一种多功能分体式海洋垃圾处理船
1.本实用新型公开了一种多功能分体式海洋处理船,涉及到河流及海洋塑料垃圾收集、运输及分类设施。
背景技术:
2.随着世界科技水平的飞速增长,人民的物质文化生活也越来越丰富,但快速增长的生产力也伴随着日益严重的环境污染问题,其中,以微塑料污染和白色垃圾污染为代表的河流及海洋的垃圾污染问题越来越受到社会各界人士的重视。
3.然而目前关于海洋垃圾回收清理的工作仍处于低效,不系统,不彻底的状态。如2021年慕尼黑工业大学参与的seaclear项目,其展出的可收集水下垃圾的机器人组合系统虽然解决了自主收集海洋垃圾的功能,但由于其收集容量小,分类系统稳定性差,耗能高,仍存在效率过低,不能长时间工作的弊端。
4.现有的收集装置的垃圾收集仓集满后需到岸边进行倾倒,会造成大量不必要人力物力的浪费,还有可能会出现搁浅等问题,此外,由于现有垃圾收集设备均将软硬质塑料垃圾混合收集,从而会增加垃圾后续处理成本,降低塑料的二次利用率。
技术实现要素:
5.针对目前处理海洋塑料垃圾污染刻不容缓的现状和现有设备的局限性,本实用新型拟解决的技术问题是,提供一种多功能分体式海洋垃圾处理船,该处理船设置有垃圾分类、垃圾收集、垃圾水陆运输等多个功能,在一定程度上避免了传统水面塑料垃圾收集设备的位置和环境局限性,解决了垃圾收集数量少、效率低、分类困难等问题。
6.本实用新型解决所述技术问题采用的技术方案是:
7.一种多功能分体式海洋垃圾处理船,其特征在于,包括:
8.用于投放副船和运输垃圾的主船;
9.至少一个用于收集软质垃圾的副船;
10.至少一个用于收集硬质垃圾的副船。
11.所述主船的船身设置有多个副船安置舱(8)和多个存储不同种类垃圾的垃圾储存模块,
12.两种功能的副船安装在主船上相应的副船安置舱内,通过多连杆对接模块投放副船并辅助副船完成垃圾倾倒工作。
13.所述副船的侧面均采用铁制材料制成,所述多连杆对接模块(5)固定在主船的船身(1)上,在主船的驾驶舱(6)后,两侧各一个;多连杆对接模块包括丝杆步进电机(18)、曲柄步进电机(19)、导轨(20)、丝杆(21)、滑块导槽(22)、电磁杆(23)、电磁铁(24)、曲柄(25)、上摇杆(26)、下摇杆(27)、辅助杆(28);所述滑块导槽上设置有沿长度方向的用于丝杆穿过的通孔,滑块导槽的外侧面沿长度方向设置有导槽,安装时丝杆穿过滑块导槽的通孔,导槽朝向主船内部方向,滑块导槽的上下表面与导轨直接接触,滑块导槽在导轨内前后运动;
14.所述下摇杆的一端通过小滑块与滑块导槽的导槽滑动连接,下摇杆能在导槽中前后运动,所述丝杆步进电机与丝杠连接,滑块导槽固定在丝杠上,丝杠步进电机通过丝杠能驱动滑块导槽在导轨上运动,所述导轨的长度大于位于驾驶舱后面的船身的长度;曲柄步进电机的输出轴连接曲柄,曲柄的另一端与下摇杆的中部连接,所述下摇杆的另一端连接电磁杆的中部,电磁杆朝向主船内部的一侧安装有电磁铁,所述电磁杆的上端与上摇杆一端铰接,所述上摇杆的另一端与辅助杆的上端铰接,所述辅助杆的下端与连接小滑块的下摇杆的端点连接,在曲柄、上摇杆、下摇杆、辅助杆的共同作用下,带动电磁杆上下运动。
15.所述主船还包括船身(1)、能源模块(2)、水陆动力模块(4)、驾驶舱(6)、控制系统(7);
16.所述能源模块(2)为整个主船进行供电;
17.所述垃圾储存模块(3)用于对海洋塑料垃圾进行储存;
18.所述水陆动力模块(4)用于主船的水路和陆路行驶;
19.所述驾驶舱(6)用于人工控制主船前进方向和动力输出;
20.所述控制系统(7)用于控制多连杆对接模块完成包括投放、回收、垃圾倾倒在内的对接工作。
