一种基于机器视觉的高精度水下目标定位装置的制作方法
1.本实用新型涉及水下探测技术领域,尤其涉及一种基于机器视觉的高精度水下目标定位装置。
背景技术:
2.水下机器人,或叫遥控无人潜水器(remote operational vehicle,简称rov),是一种利用自身搭载的仪器设备在水下进行人为操纵作业的潜水设备。rov是目前世界上使用最为广泛的潜水器,在海洋工程和军事等领域发挥着重要的作用。
3.在进行水下作业,特别是采用水下机器对水下目标进行定位、搜索、打捞时,对水下机器的拾回和控制往往还是采用捞取或者人工牵线拉起的方式,这种方式效率较低。
技术实现要素:
4.本发明的目的在于提供一种基于机器视觉的高精度水下目标定位装置,以解决现有技术中的上述不足之处。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种基于机器视觉的高精度水下目标定位装置,包括:浮台、车架和设置在浮台上的牵引机构;所述牵引机构包括安装板、第一驱动电机和滑槽,所述浮台一侧固定连接有安装板,所述安装板内部开设有第一电机腔和传动腔,所述第一电机腔内部设置有第一驱动电机,所述传动腔一侧壁转动连接有第一蜗杆,所述第一驱动电机输出端贯穿至传动腔内部且与第一蜗杆一端固定连接,所述第一蜗杆对称啮合连接有两个第一蜗轮,两个所述第一蜗轮一端均通过连接杆与传动腔一侧壁转动连接,所述浮台内部开设有绕线腔,两个所述第一蜗轮另一端均通过连接杆贯穿至绕线腔内部,两个所述第一蜗轮通过连接杆分别固定连接绕线筒和往复丝杆,所述往复丝杆和绕线筒的另一端均与绕线腔侧壁转动连接,所述往复丝杆上螺纹连接有活动块,所述活动块上开设有线孔。
6.作为上述技术方案的进一步描述:
7.所述夹持机构包括第一夹板、弹簧和第二夹板,所述安装板上表面开设有凹槽,所述凹槽内部一侧固定连接有弹簧,所述凹槽内滑动连接有滑块,所述弹簧一端与滑块固定连接,所述滑块上表面焊接有第一夹板,所述安装板上表面焊接有与第一夹板对应的第二夹板。
8.作为上述技术方案的进一步描述:
9.所述配重机构包括盖板、配重室和配重块,所述车架内部开设有配重室,所述配重室内部设有配重块,所述配重室内侧壁开设有与车架上表面贯穿的孔槽,所述盖板转动连接在孔槽一侧,所述盖板一侧固定连接有锁扣,所述车架上表面设置有与锁扣对应的锁件。
10.作为上述技术方案的进一步描述:
11.所述传动机构包括第二电机腔、传动轴、滚轮和传动室,所述车架内部开设有第二电机腔,所述第二电机腔内设置有第二驱动电机,所述第二驱动电机输出端贯穿至传动室
且固定连接有第二蜗杆,所述第二蜗杆啮合连接有第二蜗轮,所述车架上水平插设有两个传动轴,所述第二蜗轮固定套设在其中一个所述传动轴上,两个所述传动轴两端均固定连接有滚轮。
12.作为上述技术方案的进一步描述:
13.所述绕线筒上开设有线槽。
14.作为上述技术方案的进一步描述:
15.所述安装板下表面固定连接有声波测距仪,所述车架上表面固定连接有声波接收器和牵引钩,所述车架上表面固定连接有摄像头。
16.本实用新型提供了一种基于机器视觉的高精度水下目标定位装置。具备以下有益效果:
17.该基于机器视觉的高精度水下目标定位装置在使用时,使得第一驱动电机工作,第一驱动电机带动第一蜗杆转动,第一蜗杆啮合连接有两个第一蜗轮,两个第一蜗轮转动,其中一个第一蜗轮带动绕线筒转动,另一个带动往复丝杆转动,绕线筒转动,使得线槽内的牵引线散开,往复丝杆上的活动块左右运动,牵引线穿过活动块上的线孔,第一驱动电机持续工作,使得牵引线持续散开,牵引线一端与车架连接,当工作结束时,使得第一驱动电机工作,绕线筒转动收线,牵引线通过线孔有序的被绕在绕线筒的线槽内,结构简单,操作便捷,提高工作的效率,其次,当车架完成工作后,通过把手将其拾起,拉动第一夹板,第一夹板与滑块固定连接,滑块通过弹簧与凹槽一侧连接,弹簧拉伸,当第一夹板与第二夹板之间位置足够时将车架放置其中,松开第一夹板,弹簧收缩,车架被夹持,操作便捷,便于取用和收纳。
附图说明
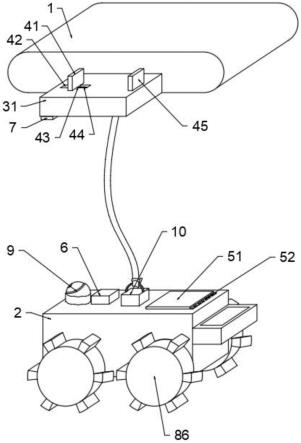
18.图1为本实用新型提出的一种基于机器视觉的高精度水下目标定位装置的整体结构示意图;
19.图2为本实用新型提出的安装板的内部结构示意图;
20.图3为本实用新型的安装板的侧视结构示意图;
21.图4为本实用新型的安装板的结构示意图;
22.图5为本实用新型的车架的结构示意图。
23.图例说明:
24.1、浮台;2、车架;3、牵引机构;31、安装板;32、传动腔;33、绕线腔;34、第一蜗杆;35、第一蜗轮;36、往复丝杆;37、活动块;38、线孔;39、绕线筒;310、线槽;311、第一电机腔;312、第一驱动电机;313、滑槽;4、夹持机构;41、第一夹板;42、凹槽;43、滑块;44、弹簧;45、第二夹板;5、配重机构;51、盖板;52、锁扣;53、配重室;54、配重块;6、声波接收器;7、声波测距仪;8、传动机构;81、第二电机腔;82、第二驱动电机;83、第二蜗杆;84、第二蜗轮;85、传动轴;86、滚轮;87、传动室;9、摄像头;10、牵引钩。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
26.参照图1-5,一种基于机器视觉的高精度水下目标定位装置,包括:浮台1、车架2和设置在浮台1上的牵引机构3;牵引机构3包括安装板31、第一驱动电机312和滑槽313,浮台1一侧固定连接有安装板31,安装板31内部开设有第一电机腔311和传动腔32,第一电机腔311内部设置有第一驱动电机312,传动腔32一侧壁转动连接有第一蜗杆34,第一驱动电机312输出端贯穿至传动腔32内部且与第一蜗杆34一端固定连接,第一蜗杆34对称啮合连接有两个第一蜗轮35,两个第一蜗轮35一端均通过连接杆与传动腔32一侧壁转动连接,浮台1内部开设有绕线腔33,两个第一蜗轮35另一端均通过连接杆贯穿至绕线腔33内部,两个第一蜗轮35通过连接杆分别固定连接绕线筒39和往复丝杆36,往复丝杆36和绕线筒39的另一端均与绕线腔33侧壁转动连接,往复丝杆36上螺纹连接有活动块37,活动块37上开设有线孔38。
27.具体的,使得第一驱动电机312工作,第一驱动电机312带动第一蜗杆34转动,第一蜗杆34啮合连接有两个第一蜗轮35,两个第一蜗轮35转动,其中一个第一蜗轮35带动绕线筒39转动,另一个带动往复丝杆36转动,绕线筒39转动,使得线槽310内的牵引线散开,往复丝杆36上的活动块37左右运动,牵引线穿过活动块37上的线孔38,第一驱动电机312持续工作,使得牵引线持续散开,牵引线一端与车架2连接,当工作结束时。使得第一驱动电机312工作,绕线筒39转动收线,绕线筒39上开设有线槽310,牵引线通过线孔38有序的被绕在绕线筒39的线槽310内,结构简单,操作便捷,提高工作的效率。
28.夹持机构4包括第一夹板41、弹簧44和第二夹板45,安装板31上表面开设有凹槽42,凹槽42内部一侧固定连接有弹簧44,凹槽42内滑动连接有滑块43,弹簧44一端与滑块43固定连接,滑块43上表面焊接有第一夹板41,安装板31上表面焊接有与第一夹板41对应的第二夹板45。
29.具体的,当车架2完成工作后,通过把手将其拾起,拉动第一夹板41,第一夹板41与滑块43固定连接,滑块43通过弹簧44与凹槽42一侧连接,弹簧44拉伸,当第一夹板41与第二夹板45之间位置足够时将车架2放置其中,松开第一夹板41,弹簧44收缩,车架2被夹持,操作便捷,便于取用和收纳。
30.配重机构5包括盖板51、配重室53和配重块54,车架2内部开设有配重室53,配重室53内部设有配重块54,配重室53内侧壁开设有与车架2上表面贯穿的孔槽,盖板51转动连接在孔槽一侧,盖板51一侧固定连接有锁扣52,车架2上表面设置有与锁扣52对应的锁件。
31.具体的,在水中作业时,为了车身能下沉至水底和增加车身在水底工作时的稳定性,需要车身有一定的质量,打开盖板51,将配重块54放置于配重室53内部,关闭盖板51,通过锁扣52将其锁定,安装板31下表面固定连接有声波测距仪7,车架2上表面固定连接有声波接收器6和牵引钩10,车架2上表面固定连接有摄像头9,这样在工作时,车架2会有更好的稳定性,更有利于工作的进行。
32.传动机构8包括第二电机腔81、传动轴85、滚轮86和传动室87,车架2内部开设有第二电机腔81,第二电机腔81内设置有第二驱动电机82,第二驱动电机82输出端贯穿至传动室87且固定连接有第二蜗杆83,第二蜗杆83啮合连接有第二蜗轮84,车架2上水平插设有两个传动轴85,第二蜗轮84固定套设在其中一个传动轴85上,两个传动轴85两端均固定连接有滚轮86。
33.具体的,使得第二驱动电机82工作,第二驱动电机82带动第二蜗杆83转动,第二蜗杆83啮合连接有第二蜗轮84,第二蜗杆83带动第二蜗轮84转动,第二蜗杆83固定套设在其中一个传动轴85上,传动轴85带动滚轮86转动,使得车架2能够移动至目标位置。
34.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
35.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1