发动机控制的动态主动控制系统的制作方法
本公开一般涉及一种发动机控制的稳定性控制系统,用于提供最佳性能并控制船舶、舰艇或船只(为简洁起见,统称为船舶)的动态主动运动。更具体地,本公开涉及一种改进的动态主动控制系统(dacs),其被配置为接收来自多个传感器的数据输出并控制致动器的部署,以使船舶以期望的俯仰、侧倾和横摆轴控制进行操作。
背景技术:
1、以下术语和相关定义用于海洋稳定行业。“配平(trim)控制”是指在1秒或更长时间上平均的船舶的横向或俯仰(pitch)的平均角度的控制。“横倾控制”或“侧倾(roll)控制”是指在1秒或更长时间上平均的船舶的纵向或侧倾轴的平均角度的控制。“横摆(yaw)控制”是指对在1秒或更长时间上平均的船舶的横摆轴的平均角度的控制。“水接合装置(water engagement device)”或“wed”是指一种机械或机电装置,其被配置为,当船舶沿某个(或向前)方向行驶时,通过选择性地将该装置与船舶横梁(transom)表面下方或附近的水流接合或进入,或通过在船舶沿向前方向操作期间改变该装置相对于水流的攻角来生成船舶的抬起变量。在本文公开的系统中,wed也可以被称为控制器,对控制器和/或wed的任何引用都意味着相同的装置。wed德尔塔位置定义为左舷和右舷wed部署之间的差异。“部署(deployment)”是指wed与水流的选择性接合或进入,或改变wed攻角。船舶的侧倾力矩是施加在船舶上的力的结果,该力使船舶绕其纵向或侧倾轴旋转。船舶的俯仰力矩是施加在船舶上的力的结果,该力使船舶绕其横向或俯仰轴旋转。船舶的横摆力矩是施加在船舶上的力的结果,该力使船舶绕其垂直或横摆轴旋转。例如,(1)如果左舷和右舷wed在船舶中不对称部署,则可能会产生“侧倾力矩”,这可能会导致船舶侧倾;(2)当左舷和右舷wed不对称部署时,可能会产生“横摆力矩”,这可能会导致航向变化;和(3)如果左舷和右舷wed对称部署,或者如果单个wed部署在船舶中心附近,则可能会产生“俯仰力矩”,这可能导致船舶俯仰。
2、船舶前向方向行驶时的常规海上稳定技术包括按比例部署wed,以在船舶横梁处产生连续抬升,用于配平控制,同时允许调整船舶的角度(例如,沿侧倾、俯仰和横摆轴)。商业上可买到的wed的几个例子(无论如何都不被认为是详尽的)是拦截器、配平片、翅片和其他类似的装置,它们可以以类似的方式接合水流并提供类似的功能。
3、船舶不在航行时的另一种海洋稳定技术是陀螺稳定系统,在一种商用版本中,该系统产生与进动率和角动量成比例的扭矩。在这样的陀螺稳定系统中,根据旋转轴的取向及其进动角向一个或多个轴施加扭矩。施加到侧倾、俯仰和/或横摆轴的扭矩量可以根据角动量、进动率、进动角和控制力矩陀螺仪的进动方向来计算。本文公开的系统使得能够计算发动机转向角变化(或方向舵位置的变化),该变化将抵消来自控制力矩陀螺稳定系统的绕横摆轴施加的扭矩。
