一种多功能水下探伤潜航器的制作方法
1.本发明涉及海洋水下探测技术领域,具体为一种多功能水下探伤潜航器。
背景技术:
2.随着远离海岸深水区域的油气资源开发,海洋平台结构所处作业环境越来越恶劣,强烈的海风和海浪的作用,以及凶猛海流的冲刷和冰山的撞击,加上海水腐蚀等,会使平台结构水下部分造成较快的损坏。如不能及时发现一些隐患,一旦出现平台结构在海上断裂,将会造成惨重的损失。
3.为了确保海洋平台结构、以及其它水下结构的可靠运行,除了需要严格把好建造的质量外,人们还日渐重视对现役平台结构的水下部分进行无损检验”。如1968年公布的abs规范中,对海洋平台结构的水下无损检验有明确要求,我国船舶检验局1983年公布的“海上固定平台八级与建造规范”中,对海洋结构的建造质量要求和国外相近,但对该结构的水下无损检验却没有明确要求。
4.中国专利zl 201610188617.x公开了一种水下面阵扫描激光成像装置及方法,其中公开了包括:运载器、电学模块和成像模块;运载器是整个装置的外壳,电学模块包括照明激光器、组合惯导和控制处理单元;电学模块的各部件固定在安装板两侧,通过安装板与运载器固定;成像模块包括纵摇伺服机构、横滚伺服机构和光学成像模组,光学成像模组包括成像镜头、滤光片、选通成像传感器和照明镜头;照明激光器发射的激光通过传能光纤传输至照明镜头,其装置具有小型化,能够在水下实现面阵扫描的特点。
5.中国专利zl 201910562471.4公开了一种水下用载物装置,其中公开了包括能够用于装载物品的载物器;还包括具有正浮力的浮力器,所述载物器和浮力器之间为固定连接或可脱离式连接;装载有物品的载物器为负浮力,该负浮力与所述浮力器的正浮力的大小相同或相近。其水下用载物装置能够扩大水下航行器携带任务载荷的能力,拓展其应用范围。
6.然而现有技术中的潜航器不能够挂载多种型号的探伤设备,同时由于潜航器外形的限定,对于探伤设备的形状和类型的约束较大,因此需要一种多功能的水下潜航器,能够挂载多种不同类型的探伤、探测装置,实现对各种的水下结构进行无损探伤。
技术实现要素:
7.针对现有技术的不足,本发明提供了一种多功能水下探伤潜航器,通过操作机构能够将多种类型的探伤装置从收起状态转变为工作状态,同时操作机构还能够在一定程度上对收起状态的探伤器装置进行防护,并且操作机构上能够根据使用的需要挂载不同结构、类型的探伤组件,以实现对桥墩、钻井平台等水下结构的无损探伤。
8.为实现上述目的,本发明提供如下技术方案:一种多功能水下探伤潜航器,包括潜航器本体、底部平台、压紧装置、提升前移架、顶部平台和探测组件,所述底部平台的底部设置有两个所述潜航器本体,所述潜航器本体
上设置有前进推进机构和转向推进机构,两个所述潜航器本体能够承载所述底部平台在水下进行移动;底部平台上设置有提升前移架,所述提升前移架的顶端设置有顶部平台,所述顶部平台上设置有探测组件,所述底部平台、提升前移架和顶部平台构成防护结构,在所述提升前移架处于收缩状态和伸展状态时,所述探测组件的主体部分均处于所述防护结构内部;所述提升前移架伸展后,能够使得所述顶部平台相对于所述底部平台向上且向前移动,以使所述探测组件能够处于潜航器本体的前部的有利于进行无损检测的位置;所述探测组件通过翻转驱动机构能够在所述顶部平台翻转,实现从水平状态到竖直状态的转换,通过所述翻转驱动机构和提升前移架共同作用,且使得所述探测组件的竖直状态的位置位于所述潜航器本体的前部的上方;在所述提升前移架处于收缩状态时,所述压紧装置能够压紧所述顶部平台,实现所述顶部平台的固定。
