一种用于水下检测的水下机器人的制作方法
1.本实用新型涉及水下设备领域,具体是一种用于水下检测的水下机器人。
背景技术:
2.烟波浩森的海洋约占地球总面积的71%,平均深度达到3795米,堪称地球上最大的宝库,随着陆地上不可再生资源的日益减少,海洋在人类生存发展中的地位愈加突出,海洋开发需要先进的技术和装备。水下机器人是目前唯一能够在深海环境工作的装备,随着海洋开发进程的加快,对水下机器人技术提出了更高和更迫切的要求,如申请号为cn202023115607.4的一种用于水下检测的水下机器人,解决了现有水下机器人下潜时耐压控制舱耐压能力不足的问题,属于水下设备领域。所述机器人的壳体前进方向的垂直面方向薄于水平面,水下通信系统固定在壳体顶部,能源系统、耐压检测系统和耐压控制舱设置在壳体内部;可收放式稳定翼固定在壳体尾部的外表面;四个矢量推进器布置在壳体的两侧;耐压控制舱内装有水下机器人的控制系统;耐压控制舱的外壳包括柱壳和多个肋骨,肋骨分布在柱壳外表面,柱壳包括上壳板、下壳板和减压层;上壳板外侧壁与下壳板内侧壁为平行的斜面,上壳板外侧壁与下壳板内侧壁之间形成空隙,该空隙内减压层;减压层的材料为浮力材料、阻尼材料或吸声材料。
3.但是现有的用于水下检测的水下机器人普遍不具备远程自动报警功能,导致水下机器人在水下探测的过程中存在诸多的安全隐患,严重影响了装置在使用时的实用性及其功能性,无法满足现阶段使用者的使用需求,为使用者带来不便,因此,本领域技术人员提供了一种用于水下检测的水下机器人,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种用于水下检测的水下机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种用于水下检测的水下机器人,包括机器人本体和摄像头,所述机器人本体的输入端分别电性连接有震动传感器、电源控制模块和温度传感器,所述温度传感器和震动传感器的输出端均电性连接有信息采集模块,所述信息采集模块的输出端电性连接有信息传输模块,所述信息传输模块的输出端分别电性连接有中央处理器和闪存模块,所述中央处理器的输出端分别电性连接有控制器和信号发射器,所述控制器的输出端电性连接有报警器,所述电源控制模块的内部包括电源状态指示器和漏电传感器。
6.作为本实用新型进一步的方案:所述信号发射器的输出端电性连接有信号接收器,所述信号接收器的输出端电性连接有远端控制主机,所述远端控制主机的输出端分别电性连接有信号转换器和数字转换器。
7.作为本实用新型再进一步的方案:所述数字转换器的输出端电性连接有显示屏,所述信号转换器的输出端与电源控制模块的输入端电性连接。
8.作为本实用新型再进一步的方案:所述闪存模块的输出端电性连接有大容量存储卡,所述大容量存储卡的输入端电性连接有信息加密模块。
9.作为本实用新型再进一步的方案:所述机器人本体的两侧均固定安装有连接件,所述连接件的正面固定安装有安装块,所述机器人本体的顶部固定安装有控制盒。
10.作为本实用新型再进一步的方案:所述安装块的正面固定安装有防护筒,所述防护筒的内腔设置有动力组件。
11.作为本实用新型再进一步的方案:所述机器人本体底部的背面固定安装有固定块,所述摄像头位于固定块背面的中间部位且与固定块固定连接,所述固定块的两侧且位于机器人本体的底部固定安装有加固板。
12.与现有技术相比,本实用新型的有益效果是:
13.1、本实用新型通过本系统的设计可以有效地使机器人本体在水下检测的过程中可以对自身所产生的震动值和实时的温度信息进行监测,同时监测的数值可以实时的发送至远端主机处,并通过中央处理器对信息的自动匹配,可以有效地实现自动化报警及远程的信息安全传输,有效地提升了机器人本体在使用过程中的功能性及其安全性,同时解决了现有的用于水下检测的水下机器人普遍不具备远程自动报警功能,导致水下机器人在水下探测的过程中存在诸多的安全隐患,严重影响了装置在使用时的实用性及其功能性,无法满足现阶段使用者的使用需求,为使用者带来不便的问题。
