一种船用水下探测设备拖曳限位及辅助收放装置的制作方法
1.本发明涉及一种船用水下探测设备拖曳限位及辅助收放装置,属于船舶设计制造技术领域。
背景技术:
2.某型船用水下探测设备(如图1所示)拖曳时,由于水动力的作用,拖缆1在悬挂滑轮支承点处将向船尾倾斜,即存在拖曳倾角(如图2,3所示,在侧视图上的投影角为α,艏视图上的投影角为β),角度值与拖缆1拖曳长度、拖曳航速和拖曳海况有关,拖曳时拖缆1布放的长度越长、拖曳倾角越大;拖曳时航速越大,拖曳倾角越大;拖曳时海况越高,船舶摇摆幅度增加,拖曳倾角越大。由于拖曳时还需要考虑船舶转向机动,拖缆1在月池12内的运动包络范围是以悬挂支承点为顶点,底面半径为r1的圆锥体,在圆锥体范围内不应设置船体结构或其它设备,以避免拖缆1与其发生碰刮。为实现避碰,可通过增大月池12的净空间来保护拖缆1,但总体资源则难以满足这一需求。可通过增设拖曳限位装置实现避碰,拖曳限位装置需要解决的问题是通过在月池12内对拖缆1进行限位,即在悬挂滑轮支承点下方再增设一个支承点,在拖曳倾角不变的情况下,通过降低支承点来减少拖缆1在月池12内的运动范围。另外,对于悬挂滑轮,拖缆1绕进或绕出滑轮槽时偏斜的最大角度应不大于5
°
,当拖曳倾角β大于5
°
时,拖缆1可能从滑轮绳槽跳脱而损坏,这也要求增设横向支承装置对滑轮绳槽偏角进行限制。此外,回收探测设备时,由于船舶的运动,拖曳架2和探测单元4在水平面内存在前后、左右的摆荡运动以及沿垂直轴的偏转运动,见图4,这将导致拖曳架2和探测单元4进入月池12后,会与月池12四壁发生碰撞,使得探测设备无法收放。目前常规的解决方案是在收放存储舱及月池12内设置导向轨道,拖曳架2和探测单元4可沿轨道布放入水和回收入舱。轨道可在2级海况下,船舶锚泊或漂泊时,实现拖曳架2和探测单元4入轨回收。但现有的技术方案仅在收放存储舱内布设导向轨道,而在月池12内无法布置轨道;且在高海况和航行状态下(如在4级海况,最高航速4kn时)收放探测设备时,由于存在拖曳倾角及水下的探测单元会产生摆动,造成拖曳架2无法进入月池12及导向轨道。因此,本技术领域亟需解决拖曳时如何限位拖缆1的技术问题以及如何辅助拖曳架2、探测单元4入轨回收的技术问题。
技术实现要素:
3.本发明的目的是为解决拖曳时如何限位拖缆以及如何辅助拖曳架、探测单元入轨回收的技术问题。
4.为达到解决上述问题的目的,本发明所采取的技术方案是提供一种船用水下探测设备拖曳限位及辅助收放装置,装置设于月池四周,包括纵向限位机构、横向限位机构、纵向锁销机构、横向锁销机构、液压泵站、液压控制阀组和操作控制系统;所述月池前后壁上设有纵向限位机构,纵向限位机构上设有纵向锁销机构;所述月池左右壁上设有横向限位机构,横向限位机构上设有横向锁销机构;所述纵向限位机构、横向限位机构、纵向锁销机
构和横向锁销机构分别与液压控制阀组连接;液压控制阀组与液压泵站和操作控制系统连接;所述纵向限位机构与横向限位机构高低交错布置;所述纵向限位机构中包括拖曳探测设备时用于约束限位拖缆的前后对分式限位孔座;所述横向限位机构中包括收放探测设备时迫正拖曳架的推杆。
5.优选地,所述前后对分式限位孔座包括前限位孔座和后限位孔座;前限位孔座和后限位孔座之间设有用于限位拖缆的空间;前限位孔座和后限位孔座的内壁为球面,球面的半径大于等于拖缆直径的15倍,出绳角大于拖曳倾角α。
6.优选地,所述纵向限位机构设于横向限位机构的上方,通过拖曳倾角α和β确定限位孔座和推杆的高度。
7.优选地,所述纵向限位机构包括纵向固定箱、纵推箱体结构、滑块一和液压缸一;所述纵推箱体结构的一端设有限位孔座;另一端穿过纵向固定箱与液压缸一连接;纵推箱体结构与纵向固定箱之间设有滑块一。
8.优选地,所述纵向限位机构包括前后对称设有的前后纵向固定箱和前后纵推箱体结构;前后纵推箱体结构分别设有前限位孔座和后限位孔座。
9.优选地,所述横向限位机构包括横推箱体结构、推杆、滑块二、横向固定箱和液压缸二;所述横推箱体结构的一端设有推杆;另一端穿过横向固定箱与液压缸二连接;横推箱体结构与横向固定箱之间设有滑块二。
