一种小水线面双体船首尾稳定鳍联合控制方法与流程
本发明涉及小水线面双体船,尤其是一种小水线面双体船首尾稳定鳍联合控制方法。
背景技术:
1、小水线面双体船是一种高性能船舶,由深置水下的双潜体、小水线面支柱和宽敞的上船体三部分组成,具有良好的耐波性、可操纵性,以及航向稳定性好、甲板、宽上层舱容大等优点,应用于中小型客船、渡船和交通船等领域。由于小水线面双体船的独特线形和构型,航行工况下,不同航速的来流水动力作用会对其水下潜体产生不同程度的纵向倾覆力矩,该倾覆力矩会随航速而变化,同时其恢复力矩非常小,因此小水线面双体船纵向稳定性较差,航行中纵倾和纵摇较大。
2、现有技术中,通过在小水线面双体船下潜体的首部和尾部分别安装一对稳定鳍,以减小船舶纵倾和纵摇的问题。但是,现有技术中首尾稳定鳍采用单独控制调节的方式,缺乏成熟的、安全的、满足工程应用的对小水线面双体船首尾稳定鳍联合控制调节的方法,能够在满足船舶纵向稳定性需求的同时使得船体阻力最低,这是制约小水线面双体船推广应用的关键因素。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种小水线面双体船首尾稳定鳍联合控制方法,得到船体阻力与首鳍攻角以及尾鳍攻角之间的工程经验公式以及小水线面双体船的纵向稳定方程,从而求得船体阻力最低时,首鳍与尾鳍调节转角值,为小水线面双体船稳定航行控制提供理论指导,通过联合控制首尾鳍即可达到在保证船体阻力最低的同时满足船舶的纵向稳定性需求。
2、本发明所采用的技术方案如下:
3、一种小水线面双体船首尾稳定鳍联合控制方法,包括小水线面双体船,所述小水线面双体船首部的内舷侧安装有对称布置有首鳍,小水线面双体船尾部的内舷侧安装有对称布置有尾鳍,小水线面双体船上搭载控制系统、环境感知传感器和船体姿态传感器;
4、首尾稳定鳍联合控制方法包括如下操作步骤:
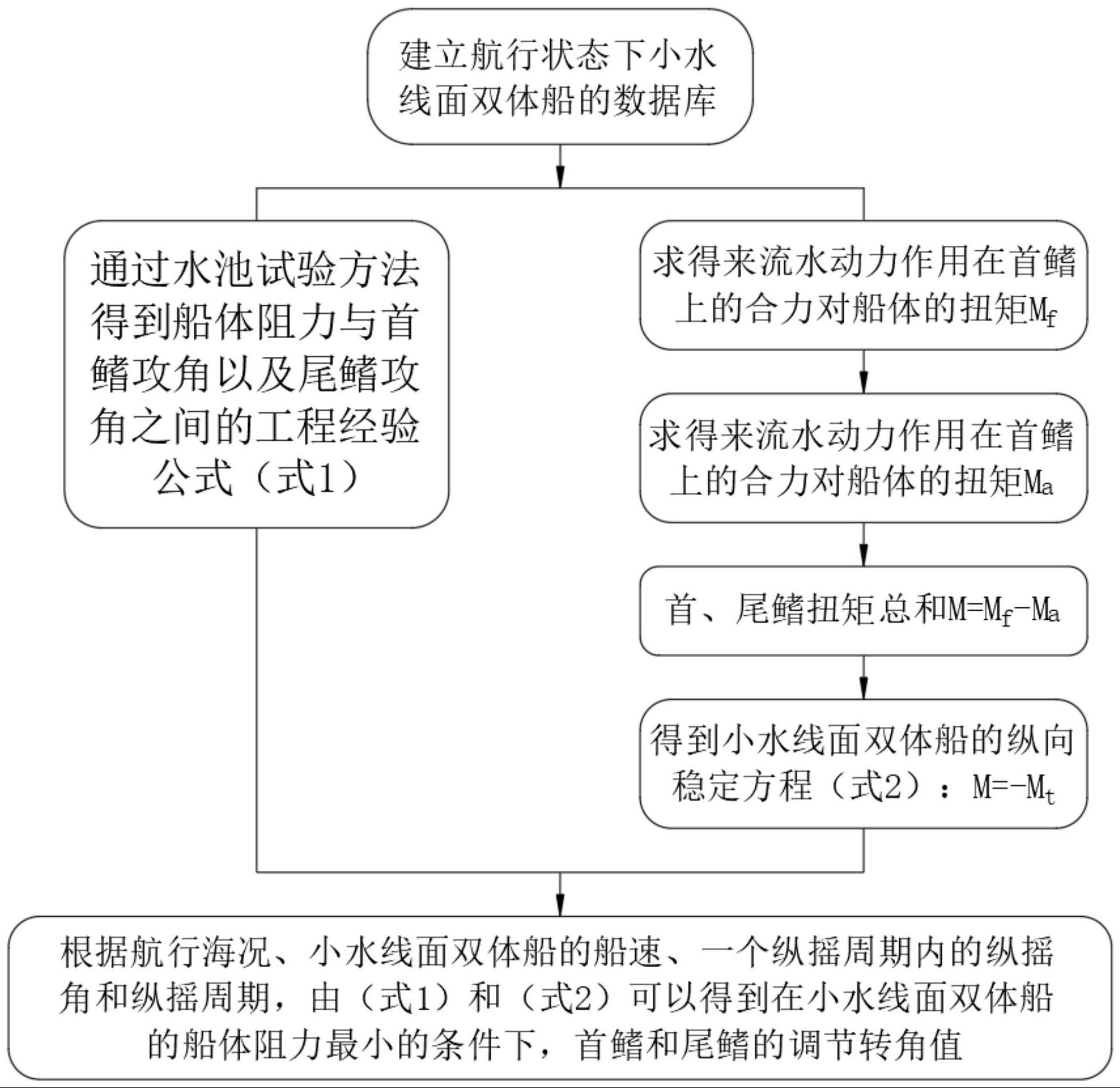
5、s1.建立航行状态下小水线面双体船的数据库,数据库中包括小水线面双体船的船体、首鳍和尾鳍的结构参数和尺寸参数;
6、s2.小水线面双体船的船速为v时,通过水池试验方法得到小水线面双体船的船体阻力rt与首鳍的攻角α以及尾鳍的攻角β之间的工程经验公式(式1):
7、rt=r(v,α,β)=(xv2+yv-z)(msin2α+n)(msin2β+n) (式1)
8、(式1)中,rt表示小水线面双体船的船体阻力;v表示小水线面双体船的船速;α表示首鳍的攻角;β表示尾鳍的攻角;x、y、z、m、n表示常数,由水池试验方法拟合测得;
9、s3.小水线面双体船在航行工况下,设来流的流速为vr,则来流水动力作用在首鳍(1)上的合力p由下式得到:
10、
11、式中,p表示来流水动力作用在首鳍上的合力,合力p与水平方向的夹角为θ=arctan(pay/pax);
12、pax表示首鳍鳍面阻力,为合力p平行于来流方向的分量,pax=(ρvr2acx)/2;
13、pay表示首鳍鳍面升力,为合力p垂直于来流方向的分量,pay=(ρvr2acy)/2;
14、ρ表示来流的密度;
15、vr表示来流的流速,vr=v(1-ψ),式中,v表示小水线面双体船的船速,ψ表示小水线面双体船船体在首鳍处的伴流系数;
16、a表示首鳍的总面积;
17、cx表示来流对首鳍的阻力系数;
18、cy表示来流对首鳍的升力系数;
19、从而可以得到来流水动力作用在首鳍上的合力p对小水线面双体船船体的扭矩mf由下式可得:
20、
21、式中,mf表示来流水动力作用在首鳍上的合力p对小水线面双体船船体的扭矩;
22、表示合力p的向量;
23、表示小水线面双体船船体的漂心到首鳍压力中心点的距离向量;
24、p表示来流水动力作用在首鳍上的合力,合力p与水平方向的夹角为θ=arctan(pay/pax);
25、l表示小水线面双体船船体的漂心到首鳍压力中心点的距离,小水线面双体船船体漂心到首鳍压力中心点的连线与水平方向的夹角为t,t=t0-γ,t0表示小水线面双体船初始状态或水平状态时小水线面双体船船体漂心到首鳍压力中心点连线与水平线的夹角,γ表示小水线面双体船在一个纵摇周期t0内的纵摇幅值角;
26、σ表示向量与的夹角,σ=θ-t,θ表示合力p与水平方向的夹角,t表示小水线面双体船船体漂心到首鳍压力中心点的连线与水平方向的夹角;
27、pax表示首鳍鳍面阻力,为合力p平行于来流方向的分量,pax=(ρvr2acx)/2;
28、pay表示首鳍鳍面升力,为合力p垂直于来流方向的分量,pay=(ρvr2acy)/2;
29、ρ表示来流的密度;
30、vr表示来流的流速,vr=v(1-ψ),式中,v表示小水线面双体船的船速,ψ表示小水线面双体船船体在首鳍处的伴流系数;
31、a表示首鳍的总面积;
32、cx表示来流对首鳍的阻力系数;
33、cy表示来流对首鳍的升力系数;
34、s4.来流水动力作用在尾鳍上的合力p′由下式得到:
35、
36、式中,p′表示来流水动力作用在尾鳍上的合力,合力p′与水平方向的夹角为θ=arctan(pay′/pax′);
37、pax′表示尾鳍鳍面阻力,为合力p′平行于来流方向的分量,
38、pay表示尾鳍鳍面升力,为合力p′垂直于来流方向的分量,
39、ρ表示来流的密度;
