一种柔性仿生水下推进装置
1.本实用新型属于推进装置技术领域,具体涉及一种柔性仿生水下推进装置。
背景技术:
2.机器人技术是集仿生学、机构学、材料学、控制技术、机电一体化技术、传感技术与人工智能技术于一体的现代科学技术,是国家工业发展水平以及科技实力的重要体现,特别在军事上有很强的应用性。仿生潜航器的研究更是具有机动性强、噪声低、隐藏于生物环境中不易辨识等优势,相比传统常规海战兵器更具经济性、突发性、欺骗性、隐蔽性和高生存率。仿生水下潜航器的仿生对象多种多样,其中以仿鱼机器人最为普遍。鱼类经过上亿年的进化,能够通过调节自身肌肉来改变自身刚度,从而处在复杂的水下环境以及不同的运动状态时,都能保证良好的运动特性。
3.仿生水下潜航器要能适应水下环境并有效完成任务,需要应对两个挑战:一是水下复杂多变的环境。水中环境流动比较复杂,对于河流来说,有固定水流方向,同时也有暗流和漩涡,对于湖泊来说会有风浪,而对于海水,还有较大的风浪和潮汐。因此仿生潜航器要有较高的推进速度和推进力来防止被困;二是多任务多作业的完成。潜航器需要在水下完成多种作业,不同作业对其性能提出不同要求。如水下巡检,需具有较高的推进效率,在有限的能源供给下完成大范围游动;又如水下侦查,既需具有较高机动性,能穿越各种障碍迅速到达所需侦查的目的地,又需较好的稳定性和隐蔽性以防暴露目标。
4.相比目前应用较多的螺旋桨水下推进装置的水下推进器而言,仿鱼水下推进装置经过长时间的进化形成的其特有的推动形式具有更好的机动性和对水下复杂情况适应性,而且推进效率更高。根据鱼类的推进模式不同,鱼水下推进装置大致可以分为身体/尾鳍推进模式和中央鳍/对鳍推进模式,其中身体/尾鳍推进模式因其在机械结构上更容易实现和推进效率更高而在仿生鱼中应用更多。
5.仿鱼水下推进装置的身体/尾鳍推进模式主要是靠尾鳍的往复摆动来控制鱼体在水中前进,在以前的研究中完成尾鳍的往复运动一般使用电机带动曲柄机构产生往复摆动。该种驱动形式的仿生鱼虽然比较容易实现尾鳍的往复运动,但是也存在灵活性差、推进效率低等缺点。
技术实现要素:
6.为了实现上述目的,本实用新型提供了一种柔性仿生水下推进装置,该柔性仿生水下推进装置灵活性好、推进效率高。
7.本实用新型的一种柔性仿生水下推进装置的技术方案是:
8.一种柔性仿生水下推进装置,包括仿生主体、连接架、第一摆动机构、第二摆动机构以及仿生鱼鳍;所述第一摆动机构的固定端固定连接在所述仿生主体的后端,所述第一摆动机构的摆动端与所述连接架的前端固定连接、用于驱动所述连接架左右摆动,所述第二摆动机构的固定端固定连接在所述连接架上,所述第二摆动机构的摆动端与所述仿生鱼
鳍连接、用于驱动所述仿生鱼鳍左右摆动,所述第一摆动机构的摆动轴线与所述第二摆动机构的摆动轴线均沿上下方向延伸。
9.作为对上述技术方案的进一步改进,所述仿生主体包括筒状的壳体以及密封筒,所述壳体包括仿生鱼头形的鱼头段以及仿生鱼身形的鱼身段,所述壳体的两端开口,所述密封筒安装在所述壳体内,所述密封筒的前端向前穿出所述壳体前端。
10.作为对上述技术方案的进一步改进,所述鱼身段包括本体以及通过螺栓固定连接在所述本体后端的连接座,所述本体与所述鱼头段为一体式结构,所述连接座包括圆环段以及位于所述圆环段后端下侧的弧形段,所述圆环段与所述弧形段为一体式结构,所述弧形段上设有用于安装第一舵机的安装槽。