10.优选地,所述横向限位机构包括左右对称设有的左右横推箱体结构、左右推杆和左右横向固定箱;左右横推箱体结构分别设有左右推杆。
11.优选地,所述推杆包括左推杆和右推杆,推杆远离横向固定箱的端部沿船长方向的长度大于拖缆纵向运动的幅值,推杆外表面为圆弧面,圆弧面的弧面半径大于等于拖缆直径的15倍,出绳角大于拖曳倾角β。
12.优选地,所述纵向限位机构限位孔座存放工位的上方和下方设有用于拖曳架导向的过渡轨道;所述过渡轨道呈喇叭状,与限位孔座对接的一端口小,另一端口大。
13.优选地,所述操作控制系统包括操作台、手持式现场操作盒、发讯块和接近开关;所述发讯块设于纵向限位机构和横向限位机构上,接近开关和手持式现场操作盒与操作台连接。
14.优选地,所述前限位孔座、后限位孔座、左推杆和右推杆既可联合操控,又可单独按需操控,实现各自预定功能。
15.相比现有技术,本发明具有如下有益效果:
16.本发明通过设置两套独立的纵向限位孔座和横向限位推杆,独立或组合工作实现预定功能。
17.可用于约束限位拖缆,依次进行:1)横向推缆入位,推杆将拖缆横向运动幅度限制在限位孔座下口沿范围内;2)纵向推缆入位,限位孔座将拖缆推入闭合后限位孔座内;3)约束限位拖缆,限位孔座闭合后将拖缆运动限制在限位孔座内。
18.可用于辅助拖曳架入轨回收,依次进行:1)当拖曳架回收进入月池后,推杆横向迫正拖曳架,限制拖曳架的横向运动幅度;2)引导拖曳架进入限位孔座;在拖曳架上升过程中,前限位孔座伸出,对拖曳架首端进行限位,防止拖曳架横向从限位孔座跳脱;3)引导拖曳架越过限位孔座进入收放存储舱内的探测设备的导向轨道。
19.可防止悬挂链脱轨,布放或回收探测设备时,当探测单元进入月池后,前限位孔座伸出,防止悬挂链从限位孔座跳脱。悬挂链通过时和探测单元悬挂轴通过时前限位孔座伸出不同的距离防止悬挂链脱轨。
20.纵向限位孔座和横向限位推杆错层布置,合理确定限位孔座球面和推杆圆弧面高度,最大可能降低安装空间。
附图说明
21.图1为现有技术中探测设备示意图;
22.图2为探测设备悬挂支承侧视示意图;
23.图3为探测设备悬挂支承艏视示意图;
24.图4为拖曳架运动俯视示意图;
25.图5为本发明纵向限位机构结构示意图;
26.图6为本发明横向限位机构结构示意图;
27.图7为本发明纵向锁销机构结构示意图;
28.图8为本发明横向锁销机构结构示意图;
29.图9为本发明固定箱结构示意图;
30.图10为本发明液压控制阀组结构示意图;
31.图11为本发明操作台、手持式现场操作盒及接近开关等结构示意图;
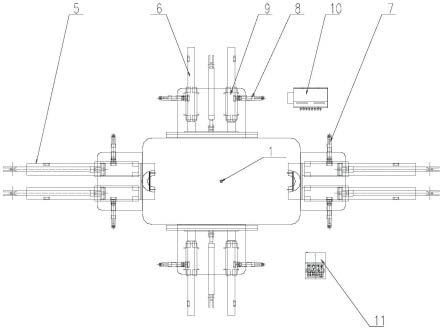
32.图12为本发明的整体结构图;
33.图13为本发明限位孔座结构图;
34.图14为本发明前限位孔座伸出防止悬挂链脱轨俯视示意图;
35.图15为本发明前限位孔座伸出防止悬挂链脱轨侧视示意图;
36.图16为本发明前限位孔座伸出防止悬挂轴脱轨俯视示意图;
37.图17为本发明前限位孔座伸出防止悬挂轴脱轨侧视示意图;
38.图18为本发明推杆横向推缆入位俯视示意图;
39.图19为本发明推杆横向推缆入位艏视示意图;
40.图20为本发明限位孔座纵向推缆入位俯视示意图;
41.图21为本发明限位孔座纵向推缆入位艏视示意图;
42.图22为本发明推杆迫正拖曳架俯视示意图;
43.图23为本发明推杆迫正拖曳架艏视示意图;
44.图24为本发明引导拖曳架入轨侧视示意图;
45.图25为本发明引导拖曳架入轨艏视示意图;
46.图26为本发明防止拖曳架脱轨俯视示意图;
47.图27为本发明防止拖曳架脱轨侧视示意图;
48.图28为本发明推杆结构示意图;
49.附图标记:1.拖缆;2.拖曳架;3.悬挂链;4.探测单元;5.纵向限位机构;51.后纵推箱体结构;52.后限位孔座;53.前限位孔座;54.滑块一;55.前纵推箱体结构;56.液压缸一;57.销轴一;6.横向限位机构;61.左横推箱体结构;62.左推杆;63.右推杆;64.滑块二;65.右横推箱体结构;66.液压缸二;67.销轴二;7.纵向锁销机构;71.锁销一;72.锁销座一;73.
