一种基于智能识别的吸附型水面清理机器人
1.本发明涉及水面清理设备技术领域,特别涉及一种基于智能识别的吸附型水面清理机器人。
背景技术:
2.在我国经济飞速发展的过程中,水资源的保护也逐渐成为当下研究热点。尤其是近年来旅游行业飞速发展,在许多的港口、河流、湖泊等水域,普遍存在着景区垃圾难以处理的问题,对于现有的水面垃圾的清理技术,目前基本采用的是人工驾驶机械船只、人工遥控垃圾收集装置这两大类方法进行打捞;
3.现今也有用一些智能水上航行机器进行打捞的尝试,一种水面漂浮垃圾收集机器人,该技术可以实现对水面死角垃圾的处理,但由于打捞原理人工过于复杂、制作成本过于高昂而难以得到推广和长期运用;
4.而人工驾驶机械船只进行打捞的方法虽然操作设备简单易得,但该方法有不少限制,在小型的河流、港口的死角处,经常会存在水面较窄或水深较浅的区域,搭载打捞人员的船只难以通过,导致打捞困难;
5.同时,在一些污染十分严重的水域,工作环境过于恶劣,并不适合由人前往打捞。一般来讲,对于需要及时打捞垃圾以维持美观的景观湖和河流,打捞大大地影响了景区环境的美观程度,不利于旅游行业的发展,而人工遥控式的垃圾收集装置,一种水面漂浮垃圾收集装置的,虽然这类装置与搭载打捞人员的船只相比体积较小,可以处理垃圾存在的死角区,但在水面这样复杂多变的环境中进行的定点打捞工作,人工遥控的效率过低;
6.综上,对水面垃圾的清理,不论是人工直接打捞,还是遥控打捞这两种现存的普遍使用的方式,不仅有清理难度较大、综合成本较高的问题,而且通常来讲无法高效地帮助解决在台风大雨季节频发的水葫芦等日益严重的地域性大型水域污染问题,针对以上情况,对景区河流等场所的水面垃圾清理、日益频发的水域富营养化导致的水草泛滥问题,为此,提出一种基于智能识别的吸附型水面清理机器人。
技术实现要素:
7.有鉴于此,本发明希望提供一种基于智能识别的吸附型水面清理机器人,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
8.本发明实施例的技术方案是这样实现的:一种基于智能识别的吸附型水面清理机器人,包括船体,所述船体的上表面分别安装有摄像头、扫描激光雷达、风速传感器、陀螺仪和加速度传感器,所述船体的内侧底壁安分别装有水泵、电机和plc控制器,所述水泵的进水口安装有吸附组件,所述电机的输出轴安装有传动机构,所述船体的下表面通过轴承转动连接有卷入漩涡机构,所述卷入漩涡机构的一端安装于所述传动机构的一侧,所述船体的下表面安装有杂物收集箱,所述杂物收集箱的内壁分别安装有红外线发送装置和红外线接收装置。
9.进一步优选的,所述传动机构包括第一皮带轮、第二皮带轮和皮带本体;
10.所述电机的输出轴贯穿于所述船体的内侧壁且安装于所述第二皮带轮的一侧,所述第二皮带轮和所述第一皮带轮的外壁贴合于所述皮带本体的内壁。
11.进一步优选的,所述卷入漩涡机构包括内叶、外叶和转轴;
12.所述船体的内壁通过轴承转动连接于所述转轴的一端,所述转轴的另一端贯穿于所述船体的内壁且安装于第一皮带轮的一侧,所述转轴的外壁分别均匀安装有内叶和外叶。
13.进一步优选的,所述吸附组件包括吸附管和吸头,所述水泵的出水口安装于所述吸附管的一端,所述吸附管的另一端贯穿于所述船体的内侧壁且安装于所述吸头的一侧。
14.进一步优选的,所述船体的后表面均匀安装有螺旋桨。
15.进一步优选的,所述船体的内侧底壁安装有内置箱,所述内置箱的内壁安装有蓄电池。
16.进一步优选的,所述船体的上表面安装有太阳能光伏发电板。
17.本发明实施例由于采用以上技术方案,其具有以下优点:
