深远海养殖工船的制作方法
1.本发明涉及海上养殖技术领域,特别涉及一种深远海养殖工船。
背景技术:
2.目前国内海上养殖逐步趋于更加专业化、智能化,渔业养殖与海洋工程逐步融合在一起。海洋工程技术促进了渔业养殖技术的发展。
3.随着海上渔业养殖技术的发展,市面上出现了多种养殖工船及养殖网箱。养殖装备大多注重了野生化自然环境养殖的特点。目前的养殖工船中,工船内带有多个养殖网箱。这类养殖工船有个最大的缺点,即水流下游的网箱养殖环境比较差,上游网箱内的食物残渣及鱼类粪便等垃圾会随海流流到后面的网箱内,越靠后的网箱养殖环境越差。特别对于双体船,网箱两侧的水流会被双体船体限制,水流仅能从船首尾向流动,网箱侧面不能进行海水交换,养殖环境会更差。虽然追求的是野生海水环境养殖,但普通的双体养殖工船会导致后面网箱的养殖环境更加恶劣,不利于鱼类生存。根据挪威havfarm养殖工船的实际养殖经验,havfarm养殖工船共6个养殖网箱,但后面3个养殖网箱的环境比较恶劣,鱼类死亡率较高。所以,对于养殖工船这类养殖装备,如何保证每个网箱内的养殖环境均等是目前存在的一个重大养殖问题。
技术实现要素:
4.本发明的目的在于提供一种保证养殖环境的深远海养殖工船,以解决现有技术中的问题。
5.为解决上述技术问题,本发明提供一种深远海养殖工船,包括:连接框架,其能够漂浮于海面,并能够通过调节压载水而调节吃水深度;所述连接框架为桁架结构而能够使海水穿过,且所述连接框架内设有养殖空间;两首部船体,平行间隔设置于所述连接框架的前端;两尾部船体,平行间隔设置于所述连接框架的尾端。
6.在其中一实施方式中,所述首部船体前后方向的尺寸大于左右方向的尺寸,且所述首部船体呈瘦长型;所述尾部船体前后方向的尺寸大于左右方向的尺寸,且所述尾部船体呈瘦长型。
7.在其中一实施方式中,所述连接框架包括上浮体、下浮体以及连接所述上浮体和所述下浮体之间的多个立柱;所述上浮体的底部的截面呈半圆形,且凸面朝向底部。
8.在其中一实施方式中,所述下浮体包括沿前后方向延伸的两下箱体以及沿左右方向延伸的多个下横梁,两所述下箱体平行间隔设置,多个所述下横梁平行间隔设置,各所述下横梁连接两所述下箱体,所述下横梁的截面呈圆形。
9.在其中一实施方式中,所述立柱的截面呈方形,且在四个角落处圆角过渡。
10.在其中一实施方式中,所述连接框架还包括设置于所述上浮体和所述下浮体之间
的多个斜撑;各所述斜撑的截面呈圆形。
11.在其中一实施方式中,所述养殖空间内设有养殖网,所述养殖网包括防护网和设置于所述防护网内的内网,所述防护网为龟甲网,所述内网的材质为超高分子量聚乙烯网衣。
12.在其中一实施方式中,所述首部船体的长度大于所述尾部船体的长度;所述首部船体上设置有机械区,所述尾部船体上设置有生活区。
13.在其中一实施方式中,所述连接框架的横向两侧均设有轨道,各所述轨道沿纵向延伸;所述深远海养殖工船包括设置于所述连接框架上的吊机,所述吊机能够沿所述轨道滑动。
14.在其中一实施方式中,所述深远海养殖工船包括动力定位系统和单点系泊系统;所述单点系泊系统包括设置于首部船体上的系泊设备、位于海床上的吸力锚,连接所述吸力锚和所述系泊设备的系泊缆绳;所述深远海养殖工船通过所述动力定位系统的驱动而转动至与海流的方向之间具有夹角,而使所述海水能经横向流向所述养殖空间。
15.在其中一实施方式中,所述深远海养殖工船与所述海流的方向之间的夹角为45
°
~90
°
。
