一种便携式河道清洁器及其控制系统的制作方法
一种便携式河道清洁器及其控制系统
【技术领域】
1.本发明涉及清洁器技术领域,特别涉及一种便携式河道清洁器、控制便携式河道清洁器工作运行的控制系统。
背景技术:
2.随着科技的发展,自动化机器的应运用越来越广泛了。河道垃圾的整治是不可忽视的,而紧挨着城市和乡村的河道尤为严重。
3.水面上的垃圾清理大部分都是靠人工清理,或者是借助机械设备。机械设备主要是运用船体,动力方面以柴油内燃机为主,该船体对于河面宽度较大清洁能力强,确实能达到较理想的结果。但对于小型水域的清洁却无济于事,因受船体较大的影响,难以转弯、行驶等,也有可能受河道深浅的限制,螺旋桨容易打在河床淤泥上,难以正常工作,更重要是柴油内燃机的噪声较大,排放的废气也容易污染环境。
技术实现要素:
4.针对背景技术中指出的问题,本发明提出一种便携式河道清洁器、控制便携式河道清洁器工作运行的控制系统。
5.一种便携式河道清洁器,包括清洁器本体,其特征在于,清洁器本体包括船体,船体后侧设置有垃圾存储仓,船体前侧设置为开口;船体内倾斜设置传送履带机构,传送履带机构的上端延伸至垃圾存储仓的上方,传送履带机构的下端延伸至开口的外部;船体的外部两侧分别设置左动力叶轮和右动力叶轮。
6.进一步地,船体包括船舱和船壳,船舱固定设置在船壳的右下角位置,船壳包括一体成型的后侧板、左侧板和右侧板,左侧板设置有左安装槽,左安装槽安装有第一安装侧板,右侧板设置有右安装槽,右安装槽安装有第二安装侧板,左侧板、第一安装侧板、后侧板、右侧板和第二安装侧板五者围成u型船壳,第一安装侧板和第二安装侧板均设置为半圆形板。
7.进一步地,船舱的舱壁内部和船壳的内部均填充有泡沫塑料。
8.进一步地,船舱内设置有主板控制器和电池,垃圾存储仓处于船舱的上方,垃圾存储仓由l型密封板和船壳围成,l型密封板固定设置在船舱的顶部,且l型密封板和船舱的顶部之间设置有密封圈,后侧板的板面设置为圆锥曲面或球体曲面。
9.进一步地,第一安装侧板设置有第一浮球报警结构,第二安装侧板设置有第二浮球报警结构,第一浮球报警结构和第二浮球报警结构两者的结构相同,第一浮球报警结构包括浮球、第一金属连杆、杠杆连接件、第二金属连杆、金属套管、触球和接触按钮;浮球处于第一安装侧板的外侧,浮球与第一金属连杆的一端固定连接,第一金属连杆设置为l型,第一金属连杆贯穿第一安装侧板,第一金属连杆的另一端与第二金属连杆铰接配合,第二金属连杆处于第一安装侧板的内侧,杠杆连接件的顶端固定设置在第一安装侧板的内侧,杠杆连接件与第一金属连杆的中部位置进行铰接配合,第二金属连杆与金属套管相套接,
金属套管固定设置在船舱上,第二金属连杆贯穿船舱并延伸至船舱内,且第二金属连杆的底端连接有触球,主板控制器上设置有接触按钮,接触按钮与触球相配合。
10.进一步地,左侧板和右侧板两者的前侧端部均设置有报警器。
11.进一步地,传送履带机构的倾斜角度设置为45
°
,传送履带机构包括主动轴、主动链轮、链条、从动轴和从动链轮,主动轴的两端通过轴承分别与第一安装侧板及第二安装侧板相配合,主动轴的一端固定连接驱动马达,主动轴的另一端固定连接减速马达,驱动马达固定设置在第一安装侧板的外侧,减速马达固定设置在第二安装侧板的外侧,从动轴的两端通过轴承分别与第一安装侧板及第二安装侧板相配合;传送履带机构两侧的链条之间固定连接多个连接细杆,连接细杆穿过链网,链网上设置有多个弹簧钢丝。
12.进一步地,第一安装侧板的外侧设置有左动力叶轮,第二安装侧板的外侧设置有右动力叶轮,左动力叶轮和右动力叶轮两者的结构相同,左动力叶轮包括浮轮和叶片,浮轮包括泡沫塑料内层和金属外壳,金属外壳的外周均匀分布设置多个叶片,浮轮固定连接传动轴,传动轴通过轴承与第一安装侧板相配合,传动轴通过齿轮传动的方式配合有滚珠电机。
