一种中小型水域水面垃圾清理船
1.本实用新型涉及一种中小型水域水面垃圾清理船,属于水面清理设备技术领域。
背景技术:
2.河流、湖泊以及水上游乐场等一些区域的水面垃圾,会造成水污染,对人们生活各方面都会产生一些不良影响,因此,成为了我们现在不可忽略的大问题。因此,必须对这些垃圾进行清理。现有的水面大型打捞设备基本都是水面清理船,而依靠燃油昨晚动力的船舶会对水源、环境造成污染,因此,中小型水域主要还是以人工打捞的方式为主。人工打捞存在着许多方面的缺点,比如工作量大、对体力的要求较高、工作环境过差等,同时工作效率低。
技术实现要素:
3.本实用新型的目的在于提供一种中小型水域水面垃圾清理船,旨在改善现有水面垃圾人工打捞存在的工作强度大、工作效率低的弊端。
4.上述的目的通过以下的技术方案实现:
5.一种中小型水域水面垃圾清理船,包括船体、控制组件、垃圾收集结构、转向结构、动力组件,所述垃圾收集结构安装在船体一端,包括打捞单元和位于打捞单元后部的传送带,由打捞单元将垃圾送至传送带上,由传送带送入船体内;所述动力组件安装在船体的另一端,驱动船体运动,所述转向结构安装在船体上,连接动力组件,实现转向;所述控制组件连接垃圾收集结构、转向结构、动力组件的驱动电机。
6.进一步的,所述动力组件包括主电机,主电机输出连接齿轮箱,齿轮箱输出连接螺旋桨。
7.进一步的,所述船体位于垃圾收集结构的一端开设收集口,在收集口的两侧各设置一个打捞单元,所述打捞单元包括在收集口一侧船体上安装的延伸架,在延伸架的端部中间设置旋转拨轮,在延伸架顶部对应旋转拨轮轴处安装拨轮驱动电机,在两个打捞单元与收集口之间的两个延伸架上设置拨叉轮,在延伸架的一侧对应拨叉轮的位置设置拨叉轮驱动电机,拨叉轮对应传送带,将垃圾拨入传送带。
8.更进一步的,所述传送带为倾斜设置,位于拨叉轮的一端低于另一端,传送带另一端下方设置垃圾分列台,垃圾分列台的两侧分别设置一个垃圾储存箱,所述垃圾分列台为凸起台。
9.更进一步的,所述船体为对称式结构,在船体的两侧各设置一个下沉浮仓,两个垃圾储存箱分别位于两个下沉浮仓的上方,垃圾从传送带运送到垃圾分列台,而后通过高度落差使垃圾滑落到垃圾储存箱内。
10.更进一步的,中小型水域水面垃圾清理船还包括辅助收集装置,所述辅助收集装置包括传感器、摄像头和两只机械手臂,控制打捞单元的两个驱动电机分别驱动各自连接的旋转拨轮,以相反方向旋转将垃圾向拨叉轮聚拢,两只机械手臂分别安装在船体与延伸
架的连接处,控制组件接收传感器与摄像头的信息,控制两只机械手臂将未聚拢的垃圾向旋转拨轮聚拢,或直接夹取送入垃圾储存箱。
11.更进一步的,所述拨叉轮设置三组拨叉组,三组拨叉组以拨叉轮轴圆周均布,每组拨叉组由若干根间隔分布的拨杆组成,拨杆上设置或不设置软毛,拨叉组将收集的垃圾送离水面,加速将垃圾传递到传送带上,并可预防垃圾退回流出,软毛材料可以减小空气阻力,提高垃圾收集效率,平稳的收集垃圾。
12.进一步的,所述控制组件包括遥控电路和报警电路,由单片机作为核心控制器,所述遥控电路的接收器和遥控器为无线或有线通讯,通过遥控器对清理船进行近距离或远程遥控。
13.进一步的,所述转向结构包括推杆电机,推杆电机通过固定板安装在船体上,推杆电机的伸缩轴上通过固定销安装连接轴套,连接轴套上设置连杆,连杆连接转向板,转向板铰接安装在尾页上,尾页安装在船体上,控制组件控制转向结构的推杆运动,转化为转向杆的往复摆动,使船实现航向的改变。推杆电机在控制组件遥控电路的作用下,使推杆伸长一定长度时,转向板顺时针转动,产生右转向力,在配合主电机下齿轮箱作用的螺旋桨的不停旋转,在水面上可以实现船右转;当其处于缩回状态时,转向板反向转动,产生反向力,与上同理,即实现船左转。