4、海洋稳定技术是体验在水面上巡航的乐趣的关键,而不会伴随着船只的随机环境干扰。这些干扰(例如,突然的意外侧倾)对船夫来说可能是令人讨厌和破坏性的。在现有技术的系统中,wed被设计和配置为控制倾斜和配平,以使船舶在侧倾和俯仰轴上达到平均角度。娱乐市场中使用的小型船舶通常具有手动驱动的wed,而商业空间中操作的大型船舶使用自动驱动的wed来稳定运动。然而,这种现有技术的系统没有将dacs与发动机控制相结合以实现完全的船舶稳定。
5、此外,目前还没有现有技术的娱乐或商业稳定性控制系统将wed的快速部署与发动机配平调节和发动机转向角调节相结合。更具体地说,现有技术的系统缺乏wed的快速部署与船用船舶的发动机转向角的调节的结合,以抵消由于不对称部署、陀螺稳定横摆力矩和/或用于俯仰轴上的动态控制的发动机配平调节而引起的阻力变化。
6、鉴于现有技术系统在船舶稳定相关领域的上述缺点,市场显然需要一种改进的船舶稳定性控制系统,即,一种动态主动控制系统(dacs),其被配置为同时控制船舶的侧倾、俯仰和横摆轴上的加速度、速率和角度,以及船舶的发动机配平和发动机转向角调整。本文公开的dacs提供了优于传统系统的显著技术优势,同时克服了现有技术系统的缺点,如下所述。
技术实现思路
1、本公开涉及一种dacs,该dacs配置用于通过wed的快速部署和致动,同时控制所有三个轴上的船舶运动,即俯仰、侧倾和横摆。dacs配置有专有的惯性传感硬件和软件,以学习、捕获以及确定和/或预测全部三个轴上的船舶的各种运动,并且命令致动器叶片的部署,以抵消船舶的任何俯仰、侧倾和横摆运动,以及通过wed(在本文公开的系统中可替代地称为控制器)的快速对称部署与发动机配平调整相结合促进的总的船舶俯仰轴总控制。
2、在一个实施例中,dacs被配置为通过差异部署wed以抵消侧倾运动,同时调整发动机转向(或舵)位置以抵消与差异部署的wed相关的转向力矩,来提供总的船舶侧倾轴和航向控制。在替代实施例中,wed在本文中可被称为控制器,和/或在本文公开的dacs,反之亦然。本文公开的新型dacs可以(1)通过wed的快速对称部署,结合发动机配平调整,同时控制所有三个轴上的运动(总的船舶俯仰轴控制);(2)通过差异部署wed以抵消侧倾运动,同时调整发动机转向位置以抵消与wed德尔塔位置相关的转向力矩,来提供总的侧倾和航向控制;以及(3)调节发动机转向角以抵消由陀螺稳定系统产生的横摆力矩。如本文所公开的,总的俯仰轴控制策略包括以100mm/s或更快的部署速度对称部署多个水接合装置,同时调节发动机配平致动器。类似地,总的侧倾和航向控制策略包括以100mm/s或更快的部署速度差异部署多个水接合装置以抵消测量的侧倾运动,同时调节转向致动器以抵消由差异部署引起的测量的横摆运动,并且调节转向致动器以抵消由适于安装在船舶内的陀螺稳定装置产生的测量的横摆运动。
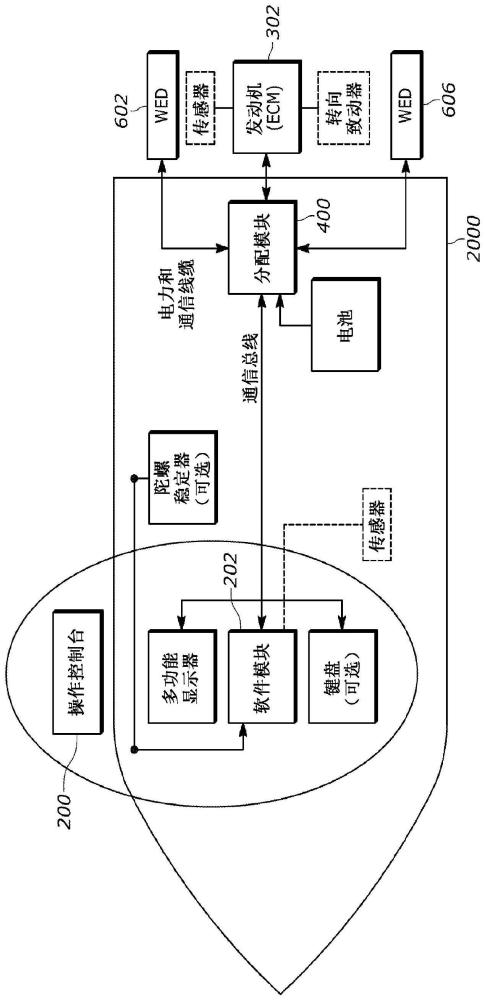
