一种用于水产养殖的水下滑翔机
1.本发明涉及水下滑翔机技术领域,具体涉及一种用于水产养殖的水下滑翔机。
背景技术:
2.水下滑翔机是一种新型的水下机器人,其利用净浮力和姿态角调整获得推进力,能源消耗极小,只在调整净浮力和姿态角时消耗少量能源,并且具有效率高、续航长的特点。
3.水产养殖行业中,水产品质量及安全问题与水质状况密切相关,尤其需要对水质中类如ph值、溶解氧、盐度、温度等要进行周期性定时监测,掌握水质现状及其变化趋势。
4.水下滑翔机具有制造成本和维护费用低、可重复使用、并可大量投放等特点,满足了长时间、大范围水下探索的需要,其可以搭载各种水质探测器,用于水产养殖的水质监测,具体可参照中国实用新型专利cn210063332u所公开的一种近海养殖区环境监测水下滑翔机。
5.然而,在对水质进行监测的过程中,需要在不同的时间、不同的位置留取水质的样品,由于技术的限制,现有的水下滑翔机无法进行水质采样,因而其无法满足水产养殖水质监测中的水质采样要求。
技术实现要素:
6.针对现有技术中的缺陷,本发明提供一种用于水产养殖的水下滑翔机,以满足水产养殖水质监测中的水质采样要求。
7.本发明提供了一种用于水产养殖的水下滑翔机,包括机身,所述机身的内部具有头部舱室、中部舱室和尾部舱室,所述头部舱室内设有浮力调节机构,所述中部舱室内设有配重件和驱动机构,所述驱动机构能够驱动配重件左右摆动以调节机身的左右重心,还能够驱动配重件前后移动以调节机身的前后重心;
8.所述配重件包括安装支架、电池和采样筒,所述安装支架上设有电池安装槽和采样筒安装槽,所述电池安装槽安装于所述电池安装槽内,多个所述采样筒安装于所述采样筒安装槽内,所述采样筒内适配有一活塞,采样筒的两端分别设有进水管和排水管,所述进水管上设有第一控制阀,所述排水管上设有第二控制阀,各所述采样筒的进水管分别通过采样水泵与设于机身外的一采样口相连,各所述采样筒的排水管分别与设于机身外的第一排水口相连。
9.进一步地,所述采样筒的两端分别通过进水管和排水管支撑于所述采样筒安装槽的两端,采样筒安装槽的两端分别设置有进水腔和排水腔,各所述采样筒的进水管与所述进水腔连通,各所述采样筒的排水管分别与所述排水腔连通,所述采样水泵的输入端通过软管与所述采样口连通,采样水泵的输出端通过软管与所述进水腔连通,所述第一排水口通过软管与所述排水腔连通。
10.进一步地,所述机身的底部设有第二排水口,所述进水腔的底部与所述第二排水
口之间通过软管连通,进水腔和第二排水口之间的软管上设有第三控制阀。
11.进一步地,所述中部舱室内前后相对设置有支撑架,两个所述支撑架之间转动安装有转动架,所述转动架的上部设有吊滑轨,所述安装支架滑动安装于所述吊滑轨下;
12.所述驱动机构包括平移机构和转动机构,所述平移机构用于驱动所述安装支架沿所述吊滑轨前后滑动,所述转动机构用于驱动所述转动架转动。
13.进一步地,所述平移机构包括转动安装于所述转动架上的丝杆、以及安装在所述转动架上并与所述丝杆传动连接的第一电机,所述安装支架上设有螺纹套接于所述丝杆上的丝杆套。
14.进一步地,所述转动机构包括同轴安装于所述转动架一端的大齿轮、安装于所述支撑架上并与所述大齿轮啮合的小齿轮、安装于所述支撑架上并与所述小齿轮传动连接的第二电机。
15.进一步地,所述浮力调节机构包括第一管道、第二管道、第三管道、第四管道、水囊和浮力调节水泵;
16.所述第一管道和第二管道的一端汇合并延伸至机身的外部,所述第一管道和第二管道的一端汇合并与所述水囊连接,所述第一管道和第三管道的另一端汇合并与所述浮力调节水泵的输入端相连,所述第二管道和第四管道的另一端汇合并与所述浮力调节水泵的输出端相连,所述第一管道上设有第四控制阀,第二管道上设有第五控制阀,第三管道上设有第六控制阀,第四管道上设有第七控制阀。
17.进一步地,所述机身的尾部设有螺旋桨,所述尾部舱室内设有用于驱动所述螺旋桨转动的第三电机。
18.进一步地,所述机身的外部搭载有温度、盐度、ph值、叶绿素、氧溶解度、氨氮、硫化物、亚硝酸盐传感器水文生态探头中的一种或多种。
19.进一步地,所述机身的头部安装有水下摄像头。
20.本发明的有益效果体现在:
21.本技术采用安装支架搭载电池和装满水的采样筒作为配重件,通过驱动机构驱动配重件前后移动和左右摆动来调节机身的前后和左右重心,进而调节机身的姿态角,多个采样筒可在不同的时间和位置分次进行水质采样,取样时,启动采样水泵,并将一采样筒两端的第一控制阀和第二控制阀打开,外部的水样从采样口吸入,并通过采样水泵压入该采样筒的进水管端,进入采样筒的水样通过活塞将采样筒内原先的水从排水管压出,并通过第一排水口排向外部,从而完成水质采样,采样后的配重也基本不会发生变化,不会影响机身姿态角的调整。
