一种用于复杂水域应急救援微型机器人
1.本发明具体涉及一种用于复杂水域应急救援微型机器人。
背景技术:
2.水下机器人的水下运动和作业,是由操作员在水面母舰上控制和监视。靠电缆向本体提供动力和交换信息。中继器可减少电缆对本体运动的干扰。新型潜水器从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行监视并排除故障。开始研制智能水下机器人系统。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动、回避障碍、自主地完成指定任务。在实际水域中,水下地形情况复杂,狭小空间的水域并不稀少,遇到紧急情况需要及时搜索并支援需求时,大中型机器人的使用局限性凸显,在使用过程中因无法探测到狭小水域导致出现搜救盲区,影响实时搜救的时效和结果,易错过狭小水域内的隐藏信息,随着水下悬浮物、浮游物的增多,水下机器人与水下悬浮物、浮游物的接触几率加大,当被水草或其他水下游离物缠绕时,难以及时脱身,影响搜救区域的有效开展,影响搜救时效。
技术实现要素:
3.为克服现有技术所存在的缺陷,现提供一种用于复杂水域应急救援微型机器人,以解决上述问题。
4.一种用于复杂水域应急救援微型机器人,包括扁形块体、中心内芯体和两个推进内芯,所述扁形块体为轻质块体,扁形块体的顶面为圆弧形,扁形块体的两侧分别为弧形侧,扁形块体的底面加工有两个对称设置的异形槽,所述扁形块体沿其长度方向分别加工有中心孔和两个侧孔,中心孔和两个侧孔并列设置,中心孔处于两个侧孔之间,所述中心内芯体穿设在中心孔内,每个侧孔内穿设有一个推进内芯,中心内芯体的前端为数据采集端,扁形块体和中心内芯体在两个推进内芯带动下做出上浮、前移和/或下潜运动。
5.作为优选方案:中心内芯体包括头舱壳体、储水舱壳体、尾部控制舱体、隔离座片、穿线管、隔离定位片、水泵和两个储水隔离片,所述头舱壳体包括半球形壳体和圆筒体,半球形壳体的敞口端通过隔离座片与圆筒体的一端相连接,圆筒体的另一端通过隔离定位片与尾部控制舱体的一端相连接,尾部控制舱体内设置有供电电池,穿线管设置在储水舱壳体内,穿线管的一端穿过隔离座片与头舱壳体的内部相连通,穿线管的另一端穿过隔离定位片与尾部控制舱体的内部相连通,两个储水隔离片并列套装在穿线管上,每个储水隔离片的外径小于储水舱壳体的内径,储水舱壳体的内部通过穿线管和两个储水隔离片的配合形成有一个中心水腔和两个端部水腔,中心水腔内设置有水泵,水泵的进水口穿过储水舱壳体的侧壁设置在储水舱壳体外。
6.作为优选方案:头舱壳体内设置有摄像云台机构和支撑架,摄像云台机构通过支
撑架与隔离座片相连接,摄像云台机构配合设置有供电线束,供电线束的一端与摄像云台机构相连接,供电线束的另一端穿过穿线管与供电电池相连接,摄像云台机构包括旋转平台、电机支架、电机盒、固定片、摄像头、两个第一锥齿轮和两个步进电机,旋转平台为锥形凸台,锥形凸台的锥形斜面沿其圆周方向加工有多个齿,旋转平台的底部设置在支撑架上,电机支架设置在旋转平台的上方,电机支架和旋转平台的顶面间隙设置,电机支架内设置有电机盒,电机盒上通过固定片与摄像头相连接,两个步进电机并列设置在电机盒内,两个步进电机的输出轴背向设置,每个步进电机的输出轴上套装有一个第一锥齿轮,两个第一锥齿轮分别与锥形凸台的多个齿啮合配合,摄像头通过旋转平台和两个第一锥齿轮的啮合配合实现沿旋转平台圆周方向的自转运动。