16.在其中一实施方式中,所述深远海养殖工船还包括硬翼风帆以及设置于所述硬翼风帆上的太阳能板;所述硬翼风帆设置于所述连接框架上,并能够相对于所述连接框架转动至立起或放倒于所述连接框架上,在所述硬翼风帆放倒于所述连接框架上时,所述太阳能板位于所述硬翼风帆的顶部。
17.在其中一实施方式中,所述首部船体和所述尾部船体底部均设有全回转推进器。
18.由上述技术方案可知,本发明的优点和积极效果在于:本发明中的深远海养殖工船包括分列于前后两端的首部船体和尾部船体,以及位于中间的桁架式透水的连接框架,两首部船体和两尾部船体构成双体式船体,保证了深远海养殖工船具有良好的操纵性、快速性和运动性能,以及较好的航向稳定性。艏艉的双体船体分布于四个端部,跨距较大,使船体在水面的横向惯性矩大大增加,所以复原力矩也增大,稳性极好。双体船操纵起来很灵活,两个首部船体保证了它具有良好的航向稳定性,能在很小舵力下保持直线航行。
19.位于中间部分的连接框架为桁架式透水结构,其能够使海水横向流经养殖空间内的各处,保证养殖空间内各处都能进行充分的海水交换,避免了位于后方的空间受到位于前方的空间所产生的垃圾废物影响,使各处的养殖环境都接近野生的自然海洋环境。
附图说明
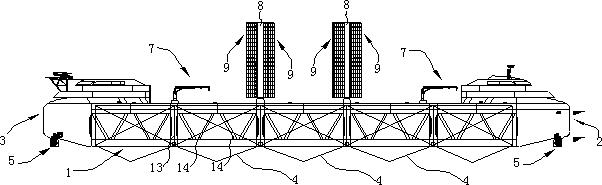
20.图1是本发明中深远海养殖工船其中一实施例的主视示意图。
21.图2是本发明中深远海养殖工船其中一实施例的俯视示意图。
22.图3是本发明中深远海养殖工船其中一实施例的侧视示意图。
23.图4是本发明中上浮体、首部船体以及尾部船体的俯视示意图。
24.图5是本发明中主甲板与上箱体的示意图。
25.图6是本发明中下浮体、首部船体以及尾部船体的俯视示意图。
26.图7是本发明中立柱、斜撑、首部船体、尾部船体以及养殖网的俯视示意图。
27.图8是本发明中深远海养殖工船通过单点系泊系统停于海域中的侧视示意图。
28.图9是本发明中深远海养殖工船通过单点系泊系统停于海域中的俯视示意图。
29.图10是本发明中硬翼风帆与太阳能板的示意图。
30.附图标记说明如下:1、连接框架;11、上浮体;111、上箱体;112、上横梁;113、第一水平斜撑;12、下浮体;121、下箱体;122、下横梁;123、第二水平斜撑;13、立柱;14、斜撑;15、主甲板;2、首部船体;3、尾部船体;4、养殖网;5、全回转推进器;61、系泊设备;62、系泊缆绳;63、吸力锚;7、吊机;8、硬翼风帆;9、太阳能板。
具体实施方式
31.体现本发明特征与优点的典型实施方式将在以下的说明中详细叙述。应理解的是本发明能够在不同的实施方式上具有各种的变化,其皆不脱离本发明的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本发明。
32.为了进一步说明本发明的原理和结构,现结合附图对本发明的优选实施例进行详细说明。
33.本发明提供一种深远海养殖工船,其可以保证每个位置的养殖环境均等,均接近自然海水环境,保证了养殖物的成活率。同时,该深远海养殖工船能够移动,进而能够躲避台风,避免受损,保证养殖效益。
34.图1示出了深远海养殖工船其中一实施例的主视示意图,图2示出了深远海养殖工船其中一实施例的俯视示意图,图3示出了深远海养殖工船其中一实施例的侧视示意图,结合图1-图3,该深远海养殖工船包括连接框架1、两首部船体2以及两尾部船体3。
35.为便于描述,定义深远海养殖工船的长度方向为纵向,宽度方向为横向,前进的方向为前端,反之为后端。