21.所述用于收集软质垃圾的副船中的垃圾分类模块(10)包括排针滚筒(32)、滚筒直流电机(34)、锥齿轮(35)、卧式轴承支座(36)、犁形刮刀(37),两个排针滚筒(32)固定在收集筐(39)前,犁形刮刀沿收集筐的高度方向焊接在收集筐前方的两侧,且在收集筐的边缘和排针滚筒轴之间,犁形刮刀中的每一片刀刃与排针滚筒的排针相互交错;所述排针滚筒的上下轴端分别通过卧式轴承支座固定;所述滚筒直流电机的输出轴连接有一个锥齿轮,在排针滚筒的上端轴上安装有另一锥齿轮,两个锥齿轮相互啮合,用于将滚筒直流电机的扭矩传递至排针滚筒;卧式轴承支座放置在排针滚筒两侧,用于固定排针滚筒;
22.收集软质塑料垃圾时,通过旋转带动垃圾向收集筐(39)内运动,犁形刮刀(37)位于排针滚筒旋出的一侧,能将软质塑料垃圾留在收集筐内,防止被排针滚筒带出。
23.所述用于收集硬质垃圾的副船中的垃圾分类模块(10)包括三刀排水桨、滚筒直流电机(34)、锥齿轮(35)、卧式轴承支座(36)、犁形刮刀(37);两个三刀排水桨固定在收集筐(39)前,并通过锥齿轮与滚筒直流电机传动。
24.两种副船均包括gps定位控制模块(9)、垃圾收集模块(11)、垃圾推出模块(12)、能源动力模块(13)、故障排除模块(14);
25.所述gps定位控制模块(9)用于判断主船与副船的相对位置,并控制副船到达工作区域和回到主船附近的对接位置;
26.所述垃圾收集模块(11)用于自动找寻塑料垃圾和将经过分类后通过垃圾收集口的垃圾暂存在副船中;
27.所述能源动力模块(13)用于为副船的运行和工作提供电力;
28.所述故障排除模块(14)用于排除包括水草在内的障碍物对垃圾分类收集工作的阻碍。
29.所述垃圾收集模块(11),包括摄像头(38)、收集筐(39)和外部框架(40),摄像头(38)位于副船的前方,收集筐(39)位于副船中部,收集筐上方为外部框架(40);
30.所述垃圾推出模块(12),包括丝杆滑块装置(41)、丝杆滑块电机(42)和垃圾挡板
(43);丝杆滑块装置(41)位于收集筐(39)上方,丝杆滑块装置的滑块与垃圾挡板43的上部连接固定,初始时垃圾挡板位于收集筐内部后侧,当垃圾需要推出时,垃圾挡板向前移动;通过丝杆滑块电机(42)带动丝杆滑块装置(41)前后运动,完成垃圾的推出工作,推出垃圾再回到收集筐后方;
31.两个故障排除模块(14)以垃圾推出模块为中心对称布置,每个故障排除模块均包括水草刮刀直流电机(48)和水草刮刀装置(49),水草刮刀直流电机(48)安装在外部框架(40)上丝杆滑块电机(42)的两侧,水草刮刀装置(49)包括刀片和曲柄滑块机构,刀片位于收集筐(39)内部,刀片与曲柄滑块机构连接,曲柄滑块机构的曲柄与水草刮刀直流电机连接;
32.刀片位置为犁形刮刀外侧,排针滚筒旋入收集筐处,水草刮刀直流电机带动曲柄旋转,曲柄滑块机构的曲柄通过曲柄滑块机构的摇杆带动刀片在竖直方向进行切割运动;
33.所述水陆动力模块包括履带(16)和螺旋桨(17),在船身(1)的两侧下方安装有履带(16),用于在陆地上行驶,在船身(1)后方吃水线以下安装有螺旋桨(17),用于在水中行驶,二者相配合,能够完成主船的水陆两栖运动;
34.所述gps定位控制模块(9)包括gps模块(30)和蓝牙模块(31),通过gps模块(30)采集副船与主船的相对位置,通过串口发送至蓝牙模块(31),通过控制推进器(47),驱动副船到达工作区域和回到主船附近的对接位置;
35.所述能源动力模块(13),包括浮筒(44)、太阳能板(45)、蓄电池(46)、推进器(47),浮筒(44)置于收集筐(39)的两侧,为副船提供浮力;太阳能板(45)置于外部框架(40)上方;蓄电池(46)储存太阳能,并为副船的所有动作供电;两个推进器(47)分别固定于两个浮筒(44)中部下方,为副船的行驶提供动力。