9.进一步的,所述提升前移架包括连杆组件、驱动电机、驱动丝杆、驱动螺母、支撑辊和联动轴,所述连杆组件为两组,分别设置于所述底部平台和顶部平台的两侧,两组所述连杆组件之间设置有支撑辊和联动轴;所述连杆组件包括第一长杆、第二长杆、第一短杆、第二短杆、第一斜撑杆和第二斜撑杆,所述第一长杆的下端铰接于所述底部平台的后端,所述第一斜撑杆的下端铰接于所述底部平台的前端,所述第二斜撑杆的上端铰接于所述顶部平台的后端,所述第二长杆的上端铰接于所述顶部平台的前端;所述第二长杆的下端同时铰接所述第一斜撑杆的上端和所述第一短杆的上端,所述第一长杆的上端同时铰接所述第二斜撑杆的下端和所述第二短杆的下端,所述第一短杆的下端铰接于所述第一长杆的中部,所述第二短杆的上端铰接于所述第二长杆的中部;所述第一长杆、第二斜撑杆和第二短杆 的铰接位置处设置有驱动电机,所述第二长杆、第一斜撑杆和第一短杆的铰接位置处设置有驱动螺母,所述驱动电机传动连接所述驱动丝杆,所述驱动丝杆与所述驱动螺母螺纹配合,通过驱动丝杆的转动改变所述驱动螺母和驱动电机之间的距离,以实现所述连杆组件的升降和前移;两组所述连杆组件之间,在所述驱动电机的对应位置处,连接设置有可转动的支撑辊;两组所述连杆组件之间,在所述驱动螺母的对应位置处,连接设置有联动轴。
10.进一步的,所述探测组件包括旋转基板、转轴、翻转电机、支撑板、平移板、折叠杆、折叠电机和折叠丝杠,所述顶部平台为u形结构,所述u形结构的开口朝向的一侧设置有翻转电机,所述转轴设置在所述旋转基板的一端,所述翻转电机与所述转轴传动连接,能够驱动所述旋转基板进行翻转;所述提升前移架处于收缩状态时,所述探测组件处于水平状态且容纳于u形结构的所述顶部平台的所述开口中;所述提升前移架伸展后,在所述支撑辊距离所述顶部平台一定距离后,所述翻转电机使得所述旋转基板从水平状态翻转至竖直状态。
11.进一步的,所述旋转基板上固定设置有支撑板和折叠电机,所述折叠电机的输出端与所述折叠丝杠连接,所述折叠丝杠与所述平移板螺纹配合,并且所述平移板与所述支
撑板平行设置,且所述平移板在所述折叠丝杠的驱动以导向结构的导向下,能够相对于所述支撑板进行往复平移;所述折叠杆包括折叠杆体、凸起销、铰接孔和无损探测器,所述凸起销设置于所述折叠杆体一端的最外侧,所述折叠杆体上位于所述凸起销的临接位置设置有铰接孔,所述折叠杆体的另一端设置有无损探测器;所述折叠杆体的一端设置于所述平移板与所述支撑板之间,所述支撑板通过铰接孔与所述折叠杆体可转动的连接,所述平移板上设置有长腰孔,所述平移板通过长腰孔与所述折叠杆体的所述凸起销配合;所述折叠杆体为多个且成对的设置于所述支撑板上,所述平移板上的长腰孔为多个,每个成对的所述折叠杆体的所述凸起销与同一个所述平移板的长腰孔配合;通过所述平移板与所述支撑板的相对位置的改变,并借助凸起销和铰接孔能够实现所述折叠杆体相对于所述支撑板的转动。
12.进一步的,所述压紧装置包括压紧驱动座、升降杆、升降块、第一驱动杆、第二驱动杆、撑杆、压紧臂和压紧块,所述压紧驱动座固定于所述底部平台上,所述压紧驱动座与所述升降杆驱动连接以实现所述升降杆的上下移动,所述升降杆的顶端设置有升降块,所述升降块的两端分别铰接有第一驱动杆的下端和所述第二驱动杆的下端,所述压紧臂的一端铰接在所述第一驱动杆的上端,所述压紧臂的另一端设置有压紧块,所述撑杆的下端铰接于所述压紧驱动座上,所述撑杆的上端铰接于所述压紧臂的中部,所述第二驱动杆的上端铰接于所述撑杆的中部。