14.进一步的,所述垃圾储存箱的底面和侧面设置若干漏孔,水面打捞的垃圾大多带有积水,在垃圾储存箱四周和底面穿孔,收集垃圾后,积水通过漏孔穿越缝隙,最终排出船外,从而使储存箱空间的利用率变大,垃圾打捞的效率变高。
15.本实用新型的有益效果:结构设计小巧灵活,传送带和对旋转拨轮打捞单元的精细垃圾收集以及摄像头机械臂的全面辅助收集装置,解决了中小型水域水面垃圾清理自动化,效率化的问题,同时结构设计全面精巧,具有一定的应用价值。
附图说明
16.附图1是本实用新型结构主视示意图;
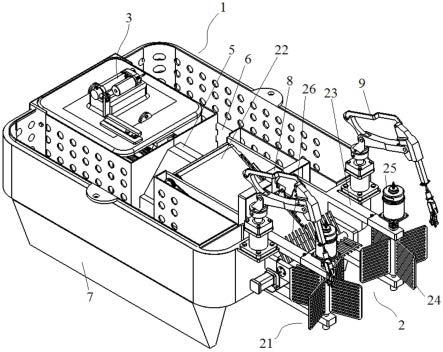
17.附图2是本实用新型立体结构示意图;
18.附图3是本实用新型转向结构示意图;
19.图中:1、船体,2、垃圾收集结构,21、打捞单元,22、传送带,23、延伸架,24、旋转拨轮,25、拨轮驱动电机,26、拨叉轮,3、转向结构,31、推杆电机,32、固定板,33、连接轴套,34、连杆,35、转向板,36、尾页,4、螺旋桨,5、垃圾分列台,6、垃圾储存箱,7、下沉浮仓,8、摄像头,9、机械手臂。
具体实施方式
20.下面结合附图对本实用新型做进一步说明。
21.如图1、2、3所示的中小型水域水面垃圾清理船,包括船体1、控制组件、垃圾收集结构2、转向结构3、动力组件,所述垃圾收集结构2安装在船体1一端,包括打捞单元21和位于打捞单元21后部的传送带22,由打捞单元21将垃圾送至传送带22上,由传送带22送入船体1内;所述动力组件安装在船体1的另一端,驱动船体运动,所述转向结构3安装在船体1上,连接动力组件,实现转向;所述控制组件连接垃圾收集结构2、转向结构3、动力组件的驱动电
机。
22.所述动力组件包括主电机,主电机输出连接齿轮箱,齿轮箱输出连接螺旋桨4。
23.所述船体1位于垃圾收集结构2的一端开设收集口,在收集口的两侧各设置一个打捞单元21,所述打捞单元21包括在收集口一侧船体上安装的延伸架23,在延伸架23的端部中间设置旋转拨轮24,在延伸架23顶部对应旋转拨轮轴处安装拨轮驱动电机25,在两个打捞单元21与收集口之间的两个延伸架23上设置拨叉轮26,在延伸架23的一侧对应拨叉轮26的位置设置拨叉轮驱动电机27,拨叉轮26对应传送带22,将垃圾拨入传送带22。
24.所述传送带22为倾斜设置,位于拨叉轮26的一端低于另一端,传送带22另一端下方设置垃圾分列台5,垃圾分列台5的两侧分别设置一个垃圾储存箱6,所述垃圾分列台5为凸起台。
25.所述船体1为对称式结构,在船体的两侧各设置一个下沉浮仓7,两个垃圾储存箱6分别位于两个下沉浮仓7的上方,垃圾从传送带22运送到垃圾分列台5,而后通过高度落差使垃圾滑落到垃圾储存箱6内。
26.船体1采用双体浮仓结构,船体中部设有垃圾分列台,两侧设置垃圾储存箱,这种双船体结构具有稳定性强的特点,有利于垃圾的平稳回收。
27.作为一种优选实施例,中小型水域水面垃圾清理船还包括辅助收集装置,所述辅助收集装置包括传感器、摄像头8和两只机械手臂9,控制打捞单元21的两个驱动电机分别驱动各自连接的旋转拨轮24,以相反方向旋转将垃圾向拨叉轮26聚拢,两只机械手臂9分别安装在船体1与延伸架23的连接处,控制组件接收传感器与摄像头8的信息,控制两只机械手臂9将未聚拢的垃圾向旋转拨轮聚拢,或直接夹取送入垃圾储存箱。
28.所述的传感器采集数据,比如采用深度摄像头图像采集系统和红外漫反射传感器,用来观察水面情况以及判断垃圾储存箱是否装满。