7.作为优选方案:每个推进内芯包括前防护罩体、筒状外壳、推进总成和后防护罩体,自防护推进总成设置在筒状外壳内,筒状外壳的两端分别设置有前防护罩体和后防护罩体,所述自防护推进总成包括前轴体、抗冲击头、固定电机、锥齿轮组反向机构、反桨叶、正桨叶、两个定刀片和两个动刀片,前轴体设置在筒状外壳内,前轴体的前端设置有抗冲击头,抗冲击头上设置有两个动刀片,筒状外壳的内壁上固定连接有两个定刀片,每个动刀片分别与两个定刀片相配合形成有两个切割部,固定电机固定安装在筒状外壳内,固定电机的一个动力输出轴为第一动力输出轴,第一动力输出轴与前轴体同轴连接,固定电机的另一个动力输出轴为第二动力输出轴,第二动力输出轴上套装有正桨叶,锥齿轮组反向机构和反桨叶均套装在固定电机的第二动力输出轴上,反桨叶靠近正桨叶设置。
8.作为优选方案:所述齿轮组反向机构包括箱体、轴承、副轴套、主动锥齿轮、被动锥齿轮和两个传动锥齿轮,箱体套装在固定电机的第二动力输出轴上,主动锥齿轮、被动锥齿轮和两个传动锥齿轮均设置在箱体内,主动锥齿轮套装在第二动力输出轴上,被动锥齿轮通过轴承套装在第二动力输出轴上,轴承外套装有副轴套,副轴套外套装有反桨叶,两个传动锥齿轮并列设置在箱体的内壁上,主动锥齿轮通过两个传动锥齿轮与被动锥齿轮相啮合。
9.作为优选方案:前防护罩体和后防护罩体均为朝外凸起的多棱弧形罩体,前防护罩体包括外支撑环片和多个弧形条,多个弧形条沿外支撑环片的圆周方向布置在外支撑环片内孔中,每个弧形条沿筒状外壳的轴向方向向外弯曲,多个弧形条的一端交汇形成中心遮挡部,中心遮挡部处于外支撑环片的轴向方向的中心轴线上,每个弧形条的另一端固定连接在外支撑环片,相邻两个弧形条之间形成有水流通过间隙。
10.作为优选方案:两个异形槽以中心孔轴向方向的中心轴线为对称轴对称设置,每个异形槽为倾斜式槽体,每个异形槽的一侧边与其靠近的侧孔轴向方向的中心轴线处于同一竖直面上,每个异形槽的另一侧边与中心孔轴向方向的中心轴线处于同一竖直面上,每个异形槽的槽深从靠近侧孔的一侧边至其另一侧边依次递减。
11.本发明的有益效果在于:一、本发明为一种自身结构合理且紧凑的微小型水下救援机器人,通过扁形块体、中心内芯体和两个推进内芯之间相互配合能够在复杂水域中的狭小区域内穿梭自如,及时捕捉水下狭小区域内的相关信号,中心内芯体中的摄像云台机构为广角获取图像信息的机构,能够针对江河水域的能见度,以及救援目标的颜色特征及轮廓特征,对救援目标进行快速识别、定位。
12.二、本发明通过中心内芯体和两个推进内芯之间相对位置的布置能够使机器人本身具有可靠的运行平稳性,每个推进内芯中前防护罩体、筒状外壳、后防护罩体、前轴体、抗冲击头、固定电机、锥齿轮组反向机构、反桨叶、正桨叶、两个定刀片和两个动刀片之间相互配合能够提高推进效率,解决水下机器人单桨推进器产生偏转扭矩,以及能耗过高的问题,同时还能够解决现有螺旋桨推进器易被水草缠绕的问题,自身防护性能稳定,防护方向准确有效,从而确保机器人在江河水域顺利作业,救援时效稳定可靠,救援效果稳定且持续。
附图说明
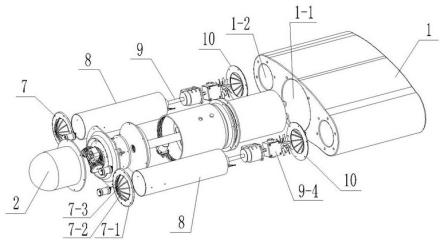
13.图1为本发明的仰视结构示意图;图2为本发明的主视结构示意图;图3为本发明的侧视结构示意图;图4为本发明的第一立体结构示意图;图5为本发明的第二立体结构示意图;图6为本发明的第三立体结构示意图;图7为本发明的第四立体结构示意图;图8为本发明的第五立体结构示意图;图9为本发明的爆炸图;图10为扁形块体的立体结构示意图;图11为扁形块体的主视结构示意图;图12为图11中a-a处的剖面结构示意图;图13为中心内芯体的立体结构示意图;图14为中心内芯体的爆炸图;图15为中心内芯体的侧视结构剖面示意图;图16为推进内芯的侧视结构示意图;图17为推进内芯的侧视结构剖面示意图;图18为锥齿轮组反向机构、反桨叶、正桨叶与固定电机的另一个动力输出轴之间连接关系的立体结构示意图;图19为摄像云台机构的立体结构示意图;图20为摄像云台机构的爆炸图;图21为图17中b处放大结构示意图。