13.进一步的,所述升降杆上下移动,通过连杆机构驱动所述压紧臂在升降的同时能够进行前后平移,在所述提升前移架处于收缩状态时,所述压紧臂能够带动所述压紧块向上且向前移动并抵接压紧所述顶部平台的上表面;所述升降杆向下移动时,所述压紧臂能够带动所述压紧块向后且向下移动,使得所述压紧块能够避让所述顶部平台在上升过程中的移动轨迹。
14.与现有技术相比,本发明提供了一种多功能水下探伤潜航器,具备以下有益效果:1.本发明的潜航器上设置有提升前移架,提升前移架上可挂载多功能的探测器组件,进行不同类型探测的作业,并且其所挂载的探测组件的主体结构设置于该提升前移架内部,因此无论是在提升前移架处于收缩或者伸展状态时,探测组件的主体结构均位于提升前移架的内部,可以降低在水下位置的环境中不明物体对探测组件碰撞、损坏的风险;2.本发明的提升前移架能够将顶部平台提升的同时向前移动,配合探测组件的翻转驱动机构,能够实现将探测组件从水平状态转换为竖直状态,同时使得大型探测组件保持竖直状态的位置位于潜航器本体的前方,该竖直状态为探测组件的工作位置,位于潜航器本体的前方,使得在对被探测体进行无损探伤时,不会发生潜航器与被探测体的碰撞,同时能够容易的缩短探测组件与被探测体之间的距离,提高探测精度;3.本发明的压紧装置的压紧臂能够实现对顶部平台的压紧和夹持,增加了潜航器整体的紧固性,同时压紧臂能够升降前移,配合顶部平台的升降前移的运动轨迹,使得在压紧装置处于收起状态时,压紧臂上的压紧块能够避开顶部平台的运动轨迹;4.本发明的探测组件的折叠杆具有收缩和伸展两种状态,在处于收缩状态时可较小占用体积,更加有利于将探测组件收纳于提升前移架的内部,在探测组件处于工作状态
时,其折叠杆展开,扩大了探测组件的检测面积,同时使得无损探测器的分布位置更加贴合被探测体的外形。
附图说明
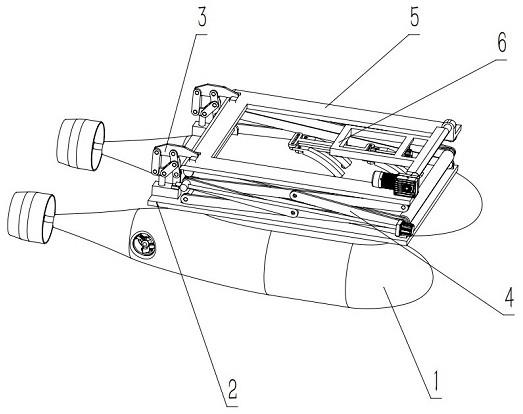
15.图1为本发明的多功能水下探伤潜航器的整体结构示意图;图2为本发明的探伤设备展开过程中的结构示意图;图3为本发明的探伤设备完全展开后的结构示意图;图4为本发明的探测组件翻转驱动结构的示意图;图5为本发明的探测组件的结构示意图;图6为本发明的探测组件的另一方向结构示意图;图7为本发明的折叠杆的结构示意图;图8为本发明的压紧装置的结构示意图;图9为本发明的潜航器进行无损探测的结构示意图;图中:潜航器本体1、底部平台2、压紧装置3、压紧驱动座31、升降杆32、升降块33、第一驱动杆34、第二驱动杆35、撑杆36、压紧臂37、压紧块38、提升前移架4、连杆组件41、第一长杆411、第二长杆412、第一短杆413、第二短杆414、第一斜撑杆416、第二斜撑杆415、驱动电机42、驱动丝杆43、驱动螺母44、支撑辊45、联动轴46、顶部平台5、探测组件6、旋转基板61、转轴62、翻转电机63、支撑板64、平移板65、折叠杆66、折叠杆体661、凸起销662、铰接孔663、无损探测器664、折叠电机67、折叠丝杠68、被探测体7。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.