13.一种基于上述的便携式河道清洁器的控制系统,其特征在于,包括船体控制模块、电池、滚珠电机、驱动马达、减速马达、无线通信模块、遥控器控制模块、遥控器电源、方向杆;遥控器控制模块处理方向杆的方向信号,发出指令并通过无线通信模块传输至船体控制模块,从而船体控制模块控制滚珠电机、驱动马达、减速马达的工作运行,当第一浮球报警结构和第二浮球报警结构中的触球均按压接触按钮时,使得主板控制器上的电路连通,报警器发出声光告警。
14.进一步地,无线通信模块设置为wifi模块。
15.综上所述,本发明的有益效果为:
16.1.整体产品体积小、生产成本低、操作灵活,有利于在狭窄的河道中清理河道垃圾;
17.2.通过设置了传送履带机构,可以清理水域中漂浮的易拉罐、玻璃瓶、树叶以及河面上的水草等垃圾,且可以有效减少垃圾的带水量,从而存储尽量多的垃圾,提高了工作效率;
18.3.设置了第一浮球报警结构和第二浮球报警结构,可以在清洁器承载了最大垃圾量时闭合主板控制器的回路,触发声光报警信号,最后可以及时返航。
【附图说明】
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
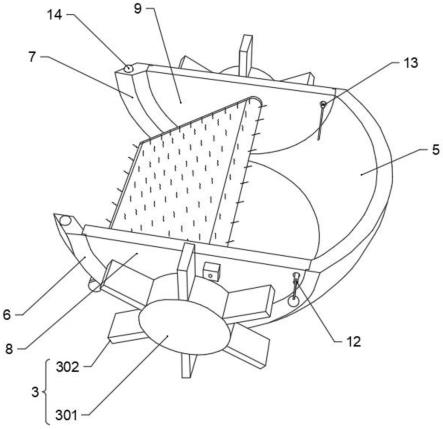
20.图1为本发明中清洁器的结构示意图;
21.图2为本发明中链条和链网相配合的结构示意图;
22.图3为本发明中传送履带机构进行工作的结构示意图;
23.图4为本发明中第一浮球报警结构的结构示意图;
24.图5为本发明中控制系统的原理示意图。
25.附图标记:1、垃圾存储仓;2、传送履带机构;201、链条;202、连接细杆;203、链网;204、弹簧钢丝;3、左动力叶轮;301、浮轮;302、叶片;4、船舱;5、后侧板;6、左侧板;7、右侧板;8、第一安装侧板;9、第二安装侧板;10、主板控制器;11、l型密封板;12、第一浮球报警结构;1201、浮球;1202、第一金属连杆;1203、杠杆连接件;1204、第二金属连杆;1205、金属套管;1206、触球;1207、接触按钮;13、第二浮球报警结构;14、报警器。
【具体实施方式】
26.请参阅图1至图5。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
27.一种便携式河道清洁器,如图1所示,包括清洁器本体,清洁器本体由船体、垃圾存储仓1、动力装置和垃圾收集装置等四部分组成。
28.对于船体来说,船体外部设计主要考虑对水中的阻力,根据《船舶阻力》学科的研究任务与研究方法,船体阻力按照船舶周围流动现象和产生的原因来分类,船体总阻力可分成:兴波阻力、摩擦阻力、粘压阻力。从各阻力成分及其占总阻力的比例与航速的关系来看。低速船:摩擦阻力70%~80%,粘压阻力10%以上,兴波阻力很小。高速船:兴波阻力40%~50%,摩擦阻力50%,粘压阻力5%。本实施例的河道清洁器属于低速船,主要考虑减小船体的摩擦阻力,首先从船体设计本身考虑,选择合理的船型参数,特别是主尺度的确定要恰当,其次,由于表面粗糙度对摩擦阻力的影响很大,因而在可能的范围内使船体表面尽可能光滑,另外边界层的控制以及船底充气都能有效的减小船体阻力。
29.船体包括船舱4和船壳,船舱4固定设置在船壳的右下角位置,船壳包括一体成型的后侧板5、左侧板6和右侧板7,左侧板6设置有左安装槽,左安装槽安装有第一安装侧板8,右侧板7设置有右安装槽,右安装槽安装有第二安装侧板9。左侧板6、第一安装侧板8、后侧板5、右侧板7和第二安装侧板9五者围成u型船壳。船体的外形长宽高尺寸为600毫米*350毫米*300毫米,这样可以最大范围存放其他相关设备和垃圾,船体的材料外壳选用表面光滑一体成型聚碳酸酯,厚度为1毫米。聚碳酸酯的材料特点是较软,有韧性,受水面上的冲击时有缓冲的余力,使船体更加坚固耐用,还可以有效避免像金属构件长时间暴露在中空气中产生氧化,从而造成不必要的船体渗水、定期保养等问题。
30.船舱4的舱壁内部和船壳的内部均填充有泡沫塑料,即在船体内部用10毫米的软质聚氯乙烯泡沫塑料进行填充,软质聚氯乙烯泡沫塑料是一种十分轻盈的材料,10毫米填充物泡沫重135克,浮力、不透水性等优良性能强大,能大大减轻船体的装备质量。
