一种双桨共轴矢量喷水推动无人船装置
:
1.本实用新型涉及无人船技术,尤其涉及一种双桨共轴矢量喷水推动无人船装置。
背景技术:
2.随着水资源的富营养化和污染,无人船也逐渐出现在大众的视野当中,能否贴近实际需求做到推陈出新,也是对无人船企业的挑战,所以当前研究热点在于如何推动无人船在水上自如且能够迅速的行走,以及如何检测水资源。目前喷水推动虽然是一个不错的选择,但是舰船航速较低时,喷水推进的效率会比螺旋桨低一些,同时增加了管路中水的重量,航行器的排水量增大,效率有所降低。“船舶喷水推进技术发展”一文中明确指出喷水推进装置进水口所损失的功率约占主机总功率的7%~9%,目前存在的双桨推动中双桨主要对称分布在两侧,这样会导致转向的时一侧的船桨会降速,会损失能量,降低效率。
技术实现要素:
3.本实用新型的目的是:提出一种双桨共轴矢量喷水推动无人船装置,该无人船装置运行效率更高,损耗较低。
4.为实现上述目的,本实用新型采用以下技术方案:
5.一种双桨共轴矢量喷水推动无人船装置,包括船身和双浆,其特征在于,所述双桨同轴设置在船身尾部,双桨与发动机的输出轴同轴按照前后顺序连接在一起,所述发动机安装在船身内,在双桨前方的船身底部开设有入水口,在船身尾部侧面开设有用于安装并提供活动范围的矢量出水口的开孔,双桨位于入水口和矢量出水口之间;
6.所述矢量出水口具有两节出水通道,包括首节出水通道和与之转动连接的末端出水通道,曲柄摇杆机构一方面连接末端出水通道,另一方面连接船身,曲柄摇杆机构能够带动矢量出水口的末端出水通道左右摇动;所述末端出水通道位于船身外侧;首节出水通道固定在船身尾部。
7.所述无人船装置还包括有摄像单元2、水源检测单元3和控制系统,水源检测单元3与船身1通过沉头螺钉相连,固定在船身1的中前部位,摄像单元2与船身1同样通过沉头螺钉相连;所述水源检测单元、摄像单元、发动机与控制系统连接。
8.所述曲柄摇杆机构包括舵机、曲柄、连杆和连架杆,舵机9和曲柄10相连,舵机通过沉头螺钉固定在船身后部,位于曲柄10上方;曲柄和连杆通过销连接,连架杆12与连杆11同样通过销固定,连架杆12直接固定在活动节出水口上;所述舵机与控制系统连接。
9.两节出水通道通过销转动连接,通过曲柄摇杆机构控制末端出水通道转动;首节出水通道一部分位于船身内,一部分位于船身外。
10.所述船身采用凯夫拉复合材料制成。
11.所述矢量出水口6的出水通道的管径为20-40mm,入水口8中心距离矢量出水口6的固定节的前端面的距离为15-25cm。
12.所述双浆具有两个船桨,船桨为三浆片结构构成,呈中心对称形式,所述矢量出水
口的轴线与双浆同轴线。
13.所述矢量出水口、双桨和曲柄摇杆机构整体外侧包裹有防水壳。
14.所述的发动机安装在船身内部,发动机通过轴与双桨的两个螺旋桨同轴相连。
15.所述矢量出水口具有方向性,能左右摇动,通过矢量出水口相连辅助调控无人船的行驶方向。
16.与现有技术相比较,本实用新型的有益效果是,
17.本实用新型无人船装置整体的喷水推进是通过共轴双桨喷水推进实现,和对称双体双桨叶喷水推进相比,其在转弯过程中,由于其中一个桨叶需要降速,会丧失推力,当使用单体共轴双桨矢量出水口方式时,在转弯时只需要调整矢量出水口的方向,双桨不需要降速,正常运转就可以调整方向。提高了效率,同时和目前单体单桨的无人船相比,在低速时,单桨无人船喷水推进效率比螺旋桨要低,但是本技术共轴双桨无人船同步转速会提高。
附图说明
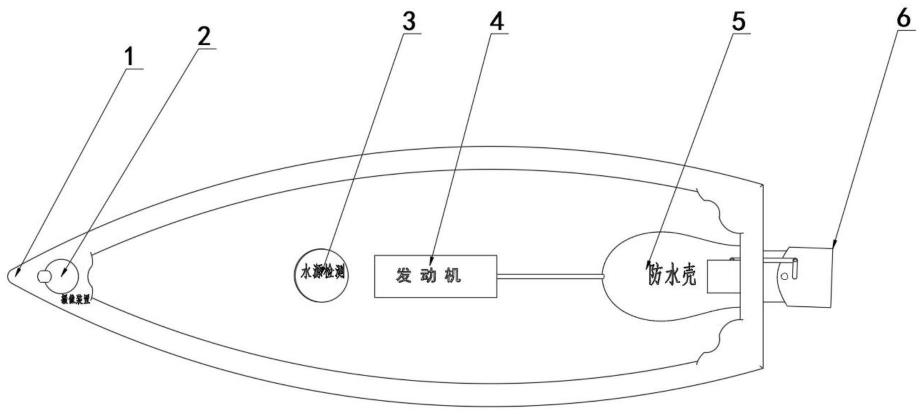
18.图1为本实用新型双桨共轴矢量喷水推动无人船装置的防水壳剖开的俯视结构示意图。
19.图2为发动机与船桨连接方式的结构示意图。
20.图3为本实用新型双桨共轴矢量喷水推动无人船装置的仰视结构示意图。
21.图4为一种曲柄摇杆机构(含舵机)安装的结构示意图。
22.图5为一种曲柄摇杆机构(不含舵机)的安装结构示意图。
23.图中,1:船身、2:摄像头单元、3:水源检测单元、4:发动机、5:防水壳、6:矢量出水口、7:双桨、8:入水口、9:舵机10:曲柄、11:连杆、12:连架杆。