18.一、本发明具有长时间航行、高收集效率、低标准工作环境、广范围收集垃圾、纯电驱动、操控方便、小型美观、航行平稳、适应性广、省力高效等特点,极大的解决了现行人工打捞作业存在的问题,具有较好的实用价值和推广价值。
19.二、本发明通过当电机的输出轴第二皮带轮进行转动,第二皮带轮带动皮带本体和第一皮带轮进行转动,第一皮带轮带动转轴转动,转轴带动内叶和外叶转动,外叶主要提供动力,内叶主要辅助杂物收集箱收集杂物,当杂物收集箱中的垃圾收集到红外线发送装置和红外线接收装置高度时,红外线接收装置接收的信号产生变化,经放大与信号处理后进行信息反馈至plc控制器,当回馈信息超过30秒时,即可说明杂物收集箱内容量不足,plc控制器发出返航指令,智能一体化,能够有效的吸收漂浮垃圾和通过水流收集浅滩、石缝中不易收集的垃圾,深度清理水面垃圾。
20.三、本发明通过设置摄像头采用了双目视觉系统,既能保证系统的稳定性又能获得足够信息,可用于收集图像特征信息,将处理后的目标图像特征与期望图像特征进行比较,如果两者之间存在差值,plc控制器就会将差值转换成装置运动的值,这时plc控制器就会发出控制装置移动,在图像特征误差为零时视觉伺服系统任务结束,当船体难以正常驶出的地形时,可将信息传送到plc控制器,plc控制器分析后下达相应的倒退或转弯等命令实现自主脱困。
21.上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
附图说明
22.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
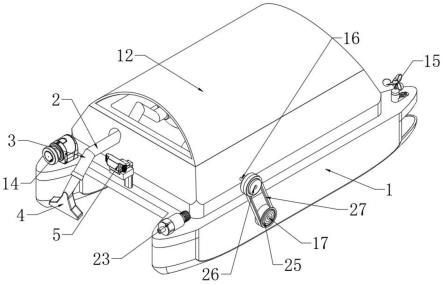
23.图1为本发明的结构图;
24.图2为本发明的仰视结构图;
25.图3为本发明的杂物收集箱内部结构图;
26.图4为本发明的内部结构图;
27.图5为本发明的加速度传感器结构图;
28.图6为本发明的吸附组件结构图;
29.图7为本发明的卷入漩涡机构结构图;
30.图8为本发明的陀螺仪结构图;
31.图9为本发明的plc控制器结构图。
32.附图标记:1、船体;2、吸附组件;3、吸附管;4、吸头;5、摄像头;6、水泵;7、卷入漩涡机构;8、内叶;9、外叶;10、转轴;11、螺旋桨;12、太阳能光伏发电板;13、杂物收集箱;14、扫描激光雷达;15、风速传感器;16、电机;17、传动机构;18、内置箱;19、蓄电池;20、红外线发送装置;21、红外线接收装置;22、陀螺仪;23、加速度传感器;24、plc控制器;25、第一皮带轮;26、第二皮带轮;27、皮带本体。
具体实施方式
33.在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
34.下面结合附图对本发明的实施例进行详细说明。
35.如图1-图9所示,本发明实施例提供了一种基于智能识别的吸附型水面清理机器人,包括船体1,船体1的上表面分别安装有摄像头5、扫描激光雷达14、风速传感器15、陀螺仪22和加速度传感器23,船体1的内侧底壁安分别装有水泵6、电机16和plc控制器24,水泵6的进水口安装有吸附组件2,电机16的输出轴安装有传动机构17,船体1的下表面通过轴承转动连接有卷入漩涡机构7,卷入漩涡机构7的一端安装于传动机构17的一侧,船体1的下表面安装有杂物收集箱13,杂物收集箱13的内壁分别安装有红外线发送装置20和红外线接收装置21。
36.在一个实施例中,传动机构17包括第一皮带轮25、第二皮带轮26和皮带本体27;