液压缸三;74.销轴三;75.安装座一;76.销轴四;8.横向锁销机构;81.锁销二;82.锁销座二;83.液压缸四;84.销轴五;85.安装座二;86.销轴六;9.固定箱;91.纵向固定箱;92.横向固定箱;10.液压控制阀组;101.阀组底座;102.阀组接线箱;103.阀组;104.防护罩;105.压力表;11.操作台;112.手持式现场操作盒;113.接线箱;114.发讯块;115.分线箱;116.接近开关;12.月池;13.过渡轨道;
具体实施方式
50.为使本发明更明显易懂,兹以优选实施例,并配合附图作详细说明如下:
51.如图1-28所示,本发明所采取的技术方案是提供一种船用水下探测设备拖曳限位及辅助收放装置,设于月池12中,包括纵向限位机构5、横向限位机构6、纵向锁销机构7、横向锁销机构8、液压控制阀组10和操作控制系统;月池12前后壁上设有纵向限位机构5,纵向限位机构5上设有纵向锁销机构7;月池12左右壁上设有横向限位机构6,横向限位机构6上设有横向锁销机构8;纵向限位机构5、横向限位机构6、纵向锁销机构7和横向锁销机构8分别与液压控制阀组10连接;液压控制阀组10与液压泵站和操作控制系统连接;纵向限位机构5与横向限位机构6高低交错布置;纵向限位机构5中包括拖曳探测设备时用于约束限位拖缆1的前后对分式限位孔座;横向限位机构中包括收放探测设备时迫正拖曳架2的推杆。前后对分式限位孔座包括前限位孔座53和后限位孔座52;前限位孔座53和后限位孔座52之间设有用于限位拖缆1的空间;前限位孔座53和后限位孔座52的内壁为球面,球面的半径大于等于拖缆1直径的15倍。纵向限位机构5设于横向限位机构6的上方。纵向限位机构5包括纵推箱体结构、限位孔座、滑块一54和液压缸一56;纵推箱体结构的一端设有限位孔座;另一端穿过纵向固定箱91与液压缸一56连接;纵推箱体结构与纵向固定箱91之间设有滑块一54。横向限位机构6包括横推箱体结构、推杆、滑块二64和液压缸二66;横推箱体结构的一端设有推杆;另一端穿过横向固定箱92与液压缸二66连接;横推箱体结构与横向固定箱92之间设有滑块二64。推杆远离横向固定箱92的端部沿船长方向的长度l大于拖缆1纵向运动的幅值。纵向限位机构5限位孔座存放工位的上方和下方设有用于拖曳架2导向的过渡轨道13;过渡轨道13呈喇叭状,与限位孔座对接的一端口小,另一端口大。操作控制系统包括操作台11、手持式现场操作盒112、接线箱113、发讯块114、分线箱115和接近开关116;发讯块114与固定箱9连接,接近开关116和手持式现场操作盒112通过接线箱113和/或分线箱115与操作台111连接。
52.实施例
53.本发明提供一套装置,在拖曳探测设备时,能够支承拖缆1,承受拖缆1施加的拖曳载荷,并限制拖缆1的运动范围以保护拖缆1;在布放探测设备时,当探测单元4和拖曳架2进入月池12后,能够限制探测单元4和拖曳架2在月池12内的运动幅度并引导探测单元4和拖曳架2入水,避免探测单元4和拖曳架2与月池12碰撞;在回收探测设备时,能够限制探测单元4和拖曳架2在月池12内的运动幅度并引导探测单元4和拖曳架2进入收放存储舱内的导向轨道,避免探测单元4和拖曳架2与月池12碰撞。具体为:
54.(1)拖曳时约束限位拖缆1;
55.由于总体资源条件有限,月池12内或月池12四周除需要布置关闭设备及其他辅助设备外,还需为探测设备收放留出空间,因此,月池12内的支承点在满足约束限位拖缆1前
提下应尽可能压缩空间,降低高度,支承点采用对分式(哈夫结构)限位孔座,见图13。限位孔座内壁为球面,半径为15倍的拖缆1直径;高度为球面弧上的一段,即拖缆1从收放存储舱悬挂滑轮支承点至限位孔座圆弧面的切入点a到拖缆1从限位孔座下口沿切出点b的球面弧包覆段;上口半径为r,下口半径为r;出绳角应大于拖曳倾角α。拖曳时,当对分式限位孔座关闭后,拖缆1被限位孔座约束限位。
