一种基于间隔电磁铁设置的磁流体减摇控制带缆水下潜器
本发明涉及一种带缆水下潜器,特别是涉及一种基于间隔电磁铁设置的磁流体减摇控制带缆水下潜器。
背景技术:
1、带缆水下潜器是一种工作于海洋复杂环境,执行海洋环境监测,海洋水文数据观测,海洋生物观察以及相应军事任务的重要平台。其前进的动力主要来源于船舶、潜艇或反潜直升机的拖曳力,此外其可通过相应的拖缆和线缆传输相应的信号和电力实现动态监测和水下运动姿态调整。
2、带缆水下潜器的运动控制方式随着技术的进步,从最初的收放缆绳的长度和确认相应的拖航速度来控制水下潜器的定深,到背面利用相应的升沉水翼来实现水下潜器在拖航时的升沉运动,进而控制水下潜器的水下深度。此外,通过给水下潜器配置螺旋桨来实现螺旋桨的转艏运动也是常见的转艏控制技术。但一方面,这些控制方式都极易受到拖航运动的速度影响,拖曳的缆绳作为拖曳平台和带缆水下潜器的纽带在不同的拖航速度下会受到不同的流体力,这将诱导带缆水下潜器产生纵倾或发生侧翻。另一方面,若高速拖曳带缆水下潜器时,水下潜器所配置的螺旋桨由于进速过大,可能会出现转艏控制失效的情况。此外,拖曳平台在水面受到的风浪流也会通过缆绳传递给带缆水下潜器,这将水下潜器发生过大的横倾或者纵倾,以至水下潜器所搭载的测量仪器降低测量精度或者失效,因此,如何实现带缆水下潜器在水中的运动姿态的稳定、各种工况下转艏、升沉,以及提高控制可靠性成为带缆水下潜器研发过程中需要面对的难题。
3、中国发明专利申请2004100650773公开了一种将磁流体技术应用于船舶减摇的设备,其包括海水通道以及布置在其外部的液氦储箱、超导磁体以及相应的电极、超导磁体均匀布置于管道外壁,电极布置于管道内,以此保证磁感线方向与海水通道的方向垂直,以及载流海水沿通道方向喷射。该设备通过调节电流与磁场的方向,使得载流海水(磁流体)沿着海水通道喷射,由此产生相应的反作用力矩来减少摇荡。因此,其本质类似于喷水推进器,但又需要配置重量极大的液氦储箱来为超导磁体产生一个超低温环境,以及配备大型的发电机来对海水通电。液氦储箱和大型发电机都会增加相应的技术成本以及极大的增加重量,降低减摇机构的可靠性。此外,由于该技术将海水作为导电体,意味着该减摇机构无法在内河航行的淡水环境中使用。
4、中国发明专利申请cn107351096公开了一种可控制水下机器人,包括非回转体的流线型主体;主体中部内前、中、后分别设有重心调节机构、动力电池组和设备仓;主体的两侧部内分别设有浮力舱;重心调节机构包括按前、后位置设置的重块和直线电机,重块以滚动的方式设于前、后向的槽道中,直线电机前、后伸缩的输出轴通过推拉杆连接重块。轴通过带动重块往前或往后移动,使得水下机器人的重心向前或向后改变而实现其位姿的改变。但该重块只能在槽道内移动,因此其只能沿着纵向移动,调整水下机器人纵向的重心。该重心调节机构无法处理水下潜器在复杂海洋环境中需要调整不同方向、不同位置重心的需求。