37.电机16的输出轴贯穿于船体1的内侧壁且安装于第二皮带轮26的一侧,第二皮带轮26和第一皮带轮25的外壁贴合于皮带本体27的内壁,通过启动电机16和传动机构17进行启动,电机16的输出轴带动第二皮带轮26进行转动,第二皮带轮26带动皮带本体27进行传动至第一皮带轮25上,第一皮带轮25带动转轴10进行转动。
38.在一个实施例中,卷入漩涡机构7包括内叶8、外叶9和转轴10;
39.船体1的内壁通过轴承转动连接于转轴10的一端,转轴10的另一端贯穿于船体1的内壁且安装于第一皮带轮25的一侧,转轴10的外壁分别均匀安装有内叶8和外叶9,通过转轴10分别带动内叶8和外叶9进行转动,外叶9用亚克力板来用作排水动力系统,内叶8采用网状结构来收集水面垃圾,进而将水面上的垃圾卷入船体1尾部的可装卸的杂物收集箱13。
40.在一个实施例中,吸附组件2包括吸附管3和吸头4,水泵6的出水口安装于吸附管3的一端,吸附管3的另一端贯穿于船体1的内侧壁且安装于吸头4的一侧,通过吸头4采用喇
叭结构,吸力面积更多,方便水面浮动垃圾进入,吸附管3采用吸管折叠结构,使吸附管3整体更于便携使用,方便拆叠放置。
41.在一个实施例中,船体1的后表面均匀安装有螺旋桨11,通过螺旋桨11的设置,使plc控制器24控制多个螺旋桨11分别启动,从而方便控制船体1转动和前进的方向。
42.在一个实施例中,船体1的内侧底壁安装有内置箱18,内置箱18的内壁安装有蓄电池19,通过内置箱18的设置,用于保护蓄电池19的安装位置,其中蓄电池19分别与摄像头5、水泵6、扫描激光雷达14、风速传感器15、电机16、陀螺仪22、加速度传感器23和plc控制器24进行供电。
43.在一个实施例中,船体1的上表面安装有太阳能光伏发电板12,通过太阳能光伏发电板12的设置,用于方便将太阳转化为电能,然后将电能储存至蓄电池19内。
44.在一个实施例中,杂物收集箱13为软网式设计,软网设计有缓冲作用同时减小了浮力,降低垃圾对船体1的伤害。
45.在一个实施例中,扫描激光雷达14经过测量激光发射到反射回来消耗的时间,而后乘以光速就可以获得目标的距离位置;
46.陀螺仪22采集了船体1的水平、垂直、俯仰、航向和角速度;
47.加速度传感器23测得加速度;
48.由此可以得到更可靠的环境信息,然后运用以上信息进行slam建图,slam建图首先利用扫描激光雷达14进行预处理:对雷达形成的点云原始数据进行优化,剔除一些有问题的数据,或者进行滤波,对水面垃圾进行初步位置确定;其次利用slam3.0软件系统匹配,把当前这一局部环境的点云数据在已经建立的地图上寻找对应的垃圾位置,进行匹配。最后地图融合:将来自扫描激光雷达14的新一轮数据拼接到原始地图当中,最终完成地图的更新;
49.当定位和建图搞定之后,下一个就要解决移动的问题了,即船体1a到目标垃圾点b之间的导航规划能力;
50.路径规划以避开水域边缘为前提,以经过杂物所在位置为目标;
51.slam系统将路径规划分为:全局规划和局部规划,当目标点距离过远时采用全局规划,slam系统规划路径到目标点路径,当目标点距离过近时采用局部规划,控制船体1进行周围垃圾收集达到清理效果,但是杂物在水体中定然是多点分布,基于此可出现数以万计的预期路径;