14.图中:1-扁形块体;1-1-中心孔;1-2-侧孔;2-中心内芯体;2-1-头舱壳体;2-1-1-半球形壳体;2-1-2-圆筒体;2-2-储水舱壳体;2-2-1-中心水腔;2-2-2-端部水腔;2-3-尾部控制舱体;2-4-隔离座片;2-5-穿线管;2-6-隔离定位片;2-7-水泵;2-8-储水隔离片;3-推进内芯;4-异形槽;5-摄像云台机构;5-1-旋转平台;5-2-电机支架;5-3-电机盒;5-4-固定片;5-5-摄像头;5-6-第一锥齿轮;5-7-步进电机;6-支撑架;7-前防护罩体;7-1-外支撑环片;7-2-弧形条;7-3-中心遮挡部;8-筒状外壳;9-推进总成;9-1-前轴体;9-2-抗冲击头;9-3-固定电机;9-3-1-第一动力输出轴;9-3-2-第二动力输出轴;9-4-锥齿轮组反向机构;9-4-1-箱体;9-4-2-轴承;9-4-3-副轴套;9-4-4-1-主动锥齿轮;9-4-4-2-被动锥齿轮;9-4-5-传动锥齿轮;9-5-反桨叶;9-6-正桨叶;9-7-定刀片;9-8-动刀片;10-后防护罩体;11-第一
配重部位;12-第二配重部位;13-第一刀刃侧;14-第二刀刃侧;15-第三刀刃侧。
具体实施方式
15.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
16.具体实施方式一:结合图1至图21说明本实施方式,本实施方式包括扁形块体1、中心内芯体2和两个推进内芯3,所述扁形块体1沿其长度方向分别加工有中心孔1-1和两个侧孔1-2,中心孔1-1和两个侧孔1-2并列设置,中心孔1-1处于两个侧孔1-2之间,所述中心内芯体2穿设在中心孔1-1内,每个侧孔1-2内穿设有一个推进内芯3,所述扁形块体1为轻质块体,其起到外壳防护作用,自身还具有配重位置,分别为处于中心孔1-1的两侧,具体在中心孔1-1和两个侧孔1-2之间形成有第一配重部位11和第二配重部位12,第一配重部位11和第二配重部位12对称设置,既能够实现对整机的配重功能,还能够利于扁形块体1实现外形小、结构紧凑以及定位配重的效果,利于整机运行的平稳性。
17.本实施方式中第一配重部位11和第二配重部位12结构和尺寸相同,纵向截面形状为对称结构的沙漏造型,为中心内芯体2和两个推进内芯3提供有利且足够的内置空间。第一配重部位11的最窄处的最大宽度值与中心孔1-1的半径尺寸相配合设置,第一配重部位11的最窄处的最小宽度值小于侧孔1-2的直径且同时大于侧孔1-2的半径。
18.本实施方式中扁形块体1的顶面为圆弧形,扁形块体1的两侧分别为弧形侧,扁形块体1的底面加工有两个对称设置的异形槽4,中心内芯体2的前端为数据采集端,扁形块体1和中心内芯体2在两个推进内芯3带动下做出上浮、前移和/或下潜运动。
19.本发明通过现有电控程序控制能够实现反馈稳定性控制、深度和航向保持以及自主导航,与多种传感器兼容并进行数据记录的工作过程。