56.布放探测设备时,限位孔座需要开启,让出月池通道以便探测设备布放入水,探测设备布放完毕后,限位孔座关闭才能约束限位拖缆1。由于水动力的作用,拖缆1在月池12内呈前后、左右摆荡,在关闭限位孔座时,不能保证拖缆1位于月池12纵向中心线附近,能够被推入闭合后的限位孔座内。通过在限位孔座下方增设一对横向推杆,在纵向关闭限位孔座前,先行将拖缆1推至月池12纵向中心线附近,由推杆约束限制拖缆1横向运动幅度,再闭合限位孔座。推杆型式见图28。推杆闭合后与拖缆1接触面为圆弧面,半径为15倍的拖缆1直径;高度为圆弧面上的一段,即拖缆1从收放存储舱悬挂滑轮支承点至推杆圆弧面的切入点c到拖缆1从推杆下口沿切出点d的面弧包覆段;推杆闭合后间距为δ1,取值应小于限位孔座上口半径r的2倍;出绳角应大于拖曳倾角β;推杆长度l应大于拖缆1纵向运动幅值。
57.当探测设备布放完毕,推杆先伸出将拖缆1约束限位在纵向中心线附近(横向推缆入位),再伸出限位孔座将拖缆1推至闭合的限位孔座内(纵向推缆入位),探测设备转入拖曳状态。采用上述方式,拖曳限位及辅助收放装置占用月池12内的空间最小。
58.(2)收放时迫正拖曳架2;
59.a横向迫正拖曳架2:当拖曳架2进入推杆的作用范围后,推杆伸出横向迫正拖曳架2,限制拖曳架2的横向运动幅度;
60.b纵向引导拖曳架2:在纵向限位机构5限位孔座存放工位的上方和下方设置过渡轨道13,与收放存储舱内导向轨道对接,见图24。推杆横向迫正拖曳架2后,继续提升拖曳架2,拖曳架2横向运动被推杆限制,进入过渡轨道13,过渡轨道13呈“喇叭”状,与限位孔座对接的一端口小,另一端口大,拖曳架2被过渡轨道13约束,逐渐被引导进入收放存储舱内导向轨道,实现回收。本发明包括纵向限位机构5、横向限位机构6、纵向锁销机构7、横向锁销机构8、固定箱9、液压泵站、液压控制阀组10及电气控制系统,电气控制系统包括操作台11、手持式现场操作盒112、发讯器114、接线箱113、分线箱115及接近开关116等。纵向限位机构5、横向限位机构6、纵向锁销机构7、横向锁销机构8、固定箱9、发讯器114、接线箱113、分线箱115及接近开关116等安装在收放存储舱下的月池12四周,液压泵站、液压控制阀组10、操作台11、手持式现场操作盒112、接线箱113、分线箱115等安装在收放存储舱月池口附近。纵向限位机构5和横向限位机构6是主体机构,拖曳探测设备时,限位支承拖缆1,布放和回收探测设备时,限位引导拖曳架2和探测单元4,保障探测设备布放、拖曳和回收。
61.1、纵向限位机构5,包括后纵推箱体结构51、后限位孔座52、前限位孔座53、滑块一54、前纵推箱体结构55、液压缸一56和销轴一57;纵向限位机构共两组,布置于月池12前后部位纵推箱体结构为箱形结构,主体结构材料为高强度船体结构用钢。纵推箱体结构的箱体外侧壁四角焊装不锈钢板,纵向固定箱91内侧壁四角安装低摩擦系数滑块,不锈钢板与滑块组成滑动副,通过控制滑动副形状和位置公差,纵推箱体结构可沿纵向固定箱91灵活伸缩。限位孔座为对分式,闭合后的限位孔座上口为长孔,与拖缆1的接触面为圆弧面(最小半径满足15倍拖缆1直径的要求),圆弧面高度按其下端出缆处的出绳角确定,出绳角取值
应不小于设计拖曳倾角α。由于限位孔座与拖缆1直接接触,两者间存在摩擦运动,为降低拖缆1磨损,限位孔座采用tc4材料,表面精磨,即防海水腐蚀又降低了摩擦系数,限位孔座与纵推箱体结构采用销轴定位、螺栓连接。
62.每组纵向限位机构设置纵向启闭液压缸(液压缸一56)两只,液压缸一端铰接于纵推箱体结构内,另一端与船体支座铰接。
63.2、横向限位机构6,包括左横推箱体结构61、左推杆62、右推杆63、滑块二64、右横推箱体结构65、液压缸二66和销轴二67;横向限位机构6共两组,布置于月池12左右两侧。横推箱体结构为箱形结构,主体结构材料为高强度船体结构用钢。横推箱体结构的箱体外侧壁四角焊装不锈钢板,横向固定箱92内侧壁四角安装低摩擦系数滑块,不锈钢板与滑块组成滑动副,通过控制滑动副形状和位置公差,横推箱体结构可沿横向固定箱92灵活伸缩。
64.推杆为长杆,与拖缆1的接触面为的圆弧面(最小半径满足15倍拖缆1直径的要求),圆弧面高度按其下端出缆处的出绳角确定,出绳角取值应不小于设计拖曳倾角β。由于推杆与拖缆1直接接触,两者间存在摩擦运动,为降低拖缆1磨损,推杆采用tc4材料,表面精磨,即防海水腐蚀又降低了摩擦系数,推杆与横推箱体结构采用销轴定位、螺栓连接。