技术实现思路
1、本发明主要是解决现有技术中所存在的技术问题,提供一种操纵迅速灵活、磁流体减摇机构简单可靠、拖航姿态稳定,减摇迅速高效的基于间隔电磁铁设置的磁流体减摇控制带缆水下潜器。通过
2、本发明目的通过下述技术方案实现:
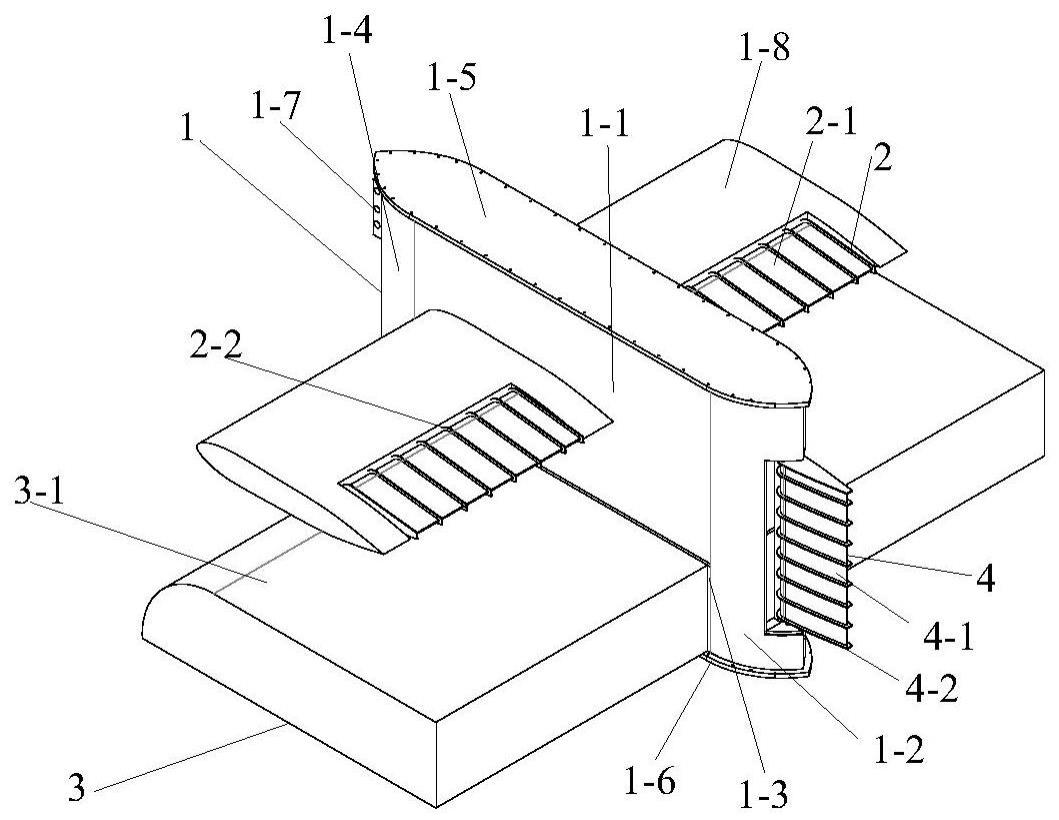
3、基于间隔电磁铁设置的磁流体减摇控制带缆水下潜器,包括主体、升沉控制机构、磁流体减摇机构和转艏控制机构;主体主要由纵向设置的空腔和水平设置的水平翼组成;水平翼对称设置在空腔外中部两侧;升沉控制机构为电机驱动升沉水翼控制结构,升沉水翼对称设置在水平翼两侧后端;转艏控制机构是由电机驱动转艏水翼控制结构,转艏水翼设置在空腔外中部前端;所述的磁流体减摇机构包括磁流体控制舱、电磁铁、磁流体;磁流体控制舱为两个空心结构,对称布置于空腔两侧的底部;每个磁流体控制舱前部呈现曲面,顶部为水平面;磁流体控制舱内部的顶面、前部弧面和底面水平间隔布置多条电磁铁,间隔为2-2.5cm;磁流体控制舱的左面、右面、背面都竖直间隔设置多条电磁铁,左面和右面一起构成侧面;电磁铁控制器有三个输入端和多个输出端,每个输出端连接对应一个电磁铁的正极,电磁铁和电源的负极共同连接到控制器的一个输入端,另一个输入端接直流电源正极,第三个输入端连接上位机的信号线;磁流体放置于磁流体控制舱,加入量为磁流体控制舱容积的1/3-2/3。
4、为进一步实现本发明目的,优选地,所述的磁流体为悬浮在有机溶剂中的纳米级铁磁性颗粒制成的胶体液体。
5、优选地,所述的有机溶剂为庚烷、二甲苯、甲苯或丁酮。
6、优选地,所述的曲面的曲率大于0.5且小于0.8;所述的电磁铁采用粘接的方式固定于磁流体控制舱的内壁;每个电磁铁的正负极与脐带缆线芯连接,并填充密封胶,脐带缆线芯连接到电磁铁控制器的输入端和输出端。
7、优选地,所述的主体的空腔包括通过隔板分隔的升沉水翼控制舱、转艏尾翼控制舱、仪器舱、水密隔舱;升沉水翼控制舱呈长方形结构,布置于主体中部;转艏尾翼控制舱位于主体尾部,为长方形结构;仪器舱为u形结构,开口部分为升沉水翼控制舱;水密隔舱为长方形结构,位于主体的前部。