20.具体实施方式二:本实施方式为具体实施方式一的进一步限定,本实施方式的中心内芯体2包括头舱壳体2-1、储水舱壳体2-2、尾部控制舱体2-3、隔离座片2-4、穿线管2-5、隔离定位片2-6、水泵2-7和两个储水隔离片2-8,所述头舱壳体2-1包括半球形壳体2-1-1和圆筒体2-1-2,半球形壳体2-1-1的敞口端通过隔离座片2-4与圆筒体2-1-2的一端相连接,圆筒体2-1-2的另一端通过隔离定位片2-6与尾部控制舱体2-3的一端相连接,尾部控制舱体2-3内设置有供电电池,供电电池为整个机器人提供电力,穿线管2-5设置在储水舱壳体2-2内,穿线管2-5的一端穿过隔离座片2-4与头舱壳体2-1的内部相连通,穿线管2-5的另一端穿过隔离定位片2-6与尾部控制舱体2-3的内部相连通,两个储水隔离片2-8并列套装在穿线管2-5上,每个储水隔离片2-8的外径小于储水舱壳体2-2的内径,从而使储水隔离片2-8的端部与储水舱壳体2-2内壁形成缝隙,利于储水舱壳体2-2内进水或排水时提供通道,储水舱壳体2-2的内部通过穿线管2-5和两个储水隔离片2-8的配合形成有一个中心水腔2-2-1和两个端部水腔2-2-2,中心水腔2-2-1内设置有水泵2-7,水泵2-7的进水口穿过储水舱壳体2-2的侧壁设置在储水舱壳体2-2外。
21.本实施方式中储水舱壳体2-2的进水顺序通过一个中心水腔2-2-1和两个端部水腔2-2-2的划分形成空间环境下的有序进水,在中心水腔2-2-1内进入大量水后在进入端部
水腔中,出水时中心水腔2-2-1先排出较多水量后,两个端部水腔2-2-2再进一步排水,从而利于储水舱壳体2-2内形成定量定向的进、出水过程,使整机重量调节过程中的有序进排水确保整机平稳,避免快速失衡、抖动过大的情况发生。
22.具体实施方式三:本实施方式为具体实施方式一或二的进一步限定,本实施方式中头舱壳体2-1内设置有摄像云台机构5和支撑架6,摄像云台机构5通过支撑架6与隔离座片2-4相连接,摄像云台机构5配合设置有供电线束,供电线束的一端与摄像云台机构5相连接,供电线束的另一端穿过穿线管2-5与供电电池相连接,摄像云台机构5包括旋转平台5-1、电机支架5-2、电机盒5-3、固定片5-4、摄像头5-5、两个第一锥齿轮5-6和两个步进电机5-7,旋转平台5-1为锥形凸台,锥形凸台的锥形斜面沿其圆周方向加工有多个齿,旋转平台5-1的底部设置在支撑架6上,电机支架5-2设置在旋转平台5-1的上方,电机支架5-2和旋转平台5-1的顶面间隙设置,电机支架5-2内设置有电机盒5-3,电机盒5-3上通过固定片5-4与摄像头5-5相连接,两个步进电机5-7并列设置在电机盒5-3内,两个步进电机5-7的输出轴背向设置,每个步进电机5-7的输出轴上套装有一个第一锥齿轮5-6,两个第一锥齿轮5-6分别与锥形凸台的多个齿啮合配合,摄像头5-5通过旋转平台5-1和两个第一锥齿轮5-6的啮合配合实现沿旋转平台5-1圆周方向的自转运动。
23.本实施方式中具有能够周向转动和俯仰兼备的现有摄像设备也可替换摄像云台机构5。
24.具体实施方式四:本实施方式为具体实施方式一、二或三的进一步限定,本实施方式的每个推进内芯3包括前防护罩体7、筒状外壳8、推进总成9和后防护罩体10,自防护推进总成9设置在筒状外壳8内,筒状外壳8的两端分别设置有前防护罩体7和后防护罩体10,所述自防护推进总成9包括前轴体9-1、抗冲击头9-2、固定电机9-3、锥齿轮组反向机构9-4、反桨叶9-5、正桨叶9-6、两个定刀片9-7和两个动刀片9-8,前轴体9-1设置在筒状外壳8内,前轴体9-1的前端设置有抗冲击头9-2,抗冲击头9-2上设置有两个动刀片9-8,筒状外壳8的内壁上固定连接有两个定刀片9-7,每个动刀片9-8分别与两个定刀片9-7相配合形成有两个切割部,固定电机9-3固定安装在筒状外壳8内,固定电机9-3的一个动力输出轴9-3-1与前轴体9-1同轴连接,固定电机9-3的另一个动力输出轴9-3-2上套装有正桨叶9-6,锥齿轮组反向机构9-4和反桨叶9-5均套装在固定电机9-3的另一个动力输出轴9-3-2上,反桨叶9-5靠近正桨叶9-6设置。
