收纳盒固定螺母6与地面固连。
28.下面结合附图说明本发明的安装及使用过程。
29.首先将导轨支架地脚螺栓7按预定的导轨支架1间距及孔距埋在试验水池底部,放置导轨支架1并用导轨支架固定螺母8进行固定,然后将导轨3置于导轨支架1上进行焊接固连。根据缓冲收纳盒4的摆放位置在水池底部安装好缓冲收纳盒地脚螺栓5,将缓冲收纳盒放置好依照缓冲收纳盒地脚螺栓5位置放置好并用缓冲收纳盒固定螺母6固定好并在上面铺设打捞的网具、缓冲海绵垫及沙子等材料。此时,各部件之间的相对位置已经固定,可进行相关试验,能够对高速入水的试验模型进行快速定位打捞,并且各部分结构简单,易于维护及零部件之间的更换,大大地提高了航行体模型高速入水试验的效率,为航行体高速入水试验模型的打捞装置设计提供指导意义。
30.参照图1所示,以航行器入水角度45
°
为例,将航行器模型的空间运动简化为纵向运动,此时航行器模型的入水初期弹道可由函数表示,进一步选定y2(x)=e-0.65x
、y3(x)=e-0.25x
作为导轨放样时的两条上下引导线,确定出导轨的形状。当无动力无控的航行体模型被赋予一定的初速度高速进入水中,此时高速摄像机拍摄入水初期和中期弹道及空泡图像。在入水后期,航行体模型进入水中导轨,沿导轨运动,此时航行体依旧具有一定的速度,将会撞击铺设好海绵垫等缓冲材料的缓冲收纳盒。经过撞击,航行体模型速度降至零,并停留在缓冲收纳盒中,此时,试验模型打捞人员提起缓冲收纳盒中的网,试验模型便在网中。
31.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1