65.每组横向限位机构设置横向启闭液压缸一只(液压缸二66),液压缸一端铰接于推杆,另一端与船体支座铰接。
66.3、纵向锁销机构7,包括锁销一71、锁销座一72、液压缸三73、销轴三74、安装座一75和销轴四76;
67.纵向锁销机构7用于锁定紧固纵推箱体结构。纵向锁销机构分为前后两组。前后纵推箱体结构伸出至前后限位孔座闭合位置后,锁销伸出,将前后纵推箱体结构锁定,探测设备转入拖曳状态后,拖缆1作用在限位孔座上的载荷通过纵推箱体结构、锁销传递至固定箱及船体结构;探测设备作业完毕收回后,前后纵推箱体结构缩回至存放位置,锁销伸出,将前后纵推箱体结构锁定,保障航行时纵向限位机构安全存放。
68.锁销整体为圆柱形,头部设有锥面倒角,便于导向插入销孔内。纵向插销液压缸(油缸三73)内部设有机械式锁止机构,当液压缸缩回、锁销伸出到位后,液压缸自锁,确保锁销机械锁定。
69.4、横向锁销机构8,包括锁销二81、锁销座二82、液压缸四83、销轴五84、安装座二85和销轴六86;
70.横向锁销机构用于锁定紧固横推箱体结构。横向锁销机构分为左右两组。左右横推箱体结构伸出至左右推杆到达闭合位置后,锁定销伸出,将左右横推箱体结构锁定,拖缆1作用在限位孔座上的载荷通过横推箱体结构、锁销传递至固定箱及船体结构;探测设备作业完毕收回后,左右横推箱体结构缩回至存放位置,锁销伸出,将左右横推箱体结构锁定,保障航行时横向限位机构安全存放。
71.锁销整体为圆柱形,头部设有锥面倒角,便于导向插入至销孔内。横向插销液压缸(油缸四83)内部设有机械式锁止机构,当液压缸缩回、锁销伸出到位后,液压缸自锁,确保锁销机械锁定。
72.5、固定箱9包括纵向固定箱91和横向固定箱92;固定箱为箱型结构,作为船体结构的一部分,承受探测设备的载荷,并为纵推箱体结构和横推箱体结构伸缩导向。固定箱主体结构材料为高强度船体结构用钢。
73.6、液压泵站;液压泵站用于为纵向启闭液压缸、横向启闭液压缸、纵向插销液压缸及横向插销液压缸提供液压动力。液压泵站设置两套相同型号规格的液压泵-电动机组,两套泵组互为备用;另配置一台应急手动泵,当液压泵站失电或发生电气故障时,可使用手动泵及液压控制阀组的手操模式操纵纵向启闭液压缸、横向启闭液压缸、纵向插销液压缸及横向插销液压缸,实现应急操作拖曳限位装置。
74.7、液压控制阀组10包括阀组底座101、阀组接线箱102、阀组103、防护罩104和压力表105;
75.液压控制阀组10用于控制纵向启闭液压缸、横向启闭液压缸、纵向插销液压缸及横向插销液压缸的伸缩动作。液压控制阀组10设置叠加式液控单向阀、电磁换向阀、双单向节流阀等液压元件;配有压力继电器,当纵向启闭液压缸推动限位孔座闭合的压力超过额定压力10%时,能够卸荷并报警,从而保护探测设备。
76.8、操作台11;操作台11用于拖曳限位及辅助收放装置的操作控制,监控拖曳限位及辅助收放装置的工作状态,显示拖曳限位及辅助收放装置的工作信息。操作台11内部安装可编程控制器、继电器、断路器、开关电源;面板上装有二次仪表、按钮和指示灯等元件。可编程控制器是核心单元,通过软件编程实现整套装置的全部控制功能。
77.9、手持式现场操作盒112;手持式现场操作盒112用于辅助探测设备的布放和回收。手持式现场操作盒上设有“左伸出”、“右伸出”、“左缩回”、“右缩回”按钮,可控制左右舷推杆的伸出与缩回;“前伸出”、“前缩回”、“后伸出”、“后缩回”按钮,可控制前后限位孔座的伸出与缩回。操作者手持现场操作盒,站位于月池12开口旁,通过现场观测,按需按动按钮,辅助探测设备布放和回收。
78.10、接近开关116;纵向限位机构、横向限位机构、纵向锁销机构、横向锁销机构上装设接近开关116,通过安装在固定箱上的发讯块114触发接近开关116,可检测各液压缸伸缩动作是否到位,根据位置信号进行相关控制。
79.11、操作台11、手持式现场操作盒112、分线箱115、接线箱113及接近开关116之间通过电缆连接。
