一种监测大型船舶停泊状态的实时监测设备的制作方法
1.本实用新型涉及港口船舶停泊安全的监测设备技术领域,为测定船体的坐标位置及感知船体的摆动姿态的专用设备,尤其是一种监测大型船舶停泊状态的实时监测设备。
背景技术:
2.目前在港口停泊的大型船舶,通常会发生如下的潜在危险:其一,由于受到潮汐,台风等因素的影响,会使船舶的位置发生漂移并对缆绳产生破坏性拉力后导致缆绳断裂;其二,在船舶进行货物装卸时,当载荷不平衡时可能发生船体侧倾及倾覆的危险。
3.现有技术对于船体倾角监控的设备,一般是在船舶驾驶室内配备吊锤式的船体倾斜仪;存在的问题是,由于该倾斜仪无法监测船舶的经纬度坐标位置;此外,倾斜仪只能监控船体左右倾角的变化,所监测的摆动方位单一,无法全方位的监测到船体的摆动姿态,不仅精度差,且精度还会受到安装位置及安装方式影响,不能连续记录整个装卸过程船体倾角的变化过程,发生危险倾角时无法自动报警,由于倾斜仪安装在船体上,只能实现船舶自身的监控,不便通过后台的主控室监控,无法纳入港口统一的安全监控体系。
技术实现要素:
4.本实用新型的目的是针对现有技术的不足而提供的一种监测大型船舶停泊状态的实时监测设备,本实用新型采用4g/gps双模天线接收gps卫星信号并传输至gps通信模块,由gps通信模块调制解调、放大滤波传输至中央处理器,经中央处理器处理后再通过4g通信模块、4g/gps双模天线传输至后台的主控室,对船体的经纬度坐标进行监测,以监控船体的相对位移。
5.本实用新型通过三轴加速度陀螺仪传感器监测到船体在空间晃动的感知的信号,通过三轴陀螺仪运算模块的算法程序解析传输至中央处理器处理后,经中央处理器通过4g通信模块、4g/gps双模天线传输至后台的主控室,对船体在空间晃动的三维坐标进行监测,以监控船体的三维的相对摆动量。
6.本实用新型将gps通信模块、4g通信模块、三轴加速度陀螺仪传感器、三轴陀螺仪运算模块及中央处理器集成于箱体内的主基板上,并将4g/gps双模天线、电源电量显示面板、电源及充电口依次设于箱体上,具有结构紧凑,携带安装方便,便于港口管理方提前发现险情,利于港口管理方及时进行有效地干预,避免重大、恶性安全事故的发生。
7.实现本实用新型目的的具体技术方案是:
8.一种监测大型船舶停泊状态的实时监测设备,其特点包括箱体、4g/gps双模天线、电源电量显示面板、电源、充电口、gps通信模块、4g通信模块、三轴加速度陀螺仪传感器、三轴陀螺仪运算模块及中央处理器;
9.所述箱体的壳体上设有天线座、显示面板座、电源开关座及充电口座,箱体内设有主基板;
10.所述4g/gps双模天线、电源电量显示面板、电源及充电口依次设于天线座、显示面
板座、电源开关座及充电口座上;
11.所述电源与电源电量显示面板、充电口及主基板连接;
12.所述gps通信模块、4g通信模块、三轴加速度陀螺仪传感器、三轴陀螺仪运算模块及中央处理器设于箱体内的主基板上;
13.其中,4g/gps双模天线分别与gps通信模块、4g通信模块数据线连接,中央处理器分别与gps通信模块、4g通信模块及三轴陀螺仪运算模块数据线连接,三轴陀螺仪运算模块与三轴加速度陀螺仪传感器数据线连接。
14.所述箱体的防水等级按照ip67级别制作。
15.所述电源上设有开关。
16.本实用新型的优点:
17.本实用新型通过4g/gps双模天线接收gps卫星信号并传输至gps通信模块,由gps通信模块放大滤波传输至中央处理器处理后,再通过4g通信模块、4g/gps双模天线传输至后台的主控室,对船体的经纬度坐标进行监测,以监控船体的相对位移。