36.所述电磁铁上下运动的下部极限位置与副船的侧面铁板中部位置对齐,电磁铁上下运动的上部极限位置为能使得副船的最下部高于主船的副船安置舱,使得副船能够自由进出主船。
37.与现有技术相比,本实用新型的有益效果是:
38.1)本实用新型处理船可以通过置换副船的不同结构的垃圾收集口,完成对软、硬质塑料垃圾的分类依次收集,避免了现有技术中垃圾混合收集后造成的后续清洁处理成本增加,提高了塑料的二次利用率。
39.2)本实用新型处理船中在主船和副船上均设有基于单片机的控制系统,并在主船上设置驾驶舱,视情况可由人工直接对主船和副船进行控制,这样的人工+自动的控制方式,能够将机械结构与自动控制相结合,很大程度上提高了其环境适应性,对于我国及世界日益严峻的海洋,河流及湖泊塑料垃圾污染有积极的作用,多功能分体式海洋垃圾处理船具有重要的研究意义和广阔的应用前景。
40.3)本实用新型处理船能够完成海洋塑料垃圾的分类-收集-运输一体化,可直接将海洋中的软质塑料垃圾和硬质塑料垃圾分别收集,并运输至陆地处理站,针对两种垃圾的特性进行不同的后续处理工作,减少了垃圾回收利用过程耗费的人力物力,提高了塑料的二次利用率,降低了垃圾绿色处理的成本。
41.4)本实用新型同时具备塑料垃圾的分类和水陆两栖运输两种功能。
附图说明
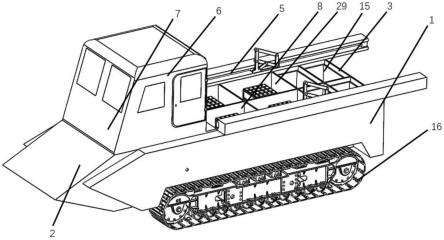
42.图1为本实用新型多功能分体式海洋垃圾处理船中主船的整体结构示意图;
43.图2为本实用新型中主船后视结构示意图;
44.图3为本实用新型中多连杆对接模块的结构示意图;
45.图4为本实用新型中副船主视结构示意图;
46.图5为本实用新型中副船的整体结构示意图;
47.图6为本实用新型中垃圾分类模块中的三刀排水桨的结构示意图。
48.图7为滑块导槽的立体结构示意图。
49.图8为故障排除模块局部视图。
50.图中,1船身、2能源模块、3垃圾储存模块、4水陆动力模块、5多连杆对接模块、6驾驶舱、7控制系统、8副船安置舱、9gps定位控制模块、10垃圾分类模块、11垃圾收集模块、12垃圾推出模块、13能源动力模块、14故障排除模块、15垃圾桶、16履带、17螺旋桨、18丝杆步进电机、19曲柄步进电机、20导轨、21丝杆、22滑块导槽、23电磁杆、24电磁铁、25曲柄、26上摇杆、27下摇杆、28辅助杆、29舱格、30gps模块、31蓝牙模块、32排针滚筒、33三刀排水桨、34滚筒直流电机、35锥齿轮、36卧式轴承支座、37犁形刮刀、38摄像头、39收集筐、40外部框架、41丝杆滑快装置、42丝杆滑块电机、43垃圾挡板、44浮筒、45太阳能板、46蓄电池、47推进器、48水草刮刀直流电机、49水草刮刀装置。
具体实施方式
51.下面结合附图进一步解释本实用新型,但并不以此作为对本技术保护范围的限定。
52.一种多功能分体式海洋垃圾处理船,其特征在于,该处理船可通过人工+自动的控制方式,通过主船与多个副船配合作业的工作形式,完成海洋塑料垃圾的软、硬质分类、定向收集和水陆运输工作;包括:
53.用于投放副船和运输垃圾的主船;
54.用于收集软质垃圾的副船;
55.用于收集硬质垃圾的副船;
56.两种功能的副船安装在主船上相应的副船安置舱内,通过多连杆对接模块投放副船并辅助副船完成垃圾倾倒工作。
57.所述主船包括船身(1)、能源模块(2)、垃圾储存模块(3)、水陆动力模块(4)、多连杆对接模块(5)、驾驶舱(6)、控制系统(7)、副船安置舱(8);