31.第一安装侧板8和第二安装侧板9均设置为半圆形板。另外,船壳的外侧面(即船壳与水之间的接触面)设置为平滑曲面,可以有效降低水阻力,在水中自由穿行。
32.船舱4内设置有主板控制器10和电池,其中将船舱4进行密封制作而成。电池选用
容量为10000mah可充电的锂离子电池,电池处于主板控制器10的最下层,即电池处于船体的最下层,因此,利用船舱4外壳的流动水体的散热作用,可以防止电池运行持久而过热膨胀。主板控制器10位于电池的上方,中间利用薄膜进行隔离,用于阻挡水气和灰尘。
33.对于垃圾存储仓1来说,在船体后侧设置有垃圾存储仓1,船体前侧设置为开口。垃圾存储仓1处于船舱4的上方,垃圾存储仓1由l型密封板11和船壳围成,l型密封板11固定设置在船舱4的顶部,且l型密封板11和船舱4的顶部之间设置有密封圈,再通过垫圈、弹簧垫片、螺栓进行锁紧,最后涂上密封胶,防止水渗入船舱4内。进一步地,后侧板5的板面设置为圆锥曲面或球体曲面。当收集的垃圾掉落至垃圾存储仓1内,首先会与后侧板5进行接触,因此,具有圆锥曲面或球体曲面的后侧板5可以有效地将垃圾滑落至垃圾存储仓1的底部,避免收集到一定量负载时,重心过高,造成船体摇晃加剧、甚至侧翻等现象的发生。
34.对于垃圾收集装置来说,河道上的垃圾在水上浮现的位置不同,如有浮在水面上的饮料瓶;有一半在水上一半在水下的枯枝落叶;有浮在水面下的马夹袋,对于这些复杂的垃圾清理,用u型开口作为垃圾收集装置的收集入口,则垃圾收集装置采用传送履带机构2进行实现。具体地,船体内倾斜设置传送履带机构2,传送履带机构2的上端延伸至垃圾存储仓1的上方,传送履带机构2的下端延伸至开口的外部。传送履带机构2的倾斜角度设置为45
°
,传送履带机构2包括主动轴、主动链轮、链条201、从动轴和从动链轮,主动轴的两端通过轴承分别与第一安装侧板8及第二安装侧板9相配合,主动轴的一端固定连接驱动马达,主动轴的另一端固定连接减速马达,驱动马达固定设置在第一安装侧板8的外侧,减速马达固定设置在第二安装侧板9的外侧,从动轴的两端通过轴承分别与第一安装侧板8及第二安装侧板9相配合。传送履带机构2两侧的链条201之间固定连接多个连接细杆202,连接细杆202穿过链网203,如图2所示。链网203上设置有多个弹簧钢丝204,弹簧钢丝204之间间隔50毫米。弹簧钢丝204直径为1毫米,长度为30毫米,并与链网203形成60度的夹角。弹簧钢丝204弹性变形吸收冲击能量,虽然可塑性差,但足以能承受小型垃圾、漂浮物的重量。因此,如图3所示,当船体慢慢靠近漂浮在水面上的易拉罐、玻璃瓶、塑料瓶等圆形物体,或水草、树叶、纸屑等,可以靠船体前端的u型开口,将垃圾聚集到传送履带机构2的收集入口处,通过传送履带机构2的不停转动下,将置于水面的垃圾顺着传输到传送履带机构2中的链网203上,不仅能有效对垃圾进行滤水,避免水进入垃圾存储仓1内,减少了垃圾的自重,还能减轻传送履带机构2自身的质量,从而减轻了清洁器的总质量,减少动力消耗,增加了垃圾清洁器的运行时间。
35.由于弹簧钢丝204随着传送履带机构2进行循环转动,因此,弹簧钢丝204与垃圾存储仓1中的l型密封板11要进行相应配合,即l型密封板11设置有凹槽供弹簧钢丝204穿过。进一步地,为了避免出现有些垃圾不能有效下落至垃圾存储仓1内或者有水草、马夹袋等垃圾缠绕弹簧钢丝204上,因此,l型密封板11顶部设置有锯齿口,通过锯齿口可以强制将垃圾挤入垃圾存储仓1内,对于水草则可以进行初步简单切割。
36.另外,在传送垃圾时,左侧板6、第一安装侧板8、右侧板7和第二安装侧板9对容易滚落的圆型物体进行有效隔档,防止传送履带机构2传送到一半时坠入河中,避免重复劳动。
37.对于动力装置来说,动力装置用于船体在河道上的前进、后退或转向。则动力装置采用叶轮。具体地,船体的外部两侧分别设置左动力叶轮3和右动力叶轮,左动力叶轮3和右