附图说明
22.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
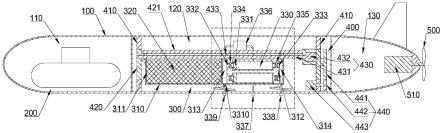
23.图1为本发明实施例的俯视图;
24.图2为本发明实施例的纵向剖视图;
25.图3为图2的局部放大图;
26.图4为本发明实施例的浮力调节机构的结构示意图。
27.附图中,100-机身;110-头部舱室;120-中部舱室;130-尾部舱室;200-浮力调节机构;210-第一管道;211-第四控制阀;220-第二管道;221-第五控制阀;230-第三管道;231-第六控制阀;240-第四管道;241-第七控制阀;250-水囊;260-浮力调节水泵;300-配重件;310-安装支架;311-电池安装槽;312-采样筒安装槽;313-进水腔;314-排水腔;320-电池;330-采样筒;331-活塞;332-进水管;333-排水管;334-第一控制阀;335-第二控制阀;336-采样水泵;337-采样口;338-第一排水口;339-第二排水口;3310-第三控制阀;400-驱动机构;410-支撑架;420-转动架;421-吊滑轨;430-平移机构;431-丝杆;432-第一电机;433-丝杆套;440-转动机构;441-大齿轮;442-小齿轮;443-第二电机;500-螺旋桨;510-第三电机;600-水下摄像头。
具体实施方式
28.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
29.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
30.如图1-图4所示,本发明实施例提供了一种用于水产养殖的水下滑翔机,包括机身100,机身100的内部具有头部舱室110、中部舱室120和尾部舱室130。
31.头部舱室110内设有浮力调节机构200。具体地,参照图4,浮力调节机构200包括第一管道210、第二管道220、第三管道230、第四管道240、水囊250和浮力调节水泵260;第一管道210和第二管道220的一端汇合并延伸至机身100的外部,第一管道210和第二管道220的一端汇合并与水囊250连接,第一管道210和第三管道230的另一端汇合并与浮力调节水泵260的输入端相连,第二管道220和第四管道240的另一端汇合并与浮力调节水泵260的输出端相连,第一管道210上设有第四控制阀211,第二管道220上设有第五控制阀221,第三管道230上设有第六控制阀231,第四管道240上设有第七控制阀241,第四控制阀211、第五控制阀221、第六控制阀231和第七控制阀241均可采用电磁阀。
32.本实施例可向水囊250注水或者将水囊250内的水排出来增减机身100头部的重量,实现净浮力的调整,净浮力为正(即浮力大于重力)时能够实现水下滑翔机上浮,净浮力为负(即重力大于浮力)时能够实现水下滑翔机的下潜。
33.向水囊250注水时,控制第四控制阀211和第七控制阀241打开,第五控制阀221和第六控制阀231关闭,启动浮力调节水泵260,机身100外部的水通过第一管道210吸入浮力调节水泵260,再通过第四管道240注入水囊250,将水囊250内的水排出时,控制第四控制阀211和第七控制阀241关闭,第五控制阀221和第六控制阀231打开,启动浮力调节水泵260,水囊250内的水通过第三管道230吸入浮力调节水泵260,再通过第二管道220排出机身100外部。
34.中部舱室120内设有配重件300和驱动机构400,驱动机构400能够驱动配重件300左右摆动以调节机身100的左右重心,还能够驱动配重件300前后移动以调节机身100的前后重心。
35.参照图2和图3,配重件300包括安装支架310、电池320和采样筒330,安装支架310上设有电池安装槽311和采样筒安装槽312,电池安装槽311安装于电池安装槽311内,多个采样筒330安装于采样筒安装槽312内,采样筒330内适配有一活塞331,采样筒330的两端分别设有进水管332和排水管333,进水管332上设有第一控制阀334,排水管333上设有第二控制阀335,第一控制阀334和第二控制阀335均可采用电磁阀,各采样筒330的进水管332分别通过采样水泵336与设于机身100外的一采样口337相连,各采样筒330的排水管333分别与设于机身100外的第一排水口338相连。