52.对上述多条路径进行归划,运用plantsimulation软件进行遗传算法分析,分析模型参数适应度,得到我们需要的优化结果。在运算过程中,参照风速传感器15采集的风速信息(当风速在十分钟内有五分钟超过7米每秒时,路径规划方向与风向同向,直至这一区域垃圾收集结束。当风速在十分钟内有五分钟超过14.5米每秒时,路径规划自主返航,直至风速持续小于14.5米每秒),在杂物收集箱13垂直箱壁处安装红外线发送装置20,在与其平行处安装红外线接收装置21,当杂物收集箱13中的垃圾收集到此高度时,红外线接收装置21接收的信号产生变化,经放大与信号处理后进行信息反馈,当回馈信息超过30秒时,即可说明杂物收集箱13内容量不足,输出返航信息,以最少耗能为前提计算出多条路径中的最优解,使机器人最终实现路径的自主规划;
53.路径规划完成后通过plc控制器24进行控制,分别与摄像头5、水泵6、扫描激光雷
达14、风速传感器15、电机16、陀螺仪22和加速度传感器23电性连接,方便进行控制使用。
54.本发明在工作时:由摄像头5为主,扫描激光雷达14、风速传感器15、陀螺仪22和加速度传感器23为辅进行信息收集,将收集到的信息传递到plc控制器24中,先将大型垃圾信息储存至plc控制器24内,此时将收集的信息和plc控制器24内体现储存的大型垃圾信息进行比对,相似度大于80%为大型垃圾,反之为小型,由此即可识别杂物的大小,当使用摄像头5、扫描激光雷达14、风速传感器15、陀螺仪22、加速度传感器23和plc控制器24组合识别到小型垃圾时,plc控制器24控制水泵6的吸附组件2打开,依靠水泵6进行吸取,通过吸附组件2和吸头4将垃圾与水一同吸到杂物收集箱13内,运用杂物收集箱13滤网进行过滤,将微小垃圾留在杂物收集箱13内,水从滤网排出,当使用摄像头5、扫描激光雷达14、风速传感器15、陀螺仪22、加速度传感器23和plc控制器24组合识别到大型垃圾时,将通过plc控制器24控制关闭吸附组件2和水泵6时,启动电机16和传动机构17进行启动,电机16的输出轴带动第二皮带轮26进行转动,第二皮带轮26带动皮带本体27进行传动至第一皮带轮25上,第一皮带轮25带动转轴10进行转动,转轴10分别带动内叶8和外叶9进行转动,外叶9用亚克力板来用作排水动力系统,内叶8采用网状结构来收集水面垃圾,进而将水面上的垃圾卷入船体1尾部的可装卸的杂物收集箱13,在本船体1两侧浮漂的尾部,有着四个伸入水下的螺旋桨11,它们的作用是便于控制船体1的转动和前进的方向,在船体1的上层安装的是太阳能光伏发电板12,此设计既可以为蓄电池19充电,也可保护电子设备避免在水面工作时受到暴晒,从而导致的元器件老化或损坏。
55.(二太阳能光伏发电板续电设计
56.本发明设计时,为了更加合理的利用清洁能源设计,所以安装太阳能光伏发电板12在船体1顶部,在船体1上有效的利用其为船体1运作提供动力,有力的体现环保的主题。当今的水上垃圾收集船大多使用锂电池进行运作,因此在使用前需要进行长时间的充电,使用时间也有限制。而使用太阳能光伏发电板12进行续电可以实现长时间的水上作业。应用于船体1的太阳能光伏发电板12安装在很大程度上影响着太阳能光伏发电板12的发电量,除了要考虑到接收阳光的向阳位置外,还要考虑到遮盖物对太阳能光伏发电板12的遮挡效果。基于上述已有的太阳能光伏技术,本产品搭载的太阳能光伏发电板12在船体1的最顶部,使得太阳能光伏系统得到最大限度的利用。与太阳能光伏发电板12相连的转换器和蓄电池19安装在内置箱(18中,并对其进行了防水处理,保障船体1的正常运行。三杂物收集箱
57.杂物收集箱13为软网式设计,软网设计有缓冲作用同时减小了浮力,降低垃圾对船体1的伤害。杂物收集箱13垃圾的方法为拖拽法,使收集好的垃圾仍然依靠自身浮力漂浮,增大了船体1的承载量,降低了对动力的要求,极大的提高本发明的功能性。杂物收集箱13可拆卸的特点使收集垃圾更加便捷。为实现智能运行在杂物收集箱13垂直箱壁处安装红外线发送装置20,在与其平行处安装红外线接收装置21,当杂物收集箱13中的垃圾收集到此高度时,红外线接收装置21接收的信号产生变化,经放大与信号处理后进行信息反馈,当回馈信息超过30秒时,即可说明杂物收集箱13内容量不足,输出返航信息。