58.所述能源模块(2)为整个主船进行供电;
59.所述垃圾储存模块(3)用于对海洋塑料垃圾进行储存;
60.所述水陆动力模块(4)用于主船的水路和陆路行驶,具有水陆两栖运输功能;
61.所述多连杆对接模块(5)用于副船的投放、回收以及辅助副船进行垃圾倾倒工作;
62.所述驾驶舱(6)用于人工控制主船前进方向和动力输出;
63.所述控制系统(7)用于控制多连杆对接模块完成投放、回收等对接工作。
64.所述副船包括gps定位控制模块(9)、垃圾分类模块(10)、垃圾收集模块(11)、垃圾推出模块(12)、能源动力模块(13)、故障排除模块(14);
65.所述gps定位控制模块(9)用于判断主船与副船的相对位置,并控制副船到达工作区域和回到主船附近的对接位置;
66.所述垃圾分类模块(10)通过置换不同结构的垃圾收集口,完成对不同物理性质垃圾的分类依次收集;
67.所述垃圾收集模块(11)用于自动找寻塑料垃圾和将经过分类后通过垃圾收集口的垃圾暂存在副船中;
68.所述能源动力模块(13)用于为副船的运行和工作提供电力;
69.所述故障排除模块(14)用于排除水草等障碍物对垃圾分类收集工作的阻碍。
70.所述多连杆对接模块(5)固定在主船的船身(1)上,在主船的驾驶舱(6)后,两侧各一个,该多连杆对接模块包括丝杆步进电机(18)、曲柄步进电机(19)、导轨(20)、丝杆(21)、滑块导槽(22)、电磁杆(23)、电磁铁(24)、曲柄(25)、上摇杆(26)、下摇杆(27)、辅助杆(28);所述滑块导槽上设置有沿长度方向的用于丝杆穿过的通孔,滑块导槽的外侧面沿长度方向设置有导槽,安装时丝杆穿过滑块导槽的通孔,导槽朝向主船内部方向,滑块导槽22的上下表面与导轨20直接接触,滑块导槽在导轨内前后运动。所述下摇杆27的一端通过小滑块与滑块导槽的导槽滑动连接,下摇杆能在导槽中前后运动,带动下摇杆产生水平方向的位移,再经过曲柄滑块机构,使电磁杆产生纵向的位移。
71.所述丝杆步进电机18与丝杠21连接,滑块导槽固定在丝杠21上,丝杠步进电机通过丝杠能驱动滑块导槽22在导轨20上运动,所述导轨的长度大于位于驾驶舱后面的船身的长度;曲柄步进电机19的输出轴连接曲柄25,曲柄25的另一端与下摇杆27的中部连接,所述下摇杆27的另一端连接电磁杆23的中部,电磁杆23朝向主船内部的一侧安装有电磁铁24,所述电磁杆23的上端与上摇杆26一端铰接,所述上摇杆26的另一端与辅助杆28的上端铰接,所述辅助杆的下端与连接小滑块的下摇杆的端点连接,在曲柄25、上摇杆、下摇杆、辅助杆的共同作用下,带动电磁杆23上下运动。
72.所述电磁铁上下运动的下部极限位置与副船的侧面铁板中部位置对齐,电磁铁上下运动的上部极限位置为能使得副船的最下部高于主船副船安置舱,使得副船能够自由进出主船,而不发生干涉。
73.所述垃圾储存模块(3)即为四个设置在主船的船身(1)后方的垃圾桶(15),将副船排出的不同种类的垃圾分开进行储存,在主船上岸后进行倾倒;
74.所述水陆动力模块包括履带(16)和螺旋桨(17),在船身(1)的两侧下方安装有履带(16),用于在陆地上行驶,在船身(1)后方吃水线以下安装有螺旋桨(17),用于在水中行驶,二者相配合,能够完成主船的水陆两栖运动;
75.所述副船安置舱(8)位于驾驶舱(6)后,垃圾储存模块(3)前,设置4个舱格(29),用于存放不同功能的副船,由多连杆对接模块(5)依次投放在工作水域中,并在副船完成工作后由多连杆对接模块(5)放回副船安置舱中。
76.所述垃圾收集模块(11),包括摄像头(38)、收集筐(39)和外部框架(40),摄像头(38)位于副船的前方,收集筐(39)位于副船中部,收集筐上方为外部框架(40)。该垃圾收集模块为副船的主体部分,能够为副船的运动提供方向,并对收集到的垃圾进行暂存。