25.本实施方式中固定电机9-3为现有电机产品,其固定连接在筒状外壳8的内壁上。
26.本实施方式中两个动刀片9-8配合设置有轴套,轴套固定套装在前轴体9-1上,两个动刀片9-8均固定设置在前轴体9-1上,两个动刀片9-8均为半月牙刀体,动刀片9-8的外侧边为第一刀刃侧13,第一刀刃侧13为弧形侧,如此设置能够节省占地空间的情况下,还能够使刀刃侧最大尺寸化。对应的,两个定刀片9-7为三角形刀片,占地空间小且具有较强稳定性,定刀片9-7朝向动刀片9-8的一侧为第二刀刃侧14,定刀片9-7的第二刀刃侧14与动刀片9-8的第一刀刃侧13相对设置,定刀片9-7朝向前防护罩体7的一侧为第三刀刃侧15。动刀片9-8的第一刀刃侧13、定刀片9-7的第二刀刃侧14和第三刀刃侧15之间相互配合能够实现多面交错的切割系统,使定刀片9-7和动刀片9-8所在空间区域内实现全方位无漏位的立体切割效果。
27.具体实施方式五:本实施方式为具体实施方式一、二、三或四的进一步限定,本实
施方式中所述齿轮组反向机构9-4包括箱体9-4-1、轴承9-4-2、副轴套9-4-3、主动锥齿轮9-4-4-1、被动锥齿轮9-4-4-2和两个传动锥齿轮9-4-5,箱体9-4-1套装在固定电机9-3的第二动力输出轴9-3-2上,主动锥齿轮9-4-4-1、被动锥齿轮9-4-4-2和两个传动锥齿轮9-4-5均设置在箱体9-4-1内,主动锥齿轮9-4-4-1套装在第二动力输出轴9-3-2上,被动锥齿轮9-4-4-2通过轴承9-4-2套装在第二动力输出轴9-3-2上,轴承9-4-2外套装有副轴套9-4-3,副轴套9-4-3外套装有反桨叶9-5,两个传动锥齿轮9-4-5并列设置在箱体9-4-1的内壁上,主动锥齿轮9-4-4-1通过两个传动锥齿轮9-4-5与被动锥齿轮9-4-4-2相啮合。
28.具体实施方式六:本实施方式为具体实施方式一、二、三、四或五的进一步限定,前防护罩体7和后防护罩体10均为朝外凸起的多棱弧形罩体,前防护罩体7包括外支撑环片7-1和多个弧形条7-2,多个弧形条7-2沿外支撑环片7-1的圆周方向布置在外支撑环片7-1内孔中,每个弧形条7-2沿筒状外壳8的轴向方向向外弯曲,多个弧形条7-2的一端交汇形成中心遮挡部7-3,中心遮挡部处于外支撑环片7-1的轴向方向的中心轴线上,每个弧形条7-2的另一端固定连接在外支撑环片7-1,相邻两个弧形条7-2之间形成有水流通过间隙。
29.具体实施方式七:本实施方式为具体实施方式六的进一步限定,两个异形槽4以中心孔1-1轴向方向的中心轴线为对称轴对称设置,每个异形槽4为倾斜式槽体,每个异形槽4的一侧边与其靠近的侧孔1-2轴向方向的中心轴线处于同一竖直面上,每个异形槽4的另一侧边与中心孔1-1轴向方向的中心轴线处于同一竖直面上,每个异形槽4的槽深从靠近侧孔1-2的一侧边至其另一侧边依次递减。
30.本发明的工作原理如下:本发明中扁形块体1、中心内芯体2和两个推进内芯3之间配合过程通过救援人员手动遥控,人机互联在计算机上实时同步摄像画面,同时现有ai算法帮助识别图像,辅助搜索;前进时依靠扁形块体1内两侧的两个推进内芯3实现扁形块体1合理布局做到平衡重心,自防护推进总成9中前轴体9-1、抗冲击头9-2、固定电机9-3、锥齿轮组反向机构9-4、反桨叶9-5和正桨叶9-6之间相互配合实现最大化推进效率;同时自防护推进总成9中前轴体9-1、抗冲击头9-2、两个定刀片9-7、两个动刀片9-8、前防护罩体7和后防护罩体10之间相互配合能够防止水草卷入。上升、下潜运动的原理是通过布置通过中心内芯体2内储水量变化实现自重调整。