3、在另一个实施例中,dacs可自动调节发动机转向角,以抵消来自水接合装置德尔塔位置带来的阻力矩。dacs包括位于操作控制台内的基于嵌入式微处理器的软件模块,该软件模块通信地并可操作地连接到船舶的发动机(通过发动机控制模块)。软件内模块可以配置为与第三方系统(如导航系统)连接,以连接和交换数据和信息。至少一个数字连接到软件模块的水接合装置致动器,该水接合装置被配置为读取从软件模块输入的信号,并自动产生水接合装置德尔塔位置变化,以抵消由转向位置变化引起的侧倾运动。
4、如下文进一步详细解释的,dacs包括发动机,该发动机具有通信地且可操作地连接到软件模块的嵌入式发动机控制模块。多个水接合装置致动器适于安装在船舶的横梁上并且通信地且可操作地连接到软件模块。在船舶的操作期间,软件模块还被配置为发送信号,以便命令期望的水接合装置德尔塔位置并对抗船舶的动态运动。此外,软件模块还被配置为测量发动机转向角度和水接合装置德尔塔位置之间的关系,并向水接合装置致动器提供信号输出。具体地,软件模块向多个水接合装置致动器提供第一信号输出,以命令水接合装置德尔塔位置,以便对抗船舶的动态运动。此外,软件模块测量发动机转向角度和水接合装置德尔塔位置之间的关系,并且响应于此,向多个水接合装置致动器提供第二信号输出。在接收到第二信号时,多个水接合装置致动器响应于第二信号,自动产生水接合装置德尔塔位置的变化,以抵消由转向位置变化引起的侧倾运动。
5、软件模块嵌入有基于微处理器的控制系统,软件模块还通信地且可操作地连接到多个传感器。在另一个实施例中,多个传感器可以集成(嵌入)在软件模块内。在系统内还提供陀螺稳定装置,该陀螺稳定装置适于设置在船上并且通信地且可操作地连接到软件模块。在船舶的操作期间,控制系统通过惯性传感器测量船舶的运动并向转向致动器提供信号输出以(a)响应于惯性传感器测量的横摆轴运动,以及(b)基于分别对由陀螺稳定装置产生的横摆力矩和由控制系统命令的水接合装置德尔塔位置的的经验估计,自动调节转向位置,以便抵消转向位置传感器输出的测量的变化。
6、软件模块进一步连接到分配模块,分配模块被配置为用于布线安装的直通模块/装置,并为dacs的各种组件提供连接和分配点。软件模块进一步通信地耦合到(1)多个传感器(例如,位于船舶内的运动传感器);(2)一对致动器,其安装在横梁附近以部署和缩回wed;和(3)具有嵌入式发动机控制单元(ecu)的发动机(或推进单元),用于提供可调节的配平、高度和/或转向位置/方向控制;和/或(4)陀螺稳定装置。多个传感器包括以下中的至少一个:多轴惯性传感器,用于测量在船舶操作期间沿多个矢量轴产生的速率或加速度;加速度计传感器,用于分别测量船舶的纵向加速度、横向加速度和垂直加速度;侧倾率传感器(rrs)、俯仰率传感器(prs)和横摆率传感器(yrs),分别测量船舶的侧倾率、俯仰率和横摆率。此外,多个传感器中的至少一个传感器被配置为测量与wed/控制器缩回和部署相关的数据,并且在船舶操作期间测量和报告关于转向角、配平位置、发动机高度的数据。
7、软件模块可以进一步配置有专有的机器学习/人工智能算法,用于自动优化船舶操作特性,并且在操作者感觉到之前预测运动并立即响应于消除给船舶的操作者或乘客造成烦躁、干扰和不舒服的任何不期望的船舶运动。基于人工智能的系统被配置为了解船只在所有三个轴上的行为,并自动命令wed的部署和/或发动机配平、高度和/或转向的调整,以抵消船只的俯仰、侧倾和/或横摆,从而实现感知的稳定和受控操作。此外,本文公开的基于ai的系统可以对发动机转向位置进行任何必要的调整,以控制船舶的航向。