40、vr′表示来流的流速,vr′=v(1-ψ′),式中,v表示小水线面双体船的船速,ψ′表示小水线面双体船船体在尾鳍处的伴流系数;
41、a′表示尾鳍的总面积;
42、cx′表示来流对尾鳍的阻力系数;
43、cy′表示来流对尾鳍的升力系数;
44、从而可以得到来流水动力作用在尾鳍上的合力p′对小水线面双体船船体的扭矩ma由下式可得:
45、
46、式中,ma表示来流水动力作用在尾鳍上的合力p′对小水线面双体船船体的扭矩;
47、表示合力p′的向量;
48、表示小水线面双体船船体的漂心到尾鳍压力中心点的距离向量;
49、p′表示来流水动力作用在尾鳍上的合力,合力p′与水平方向的夹角为θ′=arctan(pay′/pax′);
50、l′表示小水线面双体船船体的漂心到尾鳍压力中心点的距离,小水线面双体船船体漂心到尾鳍压力中心点的连线与水平方向的夹角为t′,t′=t0′-γ,t0′表示小水线面双体船初始状态或水平状态时,小水线面双体船船体漂心到尾鳍(2)压力中心点连线与水平线的夹角,γ表示小水线面双体船在一个纵摇周期t0内的纵摇幅值角;
51、σ′表示向量与的夹角,σ′=θ′-t′,θ′表示合力p′与水平方向的夹角,t′表示小水线面双体船船体漂心到尾鳍压力中心点的连线与水平方向的夹角;
52、pax′表示尾鳍鳍面阻力,为合力p′平行于来流方向的分量,
53、pay表示尾鳍鳍面升力,为合力p′垂直于来流方向的分量,
54、ρ表示来流的密度;
55、vr′表示来流的流速,vr′=v(1-ψ′),式中,v表示小水线面双体船的船速,ψ′表示小水线面双体船船体在尾鳍处的伴流系数;
56、a′表示尾鳍的总面积;
57、cx′表示来流对尾鳍的阻力系数;
58、cy′表示来流对尾鳍的升力系数;
59、s5.首鳍与尾鳍分别位于小水线面双体船船体漂心的前后方,来流水动力作用在首鳍与尾鳍上的合力产生的扭矩相反,则小水线面双体船首、尾鳍扭矩总和m=mf-ma;
60、根据步骤s3.得到的来流水动力作用在首鳍上的合力p对小水线面双体船船体的扭矩mf与步骤s4.得到的来流水动力作用在尾鳍上的合力p′对小水线面双体船船体的扭矩ma即可得到小水线面双体船首、尾鳍扭矩总和m;
61、s6.通过小水线面双体船上搭载的环境感知传感器获取小水线面双体船航行所处的海况,通过船体姿态传感器获取小水线面双体船的纵向姿态,即纵摇周期t0和一个纵摇周期t0内的纵摇角γ;
62、根据船舶基本原理,对于小倾角倾斜或摇动,克服该纵摇角γ需要的力矩
63、式中,δ表示小水线面双体船的排水量;
64、表示船舶纵稳性高;
65、从而得到小水线面双体船的纵向稳定方程:
66、m=-mt (式2)
67、(式2)中,m表示步骤s5.中得到的小水线面双体船首、尾鳍扭矩总和;