36.连接框架1能够漂浮于海面,并能够通过调节压载水而调节吃水深度。连接框架1为桁架结构而能够使海水穿过,且连接框架1内设有养殖空间。
37.具体地,连接框架1包括上浮体11、下浮体12以及连接上浮体11和下浮体12的多个立柱13。
38.图4为本实施例中上浮体11、首部船体2以及尾部船体3的俯视示意图,参阅图4,上浮体11包括上箱体111、上横梁112以及第一水平斜撑113。具体地,两上箱体111平行间隔设置,各上箱体111沿纵向延伸。上箱体111内具有压载舱而能够调节压载水。
39.多个上横梁112平行间隔设置。各上横梁112沿横向延伸,并位于两上箱体111之间。
40.第一水平斜撑113设置于各上横梁112与上箱体111之间。各上横梁112的横向两侧均设置有第一水平斜撑113。且各上横梁112横向两侧的第一水平斜撑113关于该上横梁112对称。
41.各上横梁112的纵向两端也均设置有第一水平斜撑113。即每个上横梁112处均对
应设置有四个第一水平斜撑113。
42.进一步地,上浮体11的底部的截面呈半圆形,且凸面朝向底部。采用上述结构,减小了波浪载荷的影响,避免上浮体11受到较大的波浪载荷而降低结构强度,保证了上浮体11的稳定性。
43.具体地,上箱体111的底部呈半圆形,上横梁112的底部的截面呈半圆形,第一水平斜撑113的底部的截面呈半圆形。
44.连接框架1还包括设置于上浮体11上的主甲板15。图5示出了主甲板与上箱体的示意图,参阅图5,主甲板15位于两上箱体111之间。
45.下浮体12设置于上浮体11的下方。图6示出了本实施例中下浮体12、首部船体2以及尾部船体3的俯视示意图,参阅图6,下浮体12具体包括沿前后方向延伸的两下箱体121以及沿左右方向延伸的多个下横梁122。两下箱体121平行间隔设置。下箱体121内具有压载舱而能够调节压载水。
46.多个下横梁122平行间隔设置。各下横梁122连接两下箱体121,下横梁122沿横向延伸。下横梁122的截面呈圆形,从而减小波浪载荷,减小航行阻力。
47.下浮体12还包括多个第二水平斜撑123。第二水平斜撑123设置于各下横梁122与下箱体121之间。各下横梁122的横向两侧均设置有第二水平斜撑123。且各下横梁122横向两侧的第二水平斜撑123关于该下横梁122对称。各下横梁122的纵向两端也均设置有第二水平斜撑123。即每个下横梁122处均对应设置有四个第二水平斜撑123。本实施例中,第二水平斜撑123与第一水平斜撑113一一对应设置。
48.图7示出了立柱13、斜撑14、首部船体2、尾部船体3以及养殖网4的俯视示意图,参阅图7,立柱13的截面呈方形,且在四个角落处圆角过渡。上述设计也是为了减小波浪载荷,从而减小航行阻力。
49.连接框架1还包括设置于上浮体11和下浮体12之间的多个斜撑14。各斜撑14的截面呈圆形,从而减小波浪载荷,减小航行阻力。
50.具体地,上箱体111以及其正下方的下箱体121之间具有沿纵向依次设置的多个斜撑14。上横梁112以及其正下方的下横梁122之间设置有沿横向依次设置的多个斜撑14。
51.本实施例中,立柱13的数量为八个,左右两侧各四个。上横梁112以及下横梁122的数量均为六个。其中一上横梁112以及一下横梁122分别位于首部船体2的上部和下部,另一上横梁112以及一下横梁122分别位于尾部船体3的上部和下部,剩余的四个上横梁112与四个立柱13一一对应,剩余的四个下横梁122也与四个立柱13一一对应。