下面根据图1-图9对本发明进行详细的描述,本发明的一种多功能水下探伤潜航器,包括潜航器本体1、底部平台2、压紧装置3、提升前移架4、顶部平台5和探测组件6,所述底部平台2的底部设置有两个所述潜航器本体1,所述潜航器本体1上设置有前进推进机构和转向推进机构,两个所述潜航器本体1能够承载所述底部平台2在水下进行移动;底部平台2上设置有提升前移架4,所述提升前移架4的顶端设置有顶部平台5,所述顶部平台5上设置有探测组件6,所述底部平台2、提升前移架4和顶部平台5构成防护结构,在所述提升前移架4处于收缩状态和伸展状态时,所述探测组件6的主体部分均处于所述防护结构内部;所述提升前移架4伸展后,能够使得所述顶部平台5相对于所述底部平台2向上且向前移动,以使所述探测组件6能够处于潜航器本体1的前部的有利于进行无损检测的位置;所述探测组件6通过翻转驱动机构能够在所述顶部平台5翻转,实现从水平状态到竖直状态的转换,通过所述翻转驱动机构和提升前移架4共同作用,且使得所述探测组件6的竖直状态的位置位于所述潜航器本体1的前部的上方;;
在所述提升前移架4处于收缩状态时,所述压紧装置3能够压紧所述顶部平台5,实现所述顶部平台5的固定。
18.潜航器上设置有提升前移架,并且其所挂载的探测组件的主体结构设置于该提升前移架内部,因此无论是在提升前移架处于收缩或者伸展状态时,探测组件的主体结构均位于提升前移架的内部,可以降低在水下位置的环境中不明物体对探测组件碰撞、损坏的风险。进一步的,本发明的多功能水下探伤潜航器,其操作机构上能够根据使用的需要挂载不同结构、类型的探伤组件,以实现不同目的的水下作业,具体的可以在顶部平台5上安装大型探伤设备、小型折叠探伤设备、摄像头组件、声呐设备等等。
19.进一步的,所述提升前移架4包括连杆组件41、驱动电机42、驱动丝杆43、驱动螺母44、支撑辊45和联动轴46,所述连杆组件41为两组,分别设置于所述底部平台2和顶部平台5的两侧,两组所述连杆组件41之间设置有支撑辊45和联动轴46;所述连杆组件41包括第一长杆411、第二长杆412、第一短杆413、第二短杆414、第一斜撑杆416和第二斜撑杆415,所述第一长杆411的下端铰接于所述底部平台2的后端,所述第一斜撑杆416的下端铰接于所述底部平台2的前端,所述第二斜撑杆415的上端铰接于所述顶部平台5的后端,所述第二长杆412的上端铰接于所述顶部平台5的前端;所述第二长杆412的下端同时铰接所述第一斜撑杆416的上端和所述第一短杆413的上端,所述第一长杆411的上端同时铰接所述第二斜撑杆415的下端和所述第二短杆414的下端,所述第一短杆413的下端铰接于所述第一长杆411的中部,所述第二短杆414的上端铰接于所述第二长杆412的中部;所述第一长杆411、第二斜撑杆415和第二短杆414 的铰接位置处设置有驱动电机42,所述第二长杆412、第一斜撑杆416和第一短杆413的铰接位置处设置有驱动螺母44,所述驱动电机42传动连接所述驱动丝杆43,所述驱动丝杆43与所述驱动螺母44螺纹配合,通过驱动丝杆43的转动改变所述驱动螺母44和驱动电机42之间的距离,以实现所述连杆组件41的升降和前移;两组所述连杆组件41之间,在所述驱动电机42的对应位置处,连接设置有可转动的支撑辊45;两组所述连杆组件41之间,在所述驱动螺母44的对应位置处,连接设置有联动轴46。
20.进一步的,所述探测组件6包括旋转基板61、转轴62、翻转电机63、支撑板64、平移板65、折叠杆66、折叠电机67和折叠丝杠68,所述顶部平台5为u形结构,所述u形结构的开口朝向的一侧设置有翻转电机63,所述转轴62设置在所述旋转基板61的一端,所述翻转电机63与所述转轴62传动连接,能够驱动所述旋转基板61进行翻转;所述提升前移架4处于收缩状态时,所述探测组件6处于水平状态且容纳于u形结构的所述顶部平台5的所述开口中;所述提升前移架4伸展后,在所述支撑辊45距离所述顶部平台5一定距离后,所述翻转电机63使得所述旋转基板61从水平状态翻转至竖直状态。
