一种用于水下机器人的投放装置的制作方法
1.本技术涉及水下机器人投放技术领域,具体公开了一种用于水下机器人的投放装置。
背景技术:
2.水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
3.无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种;
4.在现有技术中,大多数投放装置基本是地面进行牵引投放,这种投放方式比较落后,需要大量的牵引绳,并且需要水下机器人具备大量的动力才能到达水下目的地,严重影响了水下机器人的续航,鉴于此,发明人提出一种用于水下机器人的投放装置。
技术实现要素:
5.本实用新型的目的在于解决了传统的水下机器人投放装置无法直接从水面上投入的问题。
6.为了达到上述目的,本实用新型提供以下基础方案:
7.一种用于水下机器人的投放装置,包括水上漂浮动力机构、设置在水上漂浮动力机构上的牵引机构和设置在牵引机构内的回收放置结构和用于控制的控制手柄;
8.水上漂浮动力机构包括支撑板、固接在支撑板底部的气垫和若干动力桨,所述牵引机构包括固接在支撑板上的安装板、对称设置在安装板上的挡板、设置在挡板之间的转动筒和缠绕连接在转动筒上的若干牵引绳,所述转动筒的一端与挡板转动连接,转动筒的另一端连接有马达,马达安装在另一块挡板上,所述牵引绳的自由端设有放置架;
9.所述回收放置结构包括安装在放置架内底部的气缸、设置在气缸伸出端的回收框,放置在回收框内的水下机器人本体,所述水下机器人本体与回收框可拆卸连接。
10.本基础方案的原理及效果在于:
11.1.与现有技术相比,本装置结构简单,构思巧妙,本装置设置了水上漂浮动力机构,利用水上漂浮动力机构将水下机器人本体运输到目标水面之上,然后利用牵引机构实现下水作业,这种设计的好处在于:不在需要大量的牵引绳,并且不需要水下机器人具备大量的动力才能到达水下目的地,不会严重影响了水下机器人的续航,本装置解决了传统的水下机器人投放装置无法直接从水面上投入的问题。
12.2.与现有技术相比,本装置设置了牵引机构,利用牵引绳实现水下机器人本体的快速下水,整个装置简单,高效,操作性强。
13.3.与现有技术相比,本装置设置了回收放置结构,这种设计更加安全和稳定,当水下机器人回收之后,利用气缸实现水下机器人与放置架分离,使得放置架尽量不要接触水下机器人,进而减少水下机器人的碰撞,使得水下机器人不容易受到损坏。
14.进一步,所述支撑板的底部固接有数量与动力桨相同的连接杆,所述动力桨安装在连接杆的自由端,所述动力桨包括动力电机和与动力电机同轴连接的桨叶。
15.进一步,所述转动筒与挡板的连接处设有转动轴承,所述转动轴承为深沟球轴承。
16.进一步,所述放置架的外侧开有倾斜角,所述倾斜角为45
°
。
17.进一步,所述水下机器人本体设有防水摄像头,所述水下机器人本体的底部设有电磁铁块,所述电磁铁块与控制手柄电连接,所述回收框上设有可与电磁铁块连接的磁铁。
18.进一步,所述电磁铁块外表面涂抹有防水涂料。
19.进一步,所述控制手柄与气缸、马达和动力电机电连接。
20.进一步,所述控制手柄上设有显示屏,所述显示屏与防水摄像头连接。
附图说明
21.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
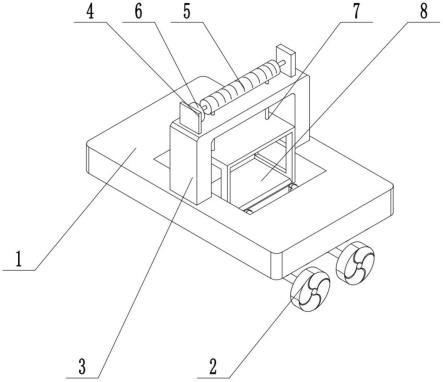
22.图1示出了本技术实施例提出的一种用于水下机器人的投放装置结构示意图;
23.图2示出了本技术实施例提出的一种用于水下机器人的投放装置的正视图;
24.图3示出了本技术实施例提出的一种用于水下机器人的投放装置的中回收放置结构的结构示意图。
具体实施方式