动力叶轮两者的结构相同且对称设置在船体的两侧。左动力叶轮3和右动力叶轮可以进行单独工作,当船体前进时,左动力叶轮3和右动力叶轮同时以相同功率进行正转运行,当船体后退时,左动力叶轮3和右动力叶轮同时以相同功率进行反转运行,当船体转向时,左动力叶轮3进行工作,右动力叶轮不进行工作(或者右动力叶轮进行工作,左动力叶轮3不进行工作)
38.具体地,第一安装侧板8的外侧设置有左动力叶轮3,第二安装侧板9的外侧设置有右动力叶轮,左动力叶轮3和右动力叶轮两者的结构相同,因此,本实施例仅描述左动力叶轮3的具体结构。左动力叶轮3的直径为150毫米,宽度为50毫米,左动力叶轮3包括浮轮301和叶片302,叶片302占据总半径的一半。浮轮301包括泡沫塑料内层和金属外壳,即浮轮301内部用20毫米软质聚氯乙烯泡沫塑料进行填充。
39.金属外壳的外周均匀分布设置六个叶片302。具体地,叶片302采用0.8毫米的铝合金,轻便耐用,有一定的硬度,每六个铝合金叶片302为一组,叶片302之间的夹角为60度,均匀分布在金属外壳的外侧。
40.浮轮301固定连接传动轴,传动轴通过轴承与第一安装侧板8相配合,传动轴通过齿轮传动的方式配合有滚珠电机。其中,滚珠电机的工作电压为12v,空载电流为1.1a,空载转速为12000转/分,最大扭矩6.5公斤/厘米。
41.进一步地,第一安装侧板8设置有第一浮球报警结构12,第二安装侧板9设置有第二浮球1201报警机构,第一浮球报警结构12和第二浮球1201报警机构两者的结构相同。在本实施例中仅描述第一浮球报警结构12的具体结构,如图4所示,第一浮球报警结构12包括浮球1201、第一金属连杆1202、杠杆连接件1203、第二金属连杆1204、金属套管1205、触球1206和接触按钮1207。
42.浮球1201处于第一安装侧板8的外侧,浮球1201与第一金属连杆1202的一端固定连接,第一金属连杆1202设置为l型,第一金属连杆1202贯穿第一安装侧板8,第一安装侧板8具有供第一金属连杆1202铰接摆动的间隙,第一金属连杆1202的另一端与第二金属连杆1204铰接配合,第二金属连杆1204处于第一安装侧板8的内侧,杠杆连接件1203的顶端固定设置在第一安装侧板8的内侧,杠杆连接件1203与第一金属连杆1202的中部位置进行铰接配合,第二金属连杆1204与金属套管1205相套接,金属套管1205固定设置在船舱4上,第二金属连杆1204贯穿船舱4并延伸至船舱4内,且第二金属连杆1204的底端连接有触球1206,主板控制器10上设置有接触按钮1207,接触按钮1207与触球1206相配合。
43.进一步地,左侧板6和右侧板7两者的前侧端部均设置有报警器14,报警器14与主板控制器10电性连接。
44.综上,当清洁器不断收集垃圾,清洁器的质量会不断增加,此时清洁器会逐渐向下沉入水中。当清洁器承载了最大重量的垃圾时,第一浮球报警结构12中的浮球1201受到浮力,使得触球1206向下挤压接触按钮1207。
45.由于存在着清洁器随着水域波浪左右摇晃的情况,当清洁器倾斜时,仅第一浮球报警结构12中的浮球1201受到浮力,而第二浮球1201报警机构中的浮球1201没有受到浮力,是不会停止清洁器的工作运行。
46.只有当清洁器承载了最大重量的垃圾时,第一浮球报警结构12中的浮球1201和第二浮球1201报警机构中的浮球1201均受到浮力,使得主板控制器10上的两个接触按钮1207
均按下进行接触,形成一个闭合的回路,报警器14发出声光报警,清洁器停止工作,并将相关信息传输至操作人员,最后进行返航。
47.在本实施例中,计算出清洁器可以承载的垃圾最大量:
48.圆球(浮球1201)体积公式:
49.4/3*3.14*2*2*2=33.49立方厘米
50.压入水中排出水33.49立方厘米即33.49毫升,水的密度标称为1克/毫升或1克/立方厘米,即排出33.49克水,浮力为排出水的重力。
51.并利用阿基米德浮力公式:
52.33.49*0.0098=0.3282n