8、优选地,所述的主体还设有导缆孔、还包括控制舱舱盖和仪器舱舱盖;导缆孔设置在水密隔舱外壁面的正前方;控制舱舱盖设置在主体上端,并通过若干螺栓以及水密垫圈从前至后分别与水密隔舱、仪器舱、升沉水翼控制舱和转艏尾翼控制舱固定;仪器舱舱盖设置在主体下端,并通过若干螺栓以及水密垫圈从前至后分别与水密隔舱、仪器舱和转艏尾翼控制舱固定。
9、优选地,所述的升沉控制机构包括升沉水翼、升沉导流板、升沉驱动轴、升沉直线电机、升沉蜗杆、升沉蜗轮;升沉水翼为水密实心结构,升沉水翼对称设置在水平翼两侧后端,升沉水翼沿展长方向间隔设置多个升沉导流板;升沉驱动轴穿过升沉水翼控制舱和部分水平翼,轴向固连在升沉水翼前端;在升沉驱动轴中部设有升沉蜗轮,升沉蜗轮与升沉蜗杆啮合,升沉蜗杆与升沉直线电机连接。
10、优选地,所述的升沉水翼的弦长为水平翼的2/3~3/4;在水平翼两侧后端开有缺口,升沉水翼在缺口中固定;所述的升沉驱动轴的一端设置有平键,通过平键与升沉蜗轮进行轴毂连接。
11、优选地,所述的转艏控制机构包括纵转艏水翼、转艏导流板、转艏驱动轴、转艏直线电机、转艏蜗杆、转艏蜗轮;转艏水翼为水密实心结构,转艏水翼设置在空腔外中部前端;转艏水翼沿展长方向布置有若干转艏导流板;转艏驱动轴穿过转艏水翼控制舱,轴向固定在转艏水翼后端;转艏驱动轴上设有转艏蜗轮,转艏蜗轮与转艏蜗杆连接,转艏蜗杆与转艏直线电机连接。
12、优选地,所述的优选转艏驱动轴的上端设置有平键,通过平键与转艏蜗轮进行轴毂连接;转艏蜗轮布置在转艏控制舱内,转艏蜗轮下方为转艏蜗杆;转艏水翼的展长为立式翼型的主体垂向的1/5~2/5;空腔外中部前端开有缺口,转艏水翼在缺口中固定。
13、与现有技术相比,本发明的有益效果是:
14、(1)操纵迅速灵敏。本发明的带缆水下潜器具有升沉控制机构和转艏控制机构,因而本发明在拖曳时具有良好的操纵能力。在控制带缆水下潜器升沉时,一方面可以通过卷缆机调节缆绳的长度控制水下潜器的深度。另一方面可以利用主体设置的升沉控制机构控制水下潜器的深度。升沉控制机构中的升沉水翼设置有导流板,增强了导流效果,使得升沉控制效果增加。升沉水翼在来流的作用下产生迫沉力或者升力,使得带缆水下潜器上升或者下沉。当控制带缆水下潜器的转艏时,带缆水下潜器通过设置在主体后方的转艏水翼来转艏。转艏水翼在流体的冲击下,产生一个与水翼旋转方向相反的力,该力作用点与水下潜器重心有一个较长的距离,产生一个作用在水下潜器上的转艏力矩。