29.作为一种优选实施例,所述拨叉轮26设置三组拨叉组,三组拨叉组以拨叉轮轴圆周均布,每组拨叉组由若干根间隔分布的拨杆组成,拨杆上设置或不设置软毛,拨叉组将收集的垃圾送离水面,加速将垃圾传递到传送带上,并可预防垃圾退回流出,软毛材料可以减小空气阻力,提高垃圾收集效率,平稳的收集垃圾。
30.作为一种优选实施例,所述控制组件包括遥控电路和报警电路,由单片机作为核心控制器,所述遥控电路的接收器和遥控器为无线或有线通讯,通过遥控器对清理船进行近距离或远程遥控。通过终端实现对清理船的远程遥控、单片机为核心控制器、使用pwm驱动电机,使整个系统的运行状态可实时得到控制。控制组件针对各类信号线以及无线传输对清理船进行远程操控,其可以有效将整个操控模式独立于设备内部运行机构,通过接收器与遥控器关联,对不同机构进行信号驱动,这些现有技术可以直接在本船上使用。
31.船用转向结构有很多种,作为一种具体实施例,所述转向结构3包括推杆电机31,推杆电机31通过固定板32安装在船体1上,推杆电机31的伸缩轴上通过固定销安装连接轴套33,连接轴套33上设置连杆34,连杆34连接转向板35,转向板35铰接安装在尾页36上,尾页36安装在船体1上,控制组件控制转向结构的推杆运动,转化为转向杆的往复摆动,使船实现航向的改变。推杆电机在控制组件遥控电路的作用下,使推杆伸长一定长度时,转向板顺时针转动,产生右转向力,在配合主电机下齿轮箱作用的螺旋桨的不停旋转,在水面上可以实现船右转;当其处于缩回状态时,转向板反向转动,产生反向力,与上同理,即实现船左
转。
32.所述垃圾储存箱的底面和侧面设置若干漏孔,水面打捞的垃圾大多带有积水,在垃圾储存箱四周和底面穿孔,收集垃圾后,积水通过漏孔穿越缝隙,最终排出船外,从而使储存箱空间的利用率变大,垃圾打捞的效率变高。
33.本实用新型公开了一种新型中小型水域水面垃圾清理船,现有的水面垃圾清理船大多船体过大,主要应用于大型海域同时操作繁琐。从而中小型海域的清理现有的大型清理船难以应用,进而导致大多还应用传统人工打捞的方式。这款新型中小型水域水面垃圾清理船不但外型漂亮,体积小,主要是效率高,各种辅助结构运用合理巧妙,节省人力物力,也不受天气的限制,而且还适合于各类风景区、中小型湖泊的水面清理。本实用新型包括船体、控制组件、垃圾收集装置、辅助收集装置和驱动电机,所述船体采用双船体结构,船体中部设有垃圾倾卸台阶且两侧装有漏孔式垃圾储存箱,所述控制组件包括遥控辅助结构、转向结构、传感器系统和报警电路,进而通过终端实现对清理船的远程遥控、单片机为核心控制器、使用pwm驱动电机,使整个系统的运行状态可实时得到控制,所述垃圾收集装置包括传送带和对旋转拨轮的打捞单元,所述辅助收集装置包括三角拨轮、摄像头和两只机械手臂,所述驱动电机两个安装在打捞单元,一个与三角拨轮,一个与传送带相连接,主电机与转向结构相连同时连接齿轮箱控制螺旋桨旋转推进。本实用新型利用其智能化的特点对各种垃圾进行清理,效率甚至达到人工打捞的几十倍,适用于各种中小型水域的垃圾清理,应用市场大。
34.控制组件遥控辅助结构,针对各类信号线以及无线传输对清理船进行远程操控,其可以有效将整个操控模式独立于设备内部运行机构,通过接收器与遥控器关联,对不同机构进行信号驱动。所述的传感器系统,清理船核心控制模块是单片机,利用传感器采集数据,如采用深度摄像头图像采集系统和红外漫反射传感器,用来观察水面情况以及判断垃圾箱是否装满。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1