31.本发明的推进总成9的安装方法如下:通过扁形块体1中每个筒状外壳8的两端分别配合设置有一个前防护罩体7和一个后防护罩体10,通过前防护罩体7和后防护罩体10前后实现同轴双位置的夹紧过程,使筒状外壳8内的推进总成9的安装位置稳定耐用,推进器外壳稍长,筒状外壳8与侧孔1-2之间过盈配合。
32.本发明的中心内芯体9的安装方法如下:方法与推进器安装方法类似,中心内芯体9与中心孔1-1之间过盈配合。
33.本发明中反桨叶9-5和正桨叶9-6均为螺旋桨结构,转动方向相反,通过前轴体9-1、固定电机9-3、锥齿轮组反向机构9-4、反桨叶9-5和正桨叶9-6之间相互配合能够实现内置螺旋桨的过程,同时还能够防止水流倒涌,损耗推进效率,前防护罩体7上的水流通过间隙实现前进水的作用,前防护罩体7、后防护罩体10、前轴体9-1、抗冲击头9-2、固定电机9-3、锥齿轮组反向机构9-4、反桨叶9-5、正桨叶9-6、两个定刀片9-7和两个动刀片9-8之间相
互配合能够做到防止水草卷入的同时加大水流推进力,即便有少量水草进入也能够通过两个定刀片9-7和两个动刀片9-8之间相互配合实现四位周向切割效果,避免反桨叶9-5和正桨叶9-6旋转时卷入水草,做到全方位避免水草堵塞桨叶的效果。
34.本发明中的推进总成9为共轴反桨机构,其中固定电机9-3提供动力源,通过第二动力输出轴9-3-2为反桨叶9-5和正桨叶9-6提供转动动力,主动锥齿轮9-4-4-1套装在第二动力输出轴9-3-2上,带动正桨叶9-6转动,反桨叶9-5通过轴承9-4-2、副轴套9-4-3、被动锥齿轮9-4-4-2和两个传动锥齿轮9-4-5之间相互配合实现转动,能够同时实现正桨叶9-6和反桨叶9-5的正反转,实现共轴反桨的效果。推进总成9的结构形式能够有效抵消单桨叶带来的偏转扭力,同时正桨叶9-6带动的水流可以推动反桨叶9-5,实现狭长紧凑空间环境下的节能省力情况下获得较大的推进力的过程。
35.本发明中的摄像云台机构5通过旋转平台5-1、电机支架5-2、电机盒5-3、固定片5-4、两个第一锥齿轮5-6和两个步进电机5-7之间相互配合能够实现摄像头5-5的周向转动,摄像头5-5转动方向为旋转平台5-1的周向方向,摄像头5-5的可视角广。对应的,半球形壳体2-1-1为透明材料制成的壳体,便于摄像头5-5实现周向方向下360度的图像采集,采集图像方向无死角。摄像头5-5优选为4k高清摄像头。
36.本发明实际水下操作过程为:首先,技术人员携带本发明与供电设备至目标水域。
37.再将本发明通过线缆连接供电设备与电脑,实现供电与信号传输。
38.然后,本发明下水,并开机启动,通过电脑端软件-qgroundcontrol,监测机器人姿态,由pixhawk飞控中集成的陀螺仪,加速度计,深度计等传感器实时显示机器人的姿态参数,再由控制台对机器人进行遥控,实现可知、可控,而后视频图像由机器人头部的4k高清摄像头采集,同时摄像头备用两个自由度的旋转机构,可实现半球面的可视范围。6.水下机器人入水后采用定高模式,机器自动调节反桨叶9-5和正桨叶9-6,维持机器人的水平平衡,防止机器倾覆.此后,中心内芯体2开始工作,首先调节浮沉状态,由储水舱壳体2-2-内水泵2-7工作,调节储水舱壳体2-2内的储水量,使整个机器人维持在合适深度即较高于水底,这样摄像头5-5的视野范围更为良好。