77.所述gps定位控制模块(9)包括gps模块(30)和蓝牙模块(31),通过gps模块(30)采集副船与主船的相对位置,通过串口发送至蓝牙模块(31),通过控制推进器(47),驱动副船
到达工作区域和回到主船附近的对接位置。
78.所述垃圾分类模块(10)分为两种,一种用于收集软质塑料垃圾(如塑料袋)包括排针滚筒(32)、滚筒直流电机(34)、锥齿轮(35)、卧式轴承支座(36)、犁形刮刀(37),犁形刮刀沿收集筐的高度方向焊接在收集筐前方的两侧,且在收集筐的边缘和排针滚筒轴之间,犁形刮刀中的每一片刀刃与排针滚筒的排针相互交错。所述排针滚筒的上下轴端分别通过卧式轴承支座36固定;所述滚筒直流电机34的输出轴连接有一个锥齿轮,在排针滚筒的上端轴上安装有另一锥齿轮,两个锥齿轮相互啮合,用于将滚筒直流电机的扭矩传递至排针滚筒;卧式轴承支座放置在排针滚筒两侧,用于固定排针滚筒。收集软质塑料垃圾时,两个排针滚筒(32)固定在收集筐(39)前,通过旋转带动垃圾向收集筐(39)内运动,犁形刮刀(37)位于排针滚筒旋出的一侧,能将软质塑料垃圾留在收集筐内,防止被排针滚筒带出。
79.另一种用于收集硬质塑料垃圾,包括或三刀排水桨(33)、滚筒直流电机(34)、锥齿轮(35)、卧式轴承支座(36)、犁形刮刀(37),各部件的安装方式与用于收集软质塑料垃圾的垃圾分类模块一样,仅用三刀排水桨替换排针滚筒的位置,能正常运行收集即可。
80.收集软质塑料垃圾时,使用配备排针滚筒的副船;收集硬质塑料垃圾(如塑料水瓶)时,使用配备三刀排水桨的副船。若两种垃圾同时存在,则先投放配备排针滚筒的副船,对所在区域的软质垃圾进行收集,再投放配备三刀排水桨的副船,对所在区域的硬质垃圾进行收集,配备排针滚筒的副船可以收集软质塑料垃圾,同时还可以收集体积在1立方厘米以内的垃圾。
81.所述垃圾推出模块(12),包括丝杆滑块装置(41)、丝杆滑块电机(42)和垃圾挡板(43);丝杆滑块装置(41)位于收集筐(39)上方,通过丝杆滑块电机(42)带动丝杆滑块装置(41)前后运动,完成垃圾的推出工作。进行垃圾推出工作时,收集筐不移动,丝杆滑块装置的滑块与垃圾挡板43的上部连接固定,初始时垃圾挡板位于收集筐内部后侧,当垃圾需要推出时,垃圾挡板向前移动,丝杠滑块电机带动滑块继而带动垃圾挡板在收集筐中前后移动,推出垃圾再回到收集筐后方。
82.两个故障排除模块(14)(参见图8)以垃圾推出模块12为中心对称布置,每个故障排除模块均包括水草刮刀直流电机(48)和水草刮刀装置(49),水草刮刀直流电机(48)安装在外部框架(40)上丝杆滑块电机(42)的两侧,水草刮刀装置(49)包括刀片和曲柄滑块机构,刀片位于收集筐(39)内部,刀片与曲柄滑块机构连接,曲柄滑块机构的曲柄与水草刮刀直流电机连接。水草刮刀直流电机带动曲柄旋转,曲柄通过摇杆带动刀片在竖直方向进行切割运动。其中,刀片在收集筐内进行运动,刀片位置为犁形刮刀外侧,排针滚筒旋入收集筐处。
83.当水草等异物缠绕在排针滚筒(32)上时,可通过水草刮刀直流电机(48)控制水草刮刀装置(49)中的刀片上下运动,将异物进行清除,保证垃圾分类收集工作正常进行,当异物缠绕在排针滚筒上,导致排针滚筒无法正常旋转时,排针滚筒停转,水草刮刀装置的刀片部分从收集筐上部到收集筐下部进行竖直切割运动,将卡在排针滚筒的排针上的异物切下。
84.上述的滚筒直流电机、丝杠滑块电机、水草刮刀直流电机(48)均固定在外部框架40的内部。