68、mt表示克服一个纵摇周期t0内的纵摇角γ需要的力矩;
69、s7.根据航行海况、小水线面双体船的船速v、一个纵摇周期t0内的纵摇角γ和纵摇周期t0,由(式1)和(式2)可以得到在小水线面双体船的船体阻力rt最小的条件下,得到首鳍的攻角α以及尾鳍的攻角β;
70、此时,首鳍以小水线面双体船船体为参照的转角值为α-γ,尾鳍以小水线面双体船船体为参照的转角值为β-γ,首鳍与尾鳍转动周期t=t0,t0表示小水线面双体船的纵摇周期;
71、s8.小水线面双体船在航行过程中,根据实时的航行海况、小水线面双体船的船速v、一个纵摇周期t0内的纵摇角γ和纵摇周期t0,控制系统按照步骤s7.中得到相应的首鳍与尾鳍转动周期t、首鳍以小水线面双体船船体为参照的转角值、尾鳍以小水线面双体船船体为参照的转角值,控制首鳍与尾鳍的转动角,从而保证小水线面双体船的纵向稳定性,并能使小水线面双体船船体阻力rt最低。
72、作为上述技术方案的进一步改进:
73、s2.中,首鳍的攻角α与尾鳍的攻角β沿水平线向上为正,向下为负。
74、s3.中,cx、cy可通过来流水动力特性曲线获得,与来流的攻角α和展舷比λ有关;
75、s4.中,cx′、cy′可通过来流水动力特性曲线获得,与来流的攻角α和展舷比λ有关。
76、s6.中,小水线面双体船纵向摇动的小倾角小于15°。
77、s7.中,首鳍和尾鳍的转动角需在机械可调范围内。
78、s7.中,通过环境感知传感器实时监测小水线面双体船的航行海况;
79、通过船体姿态传感器或陀螺仪实时监测水线面双体船的一个纵摇周期t0内的纵摇角γ和纵摇周期t0。
80、s8.中,当小水线面双体船船体的纵摇周期t0=0时,表示小水线面双体船仅存在纵倾,此时,首鳍和尾鳍的转动周期t=0。
81、所述攻角沿水平线向上为正、向下为负。
82、本发明的有益效果如下:
83、本发明步骤合理,操作方便,通过提供一种联合控制调节首鳍与尾鳍转角值的方法,充分考虑首尾稳定鳍攻角对小水线面双体船船体阻力的影响,保证阻力最小时,首尾鳍能够最大限度地减小小水线面双体船船体的纵倾和纵摇,保证了船舶的运行稳定性。
84、本发明计算方法简单,通过环境感知传感器获取小水线面双体船航行所处的海况,通过船体姿态传感器获取小水线面双体船的纵向姿态,带入(式1)和(式2)中即可获得首鳍与尾鳍的转角值,解决了通过首尾稳定鳍联合控制即满足船舶纵向稳定性需求又使船体阻力最低的工程应用核心技术问题。
85、本发明中通过设置控制系统和相应的传感器组件,传感器组件可以实时获取小水线面双体船的航行工况与纵向姿态,控制系统可以根据海况与船舶的姿态数据及时计算得出首、尾鳍需要调节的转角