80.本发明的使用:
81.(1)探测设备布放时辅助探测设备布放操作:
82.在高海况、航行状态下布放探测设备时,当第一个探测单元4入水后,由于波浪作用,入水后的探测单元4在水平面内会出现前后、左右摆荡和沿垂直轴偏转,需要拖曳限位装置动作以防止悬挂链3脱轨。
83.1)拖曳限位装置切换为防止悬挂链3脱轨工况;
84.2)存放工位限位孔座解锁。图7纵向锁销机构7的液压缸三73伸出,带动由锁销座一72导向的锁销一71缩回(拔销),将图5纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55解锁,由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53同时解锁;
85.3)防止悬挂链3脱轨。图5纵向限位机构5的液压缸一56(前)伸出,带动由前纵推箱体结构55导向的前限位孔座53伸出,伸出量为
△
1,防止悬挂链3脱轨,见图14和图15;当探测单元4悬挂轴接近及通过后限位孔座52和前限位孔座53时,将前限位孔座53的伸出量调整至
△
2,见图16和图17,探测单元4悬挂轴通过后限位孔座52和前限位孔座53进入月池12
后,再将前限位孔座53伸出量调整回
△
1,反复操作,直至所有探测单元4布放完毕。
86.(2)探测设备拖曳时约束限位拖缆1的操作:
87.1)在探测设备布放至预定水深后,拖曳限位装置切换为约束限位拖缆1工况;
88.2)存放工位推杆解锁。图8横向锁销机构8的液压缸四83伸出,带动由锁销座二82导向的锁销二81缩回(拔销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65解锁,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时解锁;
89.3)推杆伸出至限缆工位。图6横向限位机构6的液压缸二66伸出,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63伸出至限缆工位(推杆间距为δ1),见图18和19,拖缆1被左推杆62、右推杆63推入靠近月池12纵向中心线附近位置,即横向推缆入位,拖缆1横向运动幅度被限制在左推杆62、右推杆63间距δ1内,纵向运动幅度被限制左推杆62、右推杆63长度l内;
90.4)限缆工位推杆锁定。图8横向锁销机构8的液压缸四83缩回,带动由锁销座二82导向的锁销二81伸出(插销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65锁定,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时锁定;
91.5)存放工位限位孔座解锁。图7纵向锁销机构7的液压缸三73伸出,带动由锁销座一72导向的锁销一71缩回,将图5纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55解锁,由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53同时解锁;
92.6)限位孔座伸出至限缆工位。图5纵向限位机构5的液压缸一56伸出,带动由纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53伸出直至闭合,见图20和21,将拖缆1推入闭合后的后限位孔座52和前限位孔座53内,即纵向推缆入位,拖缆1纵向运动幅度限制在限位孔座内;
93.7)限缆工位限位孔座锁定。图7纵向锁销机构7的液压缸三73缩回,带动由锁销座一72导向的锁销一71伸出(插销),将图5纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55锁定,由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53同时锁定;