14.2、本实用新型通过数字转换器可以有效地对数字化信息进行转化,并将其投至显示屏处,通过信号转换器便于使远端控制主机对电源控制模块进行控制,通过显示屏便于使用者对检测数值进行直观查看,通过大容量存储卡便于对检测信息进行实时存储,通过信息加密模块可以对信息进行安全加密,通过连接件的设置便于对安装块及其防护筒进行安装,通过动力组件可以有效地为机器人本体提供动力来源,通过加固板的设置便于提升固定块在安装后的稳固性。
附图说明
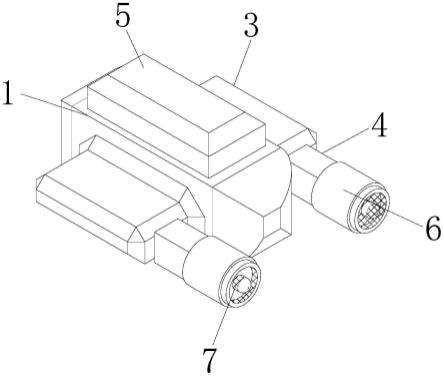
15.图1为本实用新型结构立体图;
16.图2为本实用新型结构仰视立体图;
17.图3为本实用新型结构系统原理图;
18.图4为本实用新型电源控制模块系统原理图。
19.图中:1、机器人本体;2、摄像头;3、连接件;4、安装块;5、控制盒;6、防护筒;7、动力组件;8、固定块;9、加固板。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1~4,本实用新型实施例中,一种用于水下检测的水下机器人包括机器人本体1和摄像头2,机器人本体1的输入端分别电性连接有震动传感器、电源控制模块和温
度传感器,温度传感器和震动传感器的输出端均电性连接有信息采集模块,信息采集模块的输出端电性连接有信息传输模块,信息传输模块的输出端分别电性连接有中央处理器和闪存模块,中央处理器的输出端分别电性连接有控制器和信号发射器,控制器的输出端电性连接有报警器,电源控制模块的内部包括电源状态指示器和漏电传感器。
22.通过本系统的设计可以有效地使机器人本体1在水下检测的过程中可以对自身所产生的震动值和实时的温度信息进行监测,同时监测的数值可以实时的发送至远端主机处,并通过中央处理器对信息的自动匹配,可以有效地实现自动化报警及远程的信息安全传输,有效地提升了机器人本体1在使用过程中的功能性及其安全性,同时解决了现有的用于水下检测的水下机器人普遍不具备远程自动报警功能,导致水下机器人在水下探测的过程中存在诸多的安全隐患,严重影响了装置在使用时的实用性及其功能性,无法满足现阶段使用者的使用需求,为使用者带来不便的问题。
23.在本实施例中,信号发射器的输出端电性连接有信号接收器,信号接收器的输出端电性连接有远端控制主机,远端控制主机的输出端分别电性连接有信号转换器和数字转换器。
24.通过数字转换器可以有效地对数字化信息进行转化,并将其投至显示屏处,通过信号转换器便于使远端控制主机对电源控制模块进行控制。
25.在本实施例中,数字转换器的输出端电性连接有显示屏,信号转换器的输出端与电源控制模块的输入端电性连接。
26.通过显示屏便于使用者对检测数值进行直观查看。
27.在本实施例中,闪存模块的输出端电性连接有大容量存储卡,大容量存储卡的输入端电性连接有信息加密模块。
28.通过大容量存储卡便于对检测信息进行实时存储,通过信息加密模块可以对信息进行安全加密。
29.在本实施例中,机器人本体1的两侧均固定安装有连接件3,连接件3的正面固定安装有安装块4,机器人本体1的顶部固定安装有控制盒5。
30.通过连接件3的设置便于对安装块4及其防护筒6进行安装。
31.在本实施例中,安装块4的正面固定安装有防护筒6,防护筒6的内腔设置有动力组件7。
32.通过动力组件7可以有效地为机器人本体1提供动力来源。
33.在本实施例中,机器人本体1底部的背面固定安装有固定块8,摄像头2位于固定块8背面的中间部位且与固定块8固定连接,固定块8的两侧且位于机器人本体1的底部固定安装有加固板9。
34.通过加固板9的设置便于提升固定块8在安装后的稳固性。
35.本实用新型的工作原理是:通过振动传感器和温度传感器对机器人本体1实时所产生的震动值和温度信息进行检测,通过信息采集模块对震动值和温度信息进行采集并通过信息传输模块传输至中央处理器处,通过中央处理器对信息进行处理匹配和转化后,通过信号发射器和信号接收器将信息传输至远端控制主机处,同时当匹配的信息超过安全的标准数值时,则中央处理器会自动向控制器下达指令并控制报警器进行报警,数字转换器可以对摄像头2所拍摄的画面进行信息转数字转化,并通过显示屏进行显示。
36.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1