11.作为对上述技术方案的进一步改进,所述本体的外壁后端设有若干个沿所述本体周向分度布置的第一安装柱,所述圆环段的外壁上前端设有若干个与所述第一安装柱一一对应的第二安装柱,所述圆环段与所述本体通过穿装在所述第一安装柱与所述第二安装柱内的螺栓固定连接。
12.作为对上述技术方案的进一步改进,所述密封筒包括筒体以及密封盖,所述筒体的前端呈子弹头状结构,所述筒体的后端设有外凸缘,所述密封盖密封固定连接在所述外凸缘上,所述壳体的内孔为台阶孔,所述台阶孔的台阶部与所述外凸缘固定挡止,所述筒体内安装有控制器,所述控制器通过连接线与所述第一摆动机构和第二摆动机构电连接,所述密封盖上设有两个与所述连接线密封配合的线管。
13.作为对上述技术方案的进一步改进,所述第一摆动机构包括第一舵机,所述第一舵机安装在所述安装槽内,所述第一舵机的输出轴竖直朝上布置,所述第一舵机的输出轴端部安装有水平延伸的第一摆动板,所述第二摆动机构包括第二舵机,所述第二舵机的输出轴竖直朝下布置,所述第二舵机的输出轴端部安装有水平延伸的第二摆动板。
14.作为对上述技术方案的进一步改进,所述连接架上设有朝下布置、用于安装所述第二舵机的固定槽,所述连接架的前端设有供所述第一摆动板插入的第一插槽,所述仿生鱼鳍上设有供所述第二摆动板插入的第二插槽。
15.本实用新型提供了一种柔性仿生水下推进装置,相比于现有技术,其有益效果在于:
16.本实用新型的柔性仿生水下推进装置通过设置第一舵机和第二舵机,第一舵机驱动连接架左右摆动,第二舵机驱动鱼鳍左右摆动,鱼鳍和连接架的摆动相叠加,即为最终尾鳍摆动的状态,采用该设计弥补了一个摆动机构驱动鱼鳍摆动角度的局限性,使得本实用新型的柔性仿生水下推进装置具备更高的推进效率与良好的机动特性,同时实现多模态的运动。本实用新型的柔性仿生水下推进装置中的主体的壳体呈流线型,美观而实用,同时使质心位于整个装置的中心,在驱动过程中具有良好的推进表现。相比于现有技术,本实用新型的柔性仿生水下推进装置灵活性好、推进效率高。
17.本实用新型的柔性仿生水下推进装置中,通过设置密封筒,密封筒内安装控制器,密封筒上安装有与控制器与第一舵机和第二舵机的连接线密封配合的线筒,采用该设计,增强了本实用新型的柔性仿生水下推进装置的密封性,避免了密封筒内的元器件水浸损坏。
附图说明
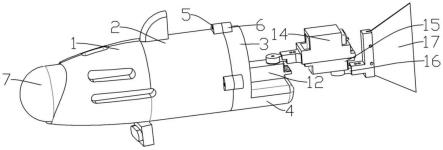
18.图1是本实用新型的柔性仿生水下推进装置的结构示意图;
19.图2是本实用新型的柔性仿生水下推进装置中主体的结构示意图;
20.图3是本实用新型的柔性仿生水下推进装置中主体的内部结构示意图;
21.图4是本实用新型的柔性仿生水下推进装置的部分结构示意图;
22.图中:1、鱼头段;2、本体;3、圆环段;4、弧形段;5、第一安装柱;6、第二安装柱;7、密封筒;8、筒体;9、外凸缘;10、密封盖;11、线管;12、第一舵机;13、第一摆动板;14、连接架;15、第二舵机;16、第二摆动板; 17、仿生鱼鳍。
具体实施方式
23.下面结合附图及具体实施方式对本实用新型作进一步详细描述:
24.本实用新型的柔性仿生水下推进装置的具体实施例,如图1至图4所示,包括仿生主体、连接架14、第一摆动机构、第二摆动机构以及仿生鱼鳍17;第一摆动机构的固定端固定连接在仿生主体的后端,第一摆动机构的摆动端与连接架14的前端固定连接、用于驱动连接架14左右摆动,第二摆动机构的固定端固定连接在连接架14上,第二摆动机构的摆动端与仿生鱼鳍17连接、用于驱动仿生鱼鳍17左右摆动,第一摆动机构的摆动轴线与第二摆动机构的摆动轴线均沿上下方向延伸。
25.本实施例中,仿生主体包括筒状的壳体以及密封筒7,壳体包括仿生鱼头形的鱼头段1以及仿生鱼身形的鱼身段,壳体的两端开口,密封筒7安装在所述壳体内,密封筒7的前端向前穿出壳体前端。鱼身段包括本体2以及通过螺栓固定连接在本体2后端的连接座,本体2与鱼头段1为一体式结构,连接座包括圆环段3以及位于圆环段3后端下侧的弧形段4,圆环段3与弧形段4为一体式结构,弧形段4上设有用于安装第一舵机12的安装槽。
26.本实施例中,本体2的外壁后端设有若干个沿本体2周向分度布置的第一安装柱5,圆环段3的外壁上前端设有若干个与第一安装柱5一一对应的第二安装柱6,圆环段3与本体2通过穿装在第一安装柱5与第二安装柱6内的螺栓固定连接。
27.本实施例中,密封筒7包括筒体8以及密封盖10,筒体8的前端呈子弹头状结构,筒体8的后端设有外凸缘9,密封盖10密封固定连接在外凸缘9上,壳体的内孔为台阶孔,台阶孔的台阶部与外凸缘9固定挡止,筒体8内安装有控制器,控制器通过连接线与第一摆动机构和第二摆动机构电连接,密封盖10 上设有两个与连接线密封配合的线管11。
28.本实施例中,第一摆动机构包括第一舵机12,第一舵机12安装在安装槽内,第一舵机12的输出轴竖直朝上布置,第一舵机12的输出轴端部安装有水平延伸的第一摆动板13,第二摆动机构包括第二舵机15,第二舵机15的输出轴竖直朝下布置,第二舵机15的输出轴端部安装有水平延伸的第二摆动板16。连接架14上设有朝下布置、用于安装第二舵机15的固定槽,连接架14的前端设有供第一摆动板13插入的第一插槽,仿生鱼鳍17上设有供第二摆动板16插入的第二插槽。
29.本实用新型的柔性仿生水下推进装置通过设置第一舵机12和第二舵机15,第一舵机12驱动连接架14左右摆动,第二舵机15驱动鱼鳍左右摆动,鱼鳍和连接架14的摆动相叠加,即为最终尾鳍摆动的状态,采用该设计弥补了一个摆动机构驱动鱼鳍摆动角度的局限性,使得本实用新型的柔性仿生水下推进装置具备更高的推进效率与良好的机动特性,同
时实现多模态的运动。本实用新型的柔性仿生水下推进装置中的主体的壳体呈流线型,美观而实用,同时使质心位于整个装置的中心,在驱动过程中具有良好的推进表现。相比于现有技术,本实用新型的柔性仿生水下推进装置灵活性好、推进效率高。
30.本实用新型的柔性仿生水下推进装置中,通过设置密封筒7,密封筒7内安装控制器,密封筒7上安装有与控制器与第一舵机12和第二舵机15的连接线密封配合的线筒,采用该设计,增强了本实用新型的柔性仿生水下推进装置的密封性,避免了密封筒7内的元器件水浸损坏。
31.以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1