85.所述能源动力模块(13),包括浮筒(44)、太阳能板(45)、蓄电池(46)、推进器(47),
浮筒(44)置于收集筐(39)的两侧,为副船提供浮力;太阳能板(45)置于外部框架(40)上方,吸收太阳能;蓄电池(46)储存太阳能,并为副船的所有动作供电;两个推进器(47)分别固定于两个浮筒(44)中部下方,为副船的行驶提供动力。
86.一种多功能分体式海洋垃圾处理船的工作过程分为五步,即主船在指定工作区域释放副船、副船收集软质塑料垃圾、副船收集硬质塑料垃圾、主船与副船对接倾倒两种垃圾、主船将垃圾从水面运输至陆地,优选具体工作过程如下:
87.第一步,主船在指定工作区域释放副船。主船在进入水面前得到垃圾较多区域的位置信息,通过履带驱动行驶至水面,再通过螺旋桨驱动,携带副船进入垃圾密集区域,通过主船的多连杆对接模块,在释放副船后,主船在原地等候,准备接收副船倾倒的垃圾。
88.第二步,副船收集软质塑料垃圾。副船通过主船的多连杆对接模块投入海洋中的工作区域后,首先应用副船的垃圾收集模块找寻垃圾位置;然后应用能源动力模块带动副船移动至垃圾附近,并将收集筐的收集口朝向垃圾;最后应用垃圾分类模块的排针滚筒,将软质塑料垃圾卷入收集筐,并应用推进器移动至下一工作位置。
89.第三步,副船收集硬质塑料垃圾。待垃圾收集模块判断该区域内的软质塑料垃圾已全部完成收集后,即可开始收集硬质塑料垃圾,其收集流程为:首先应用副船的垃圾收集模块找寻垃圾位置;然后应用能源动力模块带动副船移动至垃圾附近,并将收集筐的收集口朝向垃圾;最后应用垃圾分类模块的三刀排水桨,将硬质塑料垃圾卷入收集筐,并应用推进器移动至下一工作位置。
90.第四步,主船与副船对接倾倒两种垃圾。待两种副船依次收集好两种垃圾后,通过副船的gps定位控制模块,回到主船接收处,配合主船的多连杆对接模块,进行垃圾的倾倒工作,将两种垃圾分别倾倒至两个垃圾桶中,倾倒完成后,主船将副船继续放入水中工作。具体对接过程为:在主船需要投放副船时,控制丝杆步进电机,将滑块导槽的位置调至存放在副船安置舱中的副船上方,控制曲柄步进电机,将电磁杆上的电磁铁下放至副船(副船两侧均为铁板,吸力足够,能够保证吸附后的对接工作正常进行)侧面,启动电磁铁,将副船吸附至电磁杆上,再启动曲柄步进电机,带动副船升至副船安置舱上方,再启动丝杆步进电机,带动副船离开主船船身,控制曲柄步进电机,将副船投入水中,电磁铁关闭;在主船需要回收副船时,控制丝杆步进电机,将滑块导槽的位置调至水面上等候的副船的上方,控制曲柄步进电机,将电磁杆的电磁铁下放至副船侧面,启动电磁铁,将副船吸附至电磁铁上,再启动曲柄步进电机,带动副船升至水面上,再启动丝杆步进电机,带动副船回到副船安置舱的上方,控制曲柄步进电机,将副船放回副船安置舱中,电磁铁关闭。在主船需要辅助副船进行垃圾倾倒工作时,控制丝杆步进电机,将滑块导槽的位置调至水面上等候的副船的上方,控制曲柄步进电机,将电磁杆的电磁铁下放至副船侧面,启动电磁铁,将副船吸附至电磁铁上,再启动曲柄步进电机,带动副船升至水面上,再启动丝杆步进电机,带动副船到副船安置舱的上方,待副船将收集筐中的垃圾推出后,再放回水中继续工作。
91.第五步,主船将垃圾从水面运输至陆地。待主船的驾驶舱中的驾驶人员观察到垃圾桶已不能接收下一次的垃圾倾倒工作后,主船向副船发送信号后,由驾驶人员开动主船通过海路进入陆路,将垃圾倾倒至岸边后,返回继续第四步所述的对接工作,接收副船下一次倾倒的垃圾。
92.本技术中所述前后、左右等为相对位置,以主船驾驶舱所在一侧为前,以船尾为
后。
93.本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1