21.提升前移架能够将顶部平台提升的同时向前移动,配合探测组件的翻转驱动机构,能够实现将探测组件从水平状态转换为竖直状态,同时使得大型探测组件保持竖直状态的位置位于潜航器本体的前方,该竖直状态为探测组件的工作位置,位于潜航器本体的前方,使得在对被探测体7进行无损探伤时,不会发生潜航器与被探测体7的碰撞,同时能够
容易的缩短探测组件与被探测体7之间的距离,提高探测精度,进一步的,被探测体7可以为水下的桥墩、钻井平台立柱等结构。
22.进一步的,所述旋转基板61上固定设置有支撑板64和折叠电机67,所述折叠电机67的输出端与所述折叠丝杠68连接,所述折叠丝杠68与所述平移板65螺纹配合,并且所述平移板65与所述支撑板64平行设置,且所述平移板65在所述折叠丝杠68的驱动以导向结构的导向下,能够相对于所述支撑板64进行往复平移;所述折叠杆66包括折叠杆体661、凸起销662、铰接孔663和无损探测器664,所述凸起销662设置于所述折叠杆体661一端的最外侧,所述折叠杆体661上位于所述凸起销662的临接位置设置有铰接孔663,所述折叠杆体661的另一端设置有无损探测器664;所述折叠杆体661的一端设置于所述平移板65与所述支撑板64之间,所述支撑板64通过铰接孔663与所述折叠杆体661可转动的连接,所述平移板65上设置有长腰孔,所述平移板65通过长腰孔与所述折叠杆体661的所述凸起销662配合;所述折叠杆体661为多个且成对的设置于所述支撑板64上,所述平移板65上的长腰孔为多个,每个成对的所述折叠杆体661的所述凸起销662与同一个所述平移板65的长腰孔配合;通过所述平移板65与所述支撑板64的相对位置的改变,并借助凸起销662和铰接孔663能够实现所述折叠杆体661相对于所述支撑板64的转动。
23.探测组件的折叠杆具有收缩和伸展两种状态,在处于收缩状态时可较小占用体积,更加有利于使得探测组件容纳于提升前移架的内部,在探测组件处于工作状态时,其折叠杆展开,扩大了探测组件的检测面积,同时使得无损探测器的分布位置更加贴合被探测体的外形。
24.进一步的,所述压紧装置3包括压紧驱动座31、升降杆32、升降块33、第一驱动杆34、第二驱动杆35、撑杆36、压紧臂37和压紧块38,所述压紧驱动座31固定于所述底部平台2上,所述压紧驱动座31与所述升降杆32驱动连接以实现所述升降杆32的上下移动,所述升降杆32的顶端设置有升降块33,所述升降块33的两端分别铰接有第一驱动杆34的下端和所述第二驱动杆35的下端,所述压紧臂37的一端铰接在所述第一驱动杆34的上端,所述压紧臂37的另一端设置有压紧块38,所述撑杆36的下端铰接于所述压紧驱动座31上,所述撑杆36的上端铰接于所述压紧臂37的中部,所述第二驱动杆35的上端铰接于所述撑杆36的中部。
25.进一步的,所述升降杆32上下移动,通过连杆机构驱动所述压紧臂37在升降的同时能够进行前后平移,在所述提升前移架4处于收缩状态时,所述压紧臂37能够带动所述压紧块38向上且向前移动并抵接压紧所述顶部平台5的上表面;所述升降杆32向下移动时,所述压紧臂37能够带动所述压紧块38向后且向下移动,使得所述压紧块38能够避让所述顶部平台5在上升过程中的移动轨迹。
26.压紧装置的压紧臂能够实现对顶部平台的压紧和夹持,增加了潜航器整体的紧固性,同时压紧臂能够升降前移,配合顶部平台的升降前移的运动轨迹,使得在压紧装置处于收起状态时,压紧臂上的压紧块能够避开顶部平台的运动轨迹。
27.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1