53.即受0.3282n的浮力,如果不考虑球自身重量则需要33.49克重的物体可使他完全压入水中。两个浮球1201能多承载着67克的重物,相对于多承载三个易拉罐(25克*3)或一个可乐瓶(60克)的重量,对清洁器在水中左右摇摆的平衡有一定的作用。
54.可以得出垃圾存储仓1的体积:
55.30*35*10=10500立方厘米
56.压入水中排出水10500立方厘米即10500毫升,水的密度标称为1克/毫升或1克/立方厘米,即排出10500克水.浮力为排出水的重力。
57.并利用阿基米德浮力公式:
58.10500*0.0098=102.9n
59.即受102.9n的浮力,考虑清洁器自身重量为2042克。
60.则需要10290-2042=8248克重的物体可使他完全压入水中。
61.从上述计算中可以看出该河道垃圾清洁器的承载垃圾的最大重量为8248克将触发声光报警信号。
62.一种基于上述的便携式河道清洁器的控制系统,如图5所示,其包括船体控制模块、电池、滚珠电机、驱动马达、减速马达、无线通信模块、遥控器控制模块、遥控器电源、方向杆。滚珠电机用于控制左动力叶轮3或右动力叶轮的工作运行;驱动马达和减速马达用于控制传送履带机构2的工作运行。遥控器控制模块处理方向杆的方向信号,发出指令并通过无线通信模块传输至船体控制模块,从而船体控制模块控制滚珠电机、驱动马达、减速马达的工作运行,当第一浮球报警结构12和第二浮球1201报警机构中的触球1206均按压接触按钮1207时,使得主板控制器10上的电路连通,报警器14发出声光告警。其中,无线通信模块设置为wifi模块。
63.人工操作的遥控器选用较为普通的两根ps2方向杆控制面板,主要包含有电源开关控制器、摇杆无线通信发射接收通讯模块-a聚碳酸酯220模块,并对两根ps2方向杆自定在主板上相对应的引脚,对方向杆的功能进行有序的分类,在不同状态下一一对应字符常量,如:左右叶轮前进用字母w、i来表示,左右叶轮后退进用字母s、k来表示,向左转弯用字母a来表示,向右转弯用字母d来表示,传送履带机构2开始运行用字母r表示,紧急停止按钮用英文字母p表示。uno基于atmega 328p微控制器,并且还具有atmega16u微控制器。也是第一款arduino的绝佳选择,微控制器:atmega328p,工作电压:5v,输入电压(推荐):7-12v,输入电压(限制):6-20v,模拟输入引脚:6,每个i/o引脚的直流电流:40ma,3.3v引脚:50ma,闪存:32kb(atmega328),其中引导程序sram使用的0.5kb 2kb(atmega328),eeprom:1kb
(atmega328)时钟速度:16mhz。用xbee模块(微型蓝色模块,能够相互无线通信)与arduino通讯模块-a聚碳酸酯220usb(高度集成半双工微功率无线数据传输模块)之间无线数传,优点是小体积,宽电压运行,较远传输距离,丰富便捷的软件编程设置功能,其理论传输距离1000米。
64.以下将对本发明的工作过程作进一步的描述:
65.先检查清洁器和遥控器的线路连接是否正常;
66.打开清洁器和遥控器的电源,两者进行无线连接,连接后使用遥控器进行遥控控制清洁器的工作运行,确认是否能正常工作,若正常工作,将清洁器进行下水清洁工作;
67.初次下水时,操作者需要直观的判断清扫器在水域行驶中是否有偏离航道,一旦有偏离,及时调整左动力叶轮3和右动力叶轮之间的转动速度;
68.然后进行全力冲刺前进,如果偏离较为严重的,可以将清洁器靠上岸,进行人工调节叶轮之间叶片302的角度,叶片302接触水面角度不同直接影响清洁器在水域用推进的速度,叶轮与水面接触面积越大,在水中的阻力也越大,推动的速度慢,反之效果也就相反;
69.按上述方式调整清洁器,直至清洁器在下水进行工作时能够方向控制自如,最后,遥控清洁器至目标垃圾处,进行垃圾收集和清理。
70.以上所述的仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1