52.因此,本实施例中的连接框架1的养殖空间包括五个独立的养殖区域。
53.养殖空间内设有养殖网4。各养殖区域内均设置有养殖网4。
54.具体地,养殖网4包括防护网和设置于防护网内的内网,防护网为龟甲网,内网的材质为超高分子量聚乙烯网衣。养殖物位于内网内,内网的网目为6cm。防护网用于防止漂浮物和鲨鱼等破坏内网。
55.上浮体11、下浮体12、立柱13以及多个斜撑14共同组成一个坚固的桁架式结构的连接框架1。该连接框架1能够透水,保证了养殖空间良好的透水性能,有利于海水交换。
56.连接框架1的结构使得其直接构成具有养殖空间的网箱,在养殖空间内设置双层的养殖网4即可实现养殖功能。同时,连接框架1的立柱13、上横梁112、下横梁122与养殖网4
配合而将养殖空间分割为5个独立的养殖区域。
57.两首部船体2平行间隔设置于连接框架1的前端。各首部船体2前后方向的尺寸大于左右方向的尺寸,且首部船体2呈瘦长型。本技术中,瘦长型指长宽比大于等于2,即首部船体2前后方向的尺寸与左右方向尺寸的比值大于等于2。
58.尾部船体3前后方向的尺寸大于左右方向的尺寸,且尾部船体3呈瘦长型。即尾部船体3前后方向的尺寸与左右方向尺寸的比值大于等于2。
59.首部船体2和尾部船体3内均设有压载舱,而能够通过调节压载水实现深远海养殖工船的上浮和下沉。
60.即该深远海养殖工船通过调节首部船体2、尾部船体3、上箱体111以及下箱体121的压载舱内的压载水,而调节船体的吃水大小,实现根据养殖量来调节养殖水体的大小。
61.两首部船体2、两尾部船体3以及连接框架1共同构成深远海养殖工船的船体。
62.整个船体通过瘦长型的首部船体2以及尾部船体3,显著降低了兴波阻力、减少了船波,使得本技术中的深远海养殖工船的航速快,机动性好。同时,瘦长型的结构使得船体具有小水线面,耐波性好。瘦长型的首部船体2也为海流提供了较大的流通面积,保证了养殖空间内海水的交换效率。
63.本技术中的深远海养殖工船包括两个首部船体2和两个尾部船体3,通过桁架式透水的连接框架1连接,将双体船和桁架式海上透水结构结合,使得该深远海养殖工船既具备双体船的性能特点又具备海上透水结构物的特点。
64.由于连接框架1为桁架式结构,因此,分布于四个角落的首部船体2以及尾部船体3提供了大部分的浮力以及水线面面积。该船体的吃水高度位于上浮体11和下浮体12之间的中间位置时,仅有首部船体2、尾部船体3、立柱13以及斜撑14形成的小水线面。这种小水线面面积设计特点使深远海养殖工船有一个良好的运动性能,船体摇晃较小,比较平稳。
65.独立的首部船体2以及尾部船体3,使得深远海养殖工船在水面的横向惯性矩大大增加,进而复原力矩也增大,稳性极好,稳性储备比相关技术中的单体船大2-4倍。
66.两个首部船体2保证了养殖工船具有良好的航向稳定性和操纵性。
67.首部船体2的顶部设置有机械区,内设主机室、配电室、电池间、集控室等机械舱室。由于首部船体2上设有机械区,导致首部的重量较大,因此,首部船体2沿纵向的尺寸大于尾部船体3沿纵向的尺寸,从而使首部船体2提供更多的浮力。
68.机械区设有自动投鱼收鱼设备间、投喂设备间、饲料储存间、死鱼回收设备间以及死鱼粉碎设备间等。
69.该深远海养殖工船包括两个生活楼,分别设置于前端和后端。设置于前端的首部生活楼模块主要是驾驶控制及船员工作生活区域,示例性的,如养殖监控监测室、驾驶室、远程控制室等。位于尾端的尾部生活楼主要是游客旅游娱乐区域,示例性的,如科普馆、海洋展览馆、海洋环保教育馆等海洋特色科技场馆。尾部生活楼顶部还设置有直升机甲板。