58.四差速转向应用
59.本发明的方向控制是通过控制四个水下推进器的转速实现的。用不同的转速来弥补距离的差异。因此哪一侧的水下推进器较慢,船体1就向哪边转向。如果要在原地“调头”,
只要把一侧的水下推进器完全停住,使其产生的动力为零,靠另一侧水下推进器的运作就可以带动船体1在原地转向了。通过控制电调来控制电流进而驱动水下推进器完成相关指令,以实现船体1的转向。在最初的转向设计中,我们拟定两套方案,分别是差速转向装置与舵机转向装置,这两套转向设计各有利弊。在后续的设计中,考虑到垃圾收集时需要船体1低速行进的因素,对于两种转向装置进行分析之后差速转向相较于舵机转向有明显优势。综上所述,我们选择差速转向作为本发明的转向装置。
60.五中部卷入漩涡机构为创新型设计
61.在船体1运作中,垃圾很有可能对船体1的杂物收集箱13造成伤害,因此设计了垃圾收集辅助装置——卷入漩涡机构7。中部叶轮的设计灵感来源于水车结构,以实现通为船体1提供动力。在机构的运作中,因为叶轮直径很大,所以水流以很小的力就可以推动水车的运作。基于此原理,卷入漩涡机构7的外叶9用以提供动力可以最大限度的发挥叶轮的作用。该机构由电动机16通过带轮进行带动完成转动,为船体1提供部分动力。在叶轮旋转过程中,亚克力板部分浸入水中,而与水面垃圾接触的位置为内叶8,即网格,网格在水流的冲刷下可以将垃圾网入其中以实现垃圾的高效收集。转轴10位置为网状连接,有减阻、减重的优点,有力的降低了船体1运作对于水面环境的要求。卷入旋涡结构为三叶设计,便于卷入垃圾,减少垃圾无法卷入的可能性。
62.六电阻式风向传感器与陀螺仪以及加速度计
63.风速传感器15采用热式风速传感器,机器人通过对风速的信息采集完成最优路径归划并规避风险。经过我们团队的计算机仿真模拟以及多次的实地记录发现,当风速超过7米每秒时,水面上就会有明显波动,且垃圾会像风向相同方向聚集,导致垃圾一处堆的特殊现象,而当风速大于14.5米每秒时,船体1运动受到较为严重的影响,当风速超过20米每秒时,船体1会有被掀翻的可能性。所以综合统计学中的统计规律,我们规定:当风速在十分钟内有五分钟超过7米每秒时,路径规划方向与风向同向,直至这一区域垃圾收集结束。当风速在十分钟内有五分钟超过14.5米每秒时,路径规划自主返航,直至风速持续小于14.5米每秒。
64.内置箱18中的传感陀螺仪以及加速度传感器可采集机器人的各项参数。传感陀螺仪22可以实时反应船体1的水平、垂直、俯仰、航向和角速度。加速度传感器23可测得加速度。将所采集的数据传送给机器人大脑,这是实现全智能化的基础。
65.当吸附装置2打开时,垃圾能够依靠水的流动性从水面上自动流入垃圾自动收集船。并且我们还配置了智能自动识别系统5,它的作用是能够自动侦测垃圾的大小分类,当面对小型垃圾时,向树叶浮游水藻以及塑料袋,可以用吸附装置2来进行吸收垃圾。当侦测到大件垃圾时,将吸附装置2自动关闭,采用卷入涡轮结构7进行收垃圾,像水瓶、泡沫等垃圾。二者相互配合,。
66.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到其各种变化或替换,这些都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1