36.本技术采用安装支架310搭载电池320和装满水的采样筒330作为配重件300,通过驱动机构400驱动配重件300前后移动和左右摆动来调节机身100的前后和左右重心,进而调节机身100的姿态角,多个采样筒330可在不同的时间和位置分次进行水质采样,取样时,启动采样水泵336,并将一采样筒330两端的第一控制阀334和第二控制阀335打开,外部的水样从采样口337吸入,并通过采样水泵336压入该采样筒330的进水管332端,进入采样筒330的水样通过活塞331将采样筒330内原先的水从排水管333压出,并通过第一排水口338排向外部,从而完成水质采样,采样后的配重也基本不会发生变化,不会影响机身100姿态角的调整。
37.本实施例中,参照图3,采样筒330的两端分别通过进水管332和排水管333支撑于采样筒安装槽312的两端,采样筒安装槽312的两端分别设置有进水腔313和排水腔314,各采样筒330的进水管332与进水腔313连通,各采样筒330的排水管333分别与排水腔314连通,采样水泵336的输入端通过软管与采样口337连通,采样水泵336的输出端通过软管与进水腔313连通,第一排水口338通过软管与排水腔314连通。本技术通过在采样筒安装槽312两端设置进水腔313和排水腔314,进水腔313起到了汇聚各采样筒330进水管332的作用,排水腔314起到了汇聚各采样筒330排水管333的作用,这样不仅便于安装和排布采样筒330,减少了布管和管道接头,结构更加简单、紧凑。
38.优选地,机身100的底部设有第二排水口339,进水腔313的底部与第二排水口339之间通过软管连通,进水腔313和第二排水口339之间的软管上设有第三控制阀3310。
39.由于不同时间、不同地点采样的水质可能存在差异,采完一次水样后,进水腔313内会有一定的水样残留,下次采样时,可先控制第三控制阀3310打开,并启动采样水泵336将进水腔313内上次采样的水样残留排出,再控制第三控制阀3310关闭,采样筒330两端的第一控制阀334和第二控制阀335打开,进行采样筒330采样,这样能够避免上次采样在进水腔313中的水样残留对本次采样造成干扰,提高了采样的准确性。
40.并且,采样完成后,将各采样筒330内的水样依次排出时,可将第一排水口338与外部的水泵连接,水泵向第一排水口338反向注水,然后将控制一采样筒330两端的第一控制阀334和第二控制阀335打开、进水腔313和第二排水口339之间第三控制阀3310打开,从第一排水口338反向注入的水压入该采样筒330的排水管端,进入采样筒330的水再通过活塞331将采样筒330内的水样从进水管332压出,最后依次通过进水腔313和第二排水口339排出,从而流进接在第二排水口339下的收集容器内。
41.本实施例中,参照图2,中部舱室120内前后相对设置有支撑架410,两个支撑架410之间转动安装有转动架420,转动架420的上部设有吊滑轨421,安装支架310滑动安装于吊滑轨421下。
42.驱动机构400包括平移机构430和转动机构440。
43.平移机构430用于驱动安装支架310沿吊滑轨421前后滑动,具体地,平移机构430包括转动安装于转动架420上的丝杆431、以及安装在转动架420上并与丝杆431传动连接的第一电机432,安装支架310上设有螺纹套接于丝杆431上的丝杆套433,第一电机432通过丝杆431带动安装支架310前后移动,可以实现机身100前后重心的调节。
44.转动机构440用于驱动转动架420转动,具体地,转动机构440包括同轴安装于转动架420一端的大齿轮441、安装于支撑架410上并与大齿轮441啮合的小齿轮442、安装于支撑架410上并与小齿轮442传动连接的第二电机443,第二电机443通过齿轮带动转动架420转动,可以实现机身100左右重心的调节。
45.此外,机身100的尾部设有螺旋桨500,尾部舱室130内设有用于驱动螺旋桨500转动的第三电机510,该机器兼具水下滑翔机的运动特性,可以在水中按照滑翔机的运动特性滑翔,也可以在螺旋桨500的驱动下运行,大大减少能量的消耗。
46.机身100的外部搭载有温度、盐度、ph值、叶绿素、氧溶解度、氨氮、硫化物、亚硝酸盐传感器水文生态探头中的一种或多种,通过装配各种监测传感器,实现对水产养殖环境进行实时全水域监控,如温度、盐度、ph值、叶绿素、氧溶解度、氨氮、硫化物、亚硝酸盐等数据。
47.并且,机身100的头部安装有水下摄像头600,通过水下摄像头600对水质、鱼体量、鱼体积、鱼体表寄生虫等进行在线监测和控制,搭配无线传输系统实现数据的传送。
48.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1