94.8)限缆工位推杆解锁。图8横向锁销机构8的液压缸四83伸出,带动由锁销座二82导向的锁销二81缩回(拔销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65解锁,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时解锁;
95.9)推杆缩回至存放工位。图6横向限位机构6的液压缸二66缩回,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63缩回至存放工位;
96.10)存放工位推杆锁定。图8横向锁销机构8的液压缸四83缩回,带动由锁销座二82导向的锁销二81伸出(插销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65锁定,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时锁定;
97.11)完成限位拖缆1动作,探测设备转入拖曳状态。
98.(3)探测设备回收时辅助探测设备回收的操作:
99.1)存放工位推杆解锁。图8横向锁销机构8的液压缸四83伸出,带动由锁销座二82导向的锁销二81缩回(拔销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65解锁,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时解锁;
100.2)推杆伸出至限缆工位。图6横向限位机构6的液压缸二66伸出,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63伸出至限缆工位;
101.3)限缆工位推杆锁定。图8横向锁销机构8的液压缸四83缩回,带动由锁销座二82导向的锁销二81伸出(插销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65锁定,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时锁定;
102.4)限缆工位限位孔座解锁。图7纵向锁销机构7的液压缸三73伸出,带动由锁销座一72导向的锁销一71缩回(拔销),将图5纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55解锁,由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53同时解锁;
103.5)限位孔座缩回至存放工位。图5纵向限位机构5的液压缸一56缩回,带动由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53缩回至存放工位。在后限位孔座52和前限位孔座53脱开闭合至缩回存放工位过程中,拖缆1由后限位孔座52和前限位孔座53约束限位逐渐转为由左推杆62、右推杆63约束限位;
104.6)限缆工位推杆解锁。图8横向锁销机构8的液压缸四83伸出,带动由锁销座二82导向的锁销二81缩回(拔销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65解锁,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时解锁;
105.7)推杆缩回至存放工位。图6横向限位机构6的液压缸二66缩回,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63缩回至存放工位。
106.8)拖曳限位装置切换为辅助拖曳架2入轨回收和防止悬挂链3脱轨工况;
107.9)拖曳架2回收至迫正位置。回收探测设备至拖曳架2进入月池12,到达推杆“迫正”位置,见图23(拖曳架2底部距月池12底部距离h处),暂停回收拖缆1;