具体实施方式
24.下面结合实施例及附图进一步解释本实用新型,但并不以此作为对本技术保护范围的限定。
25.本实用新型双桨共轴矢量喷水推动无人船装置,包括船身1和双浆7,所述双桨同轴设置在船身尾部,双桨与发动机的输出轴同轴按照前后顺序连接在一起,所述发动机安装在船身内,在双桨前方的船身底部开设有入水口8,在船身尾部侧面开设有用于安装并提供活动范围的矢量出水口6的开孔,双桨位于入水口和矢量出水口之间。
26.所述矢量出水口具有两节出水通道,两节出水通道通过销转动连接,通过曲柄摇杆机构控制外侧出水通道转动,曲柄摇杆机构能够带动矢量出水口的末端出水通道左右摇动;所述末端出水通道位于船身的外侧,首节出水通道利用螺栓与船身尾部相连,首节出水通道与末端出水通道利用销相连。首节出水通道一部分位于船身内,一部分位于船身外。
27.所述无人船装置还包括有摄像单元2、水源检测单元3,水源检测单元3与船身1通过沉头螺钉相连,固定在船身1的中前部位,摄像单元2与船身1同样通过沉头螺钉相连。
28.所述摄像单元2安装在船身前侧,用于识别障碍物,以免碰撞损坏船身;
29.所述水源检测单元3布置在船舱内,发动机4布置在水源检测单元3后部的船舱内,水源检测单元的检测端通过现有技术进行分析检测水资源,发动机是通过轴使船桨旋转起来,从而实现喷水推进的作用。
30.所述无人船装置的船身结构采用凯夫拉复合材料制成,重量轻且强度高。由发动机4提供动力,发动机与双桨7的两个船桨同心相连,同时通过矢量出水口6进行喷水推进,发动机4与两个船桨同轴心相连,能够保证两个船桨提供相同的转速,可以增大效率,同时通过矢量出水口6喷水推进。
31.在双桨前方的船身底部开入水口8,入水口与双桨距离较近,矢量出水口6的出水通道的管径为20-40mm,矢量出水口的两节出水通道一个为活动节,一个为固定节,固定节和活动节可以都位于船身外部,固定节要与船身固定,固定节与活动节通过销连接,通过曲柄摇杆机构控制转动,固定节与船身1固定在一起。入水口8中心距离矢量出水口6的固定节的前端面的距离为15-25cm。
32.发动机4通过轴穿过双浆的两个船桨带动喷水,船桨为三浆片结构构成,呈中心对称形式,所述矢量出水口的轴线与双浆同轴线,在船身尾部侧面的中下部位打一个孔,将首节出水通道利用螺钉和螺母与船尾连接固定,利用曲柄摇杆机构控制末端出水通道向左摇动(船往左转)或向右摇动(船往右转),从而在转弯过程中,可以避免停转双桨的桨叶的过程,提高了效率。
33.双桨7可为船身提供高效率的动能,双桨位于入水口和矢量出水口之间,入水口和矢量出水口之间二者中间距离短,使得进入船中的水少一些,减少了入水的重量,避免了低速状态下高损耗的问题,发动机4转动通过连轴带动双桨7转动,达到高效率吸水后再排水的效果,这避免了一些不必要的损耗。例如,当水源检测单元检测水质后投药时,需要相对慢一点的速度,但是利用单桨喷水推动效率会降低,甚至比螺旋桨还要低,而采用本技术这种双桨短道排水会减少损耗。
34.所述曲柄摇杆机构(参见图4和图5)包括舵机、曲柄、连杆和连架杆,舵机9和曲柄10相连,舵机通过沉头螺钉固定在船身后部,位于曲柄10上方,带动曲柄转动,曲柄和连杆通过销连接,连架杆12与连杆11同样通过销固定,连架杆12直接固定在活动节出水口上,当需要转弯,控制舵机转动带动曲柄转动,从而带动连杆和连架杆,使得末端出水通道可以达到转向的效果。
35.上述中的水源检测单元、摄像单元、发动机、舵机与船身自身的控制系统连接,此部分控制可依据现有技术实现。
36.本实用新型中所述曲柄摇杆机构也可通过其他的杆件连接形式实现,以能使末端出水管道左右摇动为准。
37.本实用新型改变现有无人船架构,区别于常见的双体对称喷水推动架构,采用单体双桨共轴矢量喷水布局结构,在转向过程中使得不降低船桨的转速,通过改变矢量出水口的方向进一步提高运行效率,降低损耗。在调整方向时只需要调整出水口的方向就可以实现高效率转向,适用于独立自主运动又兼有检测水资源装置的无人船。
38.本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1