8、在船舶操作过程中,软件模块可能会接收到信号(关于wed德尔塔位置),决定需要采取什么行动,然后向致动器发送信号以采取该行动,例如,抵消侧倾运动,同时调整发动机转向位置,以抵消与wed德尔塔位置相关的转向力矩。如本文所公开的,经由位于整个船舶上的多个传感器(集成或通信地且可操作地耦合到软件模块)的系统能够经由数字通信总线从发动机接收转向位置,并计算在特定时间线上的转向位置的变化,将转向/方向舵位置的变化与侧倾角的变化相关联,并且由于该预测的侧倾角变化而自动调节wed德尔塔位置。
9、除了软件模块外,操作控制台还包括可选的多功能显示单元和/或操作输入设备(如键盘),这些组件通过数字通信总线相互通信地且可操作地连接。在另一个实施例中,操作控制台用作船舶操作者的控制台,并且可以支撑方向盘、控制杆或其他类似装置或转向机构——其他类型的轮子、操纵杆,以操纵船舶。通信地耦合到wed(或控制器)的软件模块还被配置为向ecu和致动器提供电力、通信和/或数据,用于wed的快速部署。
10、在另一个实施例中,dacs包括致动器,该致动器具有至少一个wed/控制器,其安装在船舶的横梁上,并数字地连接到软件模块。该系统能够通过测量发动机转向角和wed德尔塔位置之间的关系来确定期望的wed德尔塔位置,以对抗船舶的动态运动,并监测和读取与wed德尔塔塔位置相关的任何数据,作为船舶的横摆率、航向和侧倾角的即将发生的变化。具体而言,该系统可以(a)对发动机转向角进行必要的调整,以控制船舶的航向,并抵消由wed德尔塔位置引起的航向变化;以及(b)测量转向位置的变化,并预测由转向位置变化产生的最终侧倾运动,并自动创建wed/控制器德尔塔位置,以抵消将最终由转向位置改变引起的侧倾运动。
11、如详细披露中进一步描述的,dacs可配置为通过监测测得的横摆率和差异地部署wed,同时响应测得的横摆率调整这种部署以降低测得的横摆率,来提供总的船舶横摆轴控制,以对抗船舶在横摆轴上的动态运动。这里的系统接收操作者命令(期望的配平角度)并且可以(a)调整wed的平均位置以及发动机配平角度,以便实现操作者的期望配平角度;以及(b)调整发动机配平和wed平均位置之间的关系,以优化dacs系统的性能或船舶发动机的燃料效率。
12、dacs可配置为监测和读取与wed的差异部署相关的任何数据,作为船舶的横摆率、航向和侧倾率即将发生的变化。基于接收到的数据,该系统可以通过差异地部署wed以抵消侧倾轴力矩,同时调整发动机转向位置以抵消与差异控制器部署相关的转向力矩,来提供总的侧倾轴和航向控制。dacs还可以被配置为调节发动机转向角,以抵消陀螺稳定系统产生的横摆力矩。
13、某些实施例在附图中示出。然而,应当理解,本公开不限于附图中所示的布置和手段。
- 还没有人留言评论。精彩留言会获得点赞!