15、(2)磁流体减摇机构简单可靠。本发明的水下减摇机构与传统机械传动减摇装置相比,如无需配备齿轮传动机构、气压阀和水泵等机构,仅利用电磁力来调节水舱两侧的磁流体的分布,从而降低水下潜器的摇荡程度。在复杂的海洋环境中,磁流体减摇机构直接将电能转换成流体动能,从而减小带缆水下潜器的摇荡。由于其传递动能的方式简单,该机构发生故障的可能性较低。此外,相较于船用内磁式减摇器(cn1586984a)这项发明,首先,本发明的磁流体减摇机构无需配置重量极大的液氦储箱来为超导磁体产生一个超低温环境,以及配备大型的发电机来对海水通电。液氦储箱和大型发电机都会增加相应的技术成本以及极大的增加水下潜器的重量,降低减摇机构的可靠性。其次本发明从适用范围上更广,在内河环境同样适用,而无需将海水作为导电体,使得载流海水产生相应的减摇力矩。综上,本发明较为简单可靠。
16、(3)拖航姿态稳定。本发明在多种航速下的姿态稳定,能有效的减少纵摇、横摇、和保持航向。本发明通过选用了大展长的水平翼、以及相应的竖直翼型的仪器舱、流线型的磁流体减摇控制舱增强带缆水下潜器的稳定性。水平翼和竖直翼型的设计减小了水下潜器所受到的流体阻力。此外,带缆水下潜器的上方的舱室以及水平翼1-8处于水密空腔结构,提高了浮心。两侧的磁流体减摇控制舱和仪器舱置于水下潜器的底部,降低了带缆水下潜器的重心。二者相结合,提高了带缆水下潜器的稳性,使其处于稳态平衡的状态。大展长的水平翼和竖直翼的仪器舱提供了较大的横纵惯性矩,进一步增加了带缆水下潜器的扶正力矩。综上所述,本发明在拖航时姿态稳定。
17、(4)减摇迅速高效。相较于cn107351096a中的重心调节机构,仅能通过纵向移动水下潜器内部的重块来处理纵摇,本发明利用电磁铁的闭合与断开来实时调节磁流体的在减摇舱中的分布,可实现磁流体在舱中的多方向,多位置的调节,改变水下潜器整体重心的分布,以产生对应的减摇力矩应对所产生的横摇以及纵摇,通过增大或减小电流,来增加或减小磁场强度,进而调节磁流体移动的速度,由此提高了水下潜器应对不同海况的能力,减摇迅速高效。
18、(5)舱室划分合理。本发明通过利用各个隔板将舱室划分成各个水密舱室。带缆遥控水下潜器的仪器设备和运动姿态控制设备分别放置在不同的水密隔舱内,避免了仪器设备受到干扰,也保证了仪器设备探测的稳定和精确。此外,多舱室划分在带缆水下潜器遇到撞击或其他操作失误等因素导致舱室损坏进水,可有效的将损失控制在一定的范围内。
19、(6)有效降低阻力和涡激振荡。从发明原理来看,本发明的减摇本质是利用电磁铁来调节铁磁流体在磁流体控制舱中的重量分布,并由此产生相应的减摇力矩,与cn1586984a船用内磁式减摇器利用电离后的海水磁流体的喷射产生反作用力减摇相比,其原理有本质不同;本发明的减摇装置的流线型的水动力设计使其在水下潜器的应用中能有效降低阻力和涡激振荡。
- 还没有人留言评论。精彩留言会获得点赞!