108.10)迫正拖曳架2。图6横向限位机构6的液压缸二66伸出,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63伸出,横向摆动的拖曳架2被推杆推向靠近月池12纵向中心线(即图5纵向限位机构5的后限位孔座52和前限位孔座53的纵向中心线)的“迫正”位置(推杆间距为δ2),其横向运动范围被限制在后限位孔座52和前限位孔座53下口沿开口范围内,见图22和23;
109.11)拖曳架2入轨。探测设备继续回收,在图6横向限位机构6的左推杆62、右推杆63的约束限位下,拖曳架2提升进入过渡轨道13(下),沿其“喇叭”状圆弧面上升,越过限位孔座和过渡轨道13(上)后,进入收放存储舱内探测设备的导向轨道,见图24和25;
110.12)防止拖曳架2脱轨。在拖曳架2进入过渡轨道13和限位孔座的上升过程中,液压缸一56(前)伸出,带动由前纵推箱体结构55导向的前限位孔座53伸出,伸出量为δ3,见图26和图27,对拖曳架2首端进行限位,防止拖曳架2两端头脱轨;
111.13)推杆缩回至存放工位。拖曳架2完成入轨,由收放存储舱内探测设备的导向轨道约束限位后,图6横向限位机构6的液压缸二66缩回,带动由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63缩回至存放工位;
112.14)防止悬挂链3脱轨。拖曳架2入轨完毕后继续回收探测单元4。图5纵向限位机构5的液压缸一56(前)伸出,带动由前纵推箱体结构55导向的前限位孔座53伸出,伸出量为
△
1,防止悬挂链3从后限位孔座52和前限位孔座53跳脱,见图14和15;当探测单元4悬挂轴接近及通过后限位孔座52和前限位孔座53时,将前限位孔座53伸出量调整为
△
2,见图16和
17,探测单元4悬挂轴通过后限位孔座52和前限位孔座53进入收放存储舱内探测设备的导向轨道后,再将前限位孔座53伸出量调整回
△
1,反复操作,直至所有探测单元4回收完毕;
113.15)存放工位推杆锁定。探测设备回收完毕后,图8横向锁销机构8的液压缸四83缩回,带动由锁销座二82导向的锁销二81伸出(插销),将图6横向限位机构6的左横推箱体结构61、右横推箱体结构65锁定,由左横推箱体结构61、右横推箱体结构65导向的左推杆62、右推杆63同时锁定;
114.16)存放工位限位孔座锁定。图7纵向锁销机构7的液压缸三73缩回,带动由锁销座一72导向的锁销一71伸出(插销),将图5纵向限位机构5的后纵推箱体结构51和前纵推箱体结构55锁定;由后纵推箱体结构51和前纵推箱体结构55导向的后限位孔座52和前限位孔座53同时锁定。
115.当探测设备拖曳作业时,先伸出推杆横向推缆入位,将拖缆横向运动幅度限制在限位孔座下口沿范围内,纵向运动幅度限制在推杆长度范围内;然后伸出限位孔座纵向推缆入位,将拖缆推入闭合后的限位孔座,实现拖缆拖曳的约束限位。
116.当探测设备布放或回收作业时,探测单元进入月池后,通过控制前限位孔座的伸出量,防止悬挂链从限位孔座中跳脱,实现探测单元的布放或回收。
117.当回收探测设备时,拖曳架进入月池内预定高度位置后,先伸出推杆迫正拖曳架,将拖曳架的横向运动幅度限制在过渡轨道的内壁横向宽度范围内,纵向运动幅度限制在过渡轨道内壁纵向长度范围内;然后通过控制前限位孔座的伸出量,对拖曳架限位,防止拖曳架从限位孔座跳脱;在过渡轨道和限位孔座的约束限位下,引导拖曳架进入收放存储舱内的导向轨道,实现拖曳架回收。
118.以上所述,仅为本发明的较佳实施例,并非对本发明任何形式上和实质上的限制,应当指出,对于本技术领域的普通技术人员,在不脱离本发明的前提下,还将可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。凡熟悉本专业的技术人员,在不脱离本发明的精神和范围的情况下,当可利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本发明的等效实施例;同时,凡依据本发明的实质技术对上述实施例所作的任何等同变化的更动、修饰与演变,均仍属于本发明的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1