70.两个生活模块的设置保证船员区和游客区有效分割,保证游客安全。
71.继续参阅图1,深远海养殖工船包括四个全回转推进器5。其中,每个首部船体2底部均设有全回转推进器5,每个尾部船体3底部均设有全回转推进器5。全回转推进器5使深远海养殖工船具备航行能力,能够在台风时进行移位,躲避台风。全回转推进器5能使船舶360
°
旋转和横向移位,相比于直推式螺旋桨更加灵活。
72.即通过四个全回转推进器5,实现深远海养殖工船的航行和移位。
73.深远海养殖工船包括动力定位系统和单点系泊系统。
74.图8示出了深远海养殖工船通过单点系泊系统停于海域中的侧视示意图,图9示出了深远海养殖工船通过单点系泊系统停于海域中的俯视示意图,结合图8和图9,单点系泊系统包括系泊设备61、系泊缆绳62以及吸力锚63。系泊设备61设置于船体的端部。本实施例中,系泊设备61设置于首部船体2上。吸力锚63位于海床上,且在自身重力下部分下沉至泥面。
75.系泊缆绳62连接吸力锚63和系泊设备61而使深远海养殖工船停于海中。
76.吸力锚63预先安装于预定的养殖海域,然后再通过系泊缆绳62连接吸力锚63和位于船体上的系泊设备61。相较于多点系泊系统,单点系泊系统使深远海养殖工船受到的海洋环境载荷最小,有利于船舶安全和提高经济性。
77.动力定位系统用于驱动船体绕着吸力锚63转动,使深远海养殖工船的船体与海流之间形成一个角度α,进而使海水能经横向流向养殖空间,保证海水交换的质量。
78.进一步地,深远海养殖工船与海流的方向之间的夹角α为45
°
~90
°
。
79.在深远海养殖工船与海流方向之间的夹角α达到预设角度后,动力定位系统停止工作。但是,深远海养殖工船在风向标效应下会逐渐偏离预设角度。此时再次启动动力定位系统,驱动深远海养殖工船转动至预设角度。如此反复工作,保证了带有单点系泊系统的养殖工船使每个养殖区域都有理想的换水效率。
80.且在全回转推进器5的作用下,该深远海养殖工船可以围绕单点系统旋转,为海水流经网箱提供一个良好的角度,保证海水能从横向流进网箱内。
81.深远海养殖工船包括设置于连接框架1上的吊机7。具体地,连接框架1的横向两侧均设有轨道,各轨道沿纵向延伸。吊机7能够沿轨道滑动,从而使该吊机7能够在连接框架1的前端与尾端之间来回移动,即吊机7在首部船体2与尾部船体3之间移动。
82.本实施例中,吊机7的数量为两个,分列于连接框架1的横向两侧。即两吊机7与两轨道一一对应设置。
83.吊机7采用轨道移动的方式,保证了每个养殖区域都能够有吊机7服务,避免设置多台吊机7而增加重量以及增加成本,降低了整个深远海养殖工船的重量、降低了成本。
84.深远海养殖工船还包括硬翼风帆8以及设置于硬翼风帆8上的太阳能板9。硬翼风帆8为深远海养殖工船的航行提供辅助动力。太阳能板9用于提供绿色电能。
85.图10示出了硬翼风帆8与太阳能板9的示意图,结合图1、图2和图10,硬翼风帆8设置于连接框架1上,并能够相对于连接框架1转动至立起或放倒于连接框架1上。同时,硬翼风帆8还可以根据风向旋转。其中,图1中硬翼风帆8呈立起状态,图2中硬翼风帆8呈放倒状态。
86.本实施例中,硬翼风帆8的数量为两台。两硬翼风帆8沿纵向间隔设置,且各硬翼风帆8上均设置有太阳能板9。