18.本实用新型通过三轴加速度陀螺仪传感器监测到船体在空间晃动的感知的信号,通过三轴陀螺仪运算模块的算法程序解析传输至中央处理器处理后,通过4g通信模块、4g/gps双模天线传输至后台的主控室,对船体在空间晃动的三维坐标进行监测,以监控船体的三维的相对摆动量。
19.本实用新型与后台的主控室配合使用,纳入港口统一的安全监控体系,能连续记录船体在港口停泊及装卸作业的全过程,便于港口管理方提前发现险情,利于港口管理方及时进行有效地干预,避免重大、恶性安全事故的发生。
20.本实用新型三轴陀螺仪运算模块选用的算法程序为“stm32 mpu-6050三轴加速度陀螺仪模块程序”。
附图说明
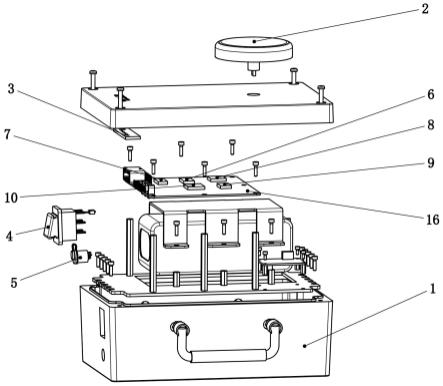
21.图1为本实用新型的结构示意图;
22.图2为本实用新型的工作流程示意图;
23.图3为本实用新型的外形示意图;
24.图4为本实用新型在船体上设置的使用状态示意图。
具体实施方式
25.参阅图1、图3,本实用新型包括箱体1、4g/gps双模天线2、电源电量显示面板3、电源4、充电口5、gps通信模块6、4g通信模块7、三轴加速度陀螺仪传感器8、三轴陀螺仪运算模块9及中央处理器10;
26.所述箱体1的壳体上设有天线座12、显示面板座13、电源开关座14及充电口座15,箱体1内设有主基板16;
27.所述4g/gps双模天线2、电源电量显示面板3、电源4及充电口5依次设于天线座12、显示面板座13、电源开关座14及充电口座15上;
28.所述电源4与电源电量显示面板3、充电口5及主基板16连接。
29.参阅图1、图2、图3,所述gps通信模块6、4g通信模块7、三轴加速度陀螺仪传感器8、
三轴陀螺仪运算模块9及中央处理器10设于箱体1内的主基板16上;
30.其中,4g/gps双模天线2分别与gps通信模块6、4g通信模块7数据线连接,中央处理器10分别与gps通信模块6、4g通信模块7及三轴陀螺仪运算模块9数据线连接,三轴陀螺仪运算模块9与三轴加速度陀螺仪传感器8数据线连接。
31.所述箱体1的防水等级按照ip67级别制作。
32.参阅图1、图3,所述电源4上设有开关。
33.本实用新型是这样工作的:
34.参阅图1、图2,本实用新型与后台的主控室30配合使用。
35.参阅图1、图2、图4,工作时,将本实用新型的箱体1设置于船体20甲板靠近驾驶室21一侧的地面上,且位于船体20龙骨的中轴线22上。
36.参阅图1、图3,开启电源4上设置的开关,为装置供电。由电源电量显示面板3显示电源4的储电量。储电量不足时可通过充电口5为电源4充电。
37.参阅图1、图2、图4,本实用新型通过4g/gps双模天线2 接收gps卫星信号并传输至gps通信模块6,由gps通信模块6调制解调、放大滤波传输至中央处理器10,并经中央处理器10处理后再通过4g通信模块7、4g/gps双模天线2传输至后台的主控室30,通过对船体20的经纬度坐标进行监测,得到船体20的精确为亚米级的经纬度位置坐标,以监控船体20的相对位移。
38.参阅图1、图2、图4,本实用新型将三轴加速度陀螺仪传感器8监测到船体20在空间晃动的感知信号,通过三轴陀螺仪运算模块9的算法程序解析感知信号并传输至中央处理器10,并经中央处理器10处理后通过4g通信模块7、4g/gps双模天线2传输至后台的主控室30,通过对船体20在空间晃动的三维坐标进行监测,感知船体的姿态,以监控船体20的三维的相对摆动量。
39.参阅图1、图3,为保证本实用新型在高盐高湿的室外环境下,保护箱体1内部的电子元器件能够长期稳定的工作,本实用新型箱体1的防水等级按照ip67级别制作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1