39.而后,开启巡航模式,机器人在固定高度下进行巡航,推进动力由分布于机器人两侧的推进内芯3提供,共轴反桨结构形式的推进内芯3由锥齿轮组反向机构9-4变向,实现正反螺旋桨分别正反转,抵消了单桨叶带来的偏转扭力,保障了机器人水平运动的稳定。
40.当本发明处于巡航状态时,当操作员发现视频中存在可疑目标时,可操作机器人接近观察,江河水底多为水草密布区域,前防护罩体7、两个定刀片9-7和两个动刀片9-8之间相互配合实现切割搅碎水草,同时对反桨叶9-5和正桨叶9-6起到周向保护作用,可使本发明在水草密布区域航行无忧。
41.当发现目标后,本发明的定位系统得知目标物的具体位置,传递信号至控制中心,随后由相关人员及时进行打捞。
42.本发明能够实现上浮、前移和/或下潜运动水下多种姿态的变化,具体以下几种典型运动姿态,各个运动姿态的工作原理为:机器人入水开始,首先需要原地下潜,整机进入水下;
2的进水过程,储水舱壳体2-2随进水量的增加使其自重增加,从而使整机重量增加,当整机的重力大于浮力时,在两个推进内芯3的驱动下,实现本发明的竖直下潜运动,下潜至一定高度后,关闭水泵2-7,整机重量稳定,机器人下潜高度保持稳定。机器人右侧推进内芯3中的固定电机9-3的第二动力输出轴9-3-2逆时针旋转,第二动力输出轴9-3-2逆时针转动通过锥齿轮组反向机构9-4中主动锥齿轮9-4-4-1、被动锥齿轮9-4-4-2和两个传动锥齿轮9-4-5带动副轴套9-4-3顺时针旋转,此时正桨叶9-6逆时针转动,反桨叶9-5顺时针转动,产生向后的推力。
51.机器人左侧推进内芯3中的固定电机9-3的第二动力输出轴9-3-2顺时针旋转,第二动力输出轴9-3-2顺时针转动通过锥齿轮组反向机构9-4中主动锥齿轮9-4-4-1、被动锥齿轮9-4-4-2和两个传动锥齿轮9-4-5带动副轴套9-4-3逆时针旋转,此时正桨叶9-6顺时针转动,反桨叶9-5逆时针转动,产生向前的推力,机器人整体进行转向航行。航行过程中通过旋转平台5-1、电机支架5-2、电机盒5-3、固定片5-4、两个第一锥齿轮5-6和两个步进电机5-7之间的相互配合实现摄像头5-5的转向拍摄,转向方向为沿旋转平台5-1的径向方向顺时针或逆时针进行360度转动,实现广角动态拍摄,也可根据需要停留在转动过程中的任一角度处进行定向拍摄。
52.当本发明在实时图像中发现可疑目标,需要靠近目标进行具体观察时,工作过程为:摆正机身,面向目标,机器人右侧推进内芯3中的固定电机9-3的第二动力输出轴9-3-2逆时针旋转,带动副轴套副9-4-3顺时针旋转,正桨叶9-6逆时针转动,产生向后的推力,反桨叶9-5顺时针转动,也是产生向后的推力。机器人推进内芯3中的固定电机9-3的第二动力输出轴9-3-2顺时针旋转,第二动力输出轴9-3-2顺时针转动带动该第二动力输出轴9-3-2对应的副轴套9-4-3逆时针旋转,正桨叶9-6顺时针转动,产生后退的推力,反桨叶9-5逆时针转动,也是产生后退的推力。右侧前进,左侧后退,机器人绕中心内芯体2的轴向方向的中心轴线逆时针旋转,机身转向,面对目标后再前进,此时,右侧推进内芯3中的固定电机9-3的第二动力输出轴9-3-2逆时针旋转,带动副轴套9-4-3顺时针转动,正桨叶9-6逆时针转动,产生前进推力,逆桨叶9-5顺时针转动,也是产生前进推力。左右两副推进器推动机器人靠近目标。解除定高模式,下潜靠近,水泵2-7启动,将水抽储水舱壳体2-2内,储水舱壳体2-2处于进水状态,必然导致整机重量增加,从而使重力大于浮力,实现水下机器人的下潜靠近目标。摄像头调整视角,近距离观察并拍摄。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1