25.为更进一步阐述本实用新型为实现预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效,详细说明如后。
26.说明书附图中的附图标记包括:支撑板1、动力桨2、安装板3、挡板4、转动筒5、马达6、牵引绳7、放置架8、气垫9、连接杆10、气缸11、回收框12、水下机器人本体13、防水摄像头14、磁铁15、电磁铁块16。
27.实施例如图1、图2和图3所示:
28.一种用于水下机器人的投放装置,包括水上漂浮动力机构、设置在水上漂浮动力机构上的牵引机构和设置在牵引机构内的回收放置结构和用于控制的控制手柄,具体的:控制手柄上设有显示屏,显示屏与后续的防水摄像头14电连接,用来实现水下机器人本体13的回收。
29.水上漂浮动力机构包括支撑板1、固接在支撑板1底部的气垫9和若干动力桨2,具体的:如图1和图2所示,支撑板1的底部固接有数量与动力桨2相同的连接杆10,动力桨2安装在连接杆10的自由端,动力桨2包括动力电机和与动力电机同轴连接的桨叶,本实施例中选用了两组动力桨2,通过控制手柄控制动力的电机,和气垫9船原理相同,通过某一个动力电机停车实现转向,进而使得本装置可以到达水面任一地点。
30.牵引机构包括固接在支撑板1上的安装板3、对称设置在安装板3上的挡板4、设置在挡板4之间的转动筒5和缠绕连接在转动筒5上的若干牵引绳7,牵引绳7选用钢索,转动筒
5的右端与挡板4转动连接,转动筒5与挡板4的连接处设有转动轴承,转动轴承为深沟球轴承,转动筒5的左端连接有马达6,马达6安装在另一块挡板4上,牵引绳7的自由端设有放置架8,放置架8的外侧开有倾斜角,倾斜角为45
°
,方便后续的机器人本体的移出。
31.如图3所示,回收放置结构包括安装在放置架8内底部的气缸11、设置在气缸11伸出端的回收框12,放置在回收框12内的水下机器人本体13,水下机器人本体13与回收框12可拆卸连接,水下机器人本体13设有防水摄像头14,水下机器人本体13的底部设有电磁铁块16,电磁铁块16与控制手柄电连接,回收框12上设有可与电磁铁块16连接的磁铁15,电磁铁块16外表面涂抹有防水涂料,控制手柄与气缸11、马达6和动力电机电连接,电磁铁块16磁铁15均采用强磁铁15。
32.具体实现过程:
33.第一步,控制手柄控制气缸11、马达6和动力电机,具体的:控制手柄内部设有控制器,通过控制器输入程序的形式,实现对气缸11、马达6和动力电机的控制,控制动力电机,使得本装置到达目标水面,然后动力电机停车,本装置在水面的漂浮即可。
34.第二步,接着,启动马达6,转动筒5旋转,使得钢索向下,钢索向下,使得放置架8进入水面之下,然后放置架8沉底之后,停止对马达6的使用。
35.第三步,水下机器人本体13以及和它配套的控制装置控制水下机器人本体13移出放置架8,水下机器人本体13开始水面之下的作业,当作业完毕后,就需要对水下机器人本体13的回收;
36.关于回收:水下机器人本体13设有防水摄像头14,通过显示屏操作水下机器人本体13回到放置架8中,虽然由于水面之下环境恶劣,会存在寻找误差,因此,我们的水下机器人本体13必须要安装gps定位装置,然后有利于水下机器人本体13的丢失寻找;
37.通过防水摄像头14判断出水下机器人本体13进入回收框12之后,启动电磁铁块16,通过磁性连接的方式,强化固定水下机器人本体13位置,避免水下机器人本体13晃动,然后,启动气缸11,使得回收框12上升,不再与放置架8接触,这样可以避免由于放置架8的晃动,导致的回收框12以及水下机器人本体13损坏的情况发生。
38.本装置解决了传统的水下机器人投放装置无法直接从水面上投入的问题。
39.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1