87.其中,硬翼风帆8设置于连接框架1的中部区域。连接框架1的中部区域并不特指连接框架1沿长度方向上的正中心位置,而是指在包括连接框架1长度方向正中心位置在内的一定长度范围的区域,不包括连接框架1长度方向两端端部。本实施例中,硬翼风帆8设置于上横梁112上。
88.具体地,在硬翼风帆8放倒于连接框架1上时,太阳能板9位于硬翼风帆8的顶部。
89.太阳能板9按照硬翼风帆8表面的弧度安装。太阳能板9所产生的电能储存于电池间内的电池内,满足深远海养殖工船上除推进系统之外的用电需求。即回转推进器工作时,通过主发电机组供电。其余用电通过太阳能板9。
90.在进行养殖作业时,硬翼风帆8放倒,平放于连接框架1之上,从而减少船舶受力,并使太阳能板9能够得到更加好的光照。
91.进一步地,在硬翼风帆8平放时,旋转而使其相对于水平面倾斜,以利于太阳能板9得到良好的太阳光照。具体地,硬翼风帆8与水平面之间的夹角为25
°
。
92.当深远海养殖工船需要移位时,硬翼风帆8立起,为深远海养殖工船的航行提供辅助动力,从而减少柴油发电机燃油消耗。
93.上述深远海养殖工船同时还具有远程控制、智能航行、无人值守、自动投喂、死鱼回收等系统和功能。
94.本实施例中的深远海养殖工船包括分列于前后两端的首部船体2和尾部船体3,以及位于中间的桁架式透水的连接框架1,其具体具有以下优点:1、双体式船体保证了深远海养殖工船有良好的操纵性、快速性和运动性能,以及较好的航向稳定性。艏艉的双体船体分布于四个端部,跨距较大,使船体在水面的横向惯性矩大大增加,所以复原力矩也增大,稳性极好。将首部船体2以及尾部船体3设计为瘦长型,流线型船型,对降低兴波阻力和减少船波具有明显效果。双体船操纵起来很灵活,两个首部船体2保证了它具有良好的航向稳定性,能在很小舵力下保持直线航行。
95.位于中间部分的连接框架1为桁架式透水结构,其能够使海水横向流经每个养殖区域,保证每个养殖区域都能进行充分的海水交换,避免了位于后方的养殖区域受到位于前方的养殖区域所产生的垃圾废物影响,使每个养殖区域的养殖环境都接近野生的自然海洋环境。
96.2、在深远海养殖工船需要移位时,将硬翼风帆8竖起,而为航行提供辅助动力。
97.在硬翼风帆8上设置太阳能板9,解决了该深远海养殖工船主甲板15空间不足,无法使用太阳能发电的问题。硬翼风帆8平放或者竖立均能发电,且通过太阳能板9提供的电力能满足除推进器之外的日常需要。
98.3、回转推进器能使船体360
°
旋转和横向移位,不仅使船体能绕单点系泊系统旋转,进而能使海水横向流过养殖区域,保证了每个养殖区域的换水质量,还使船体具备躲避台风的能力。
99.4、吊机7沿轨道滑动而能够在连接框架1顶部移动,保证了吊机7能够服务于每个养殖区域,减少了吊机7数量,节省了建造成本。
100.5、采用单点系泊系统,降低了深远海养殖工船所受的海洋环境载荷,降低船体载荷有利于降低建造成本和保证安全运营。当海况相对较为恶劣时,可以停止回转推进器工作,使船体暂时在风向标效应下工作,提高船体抵抗风浪能力。
101.虽然已参照几个典型实施方式描述了本发明,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本发明能够以多种形式具体实施而不脱离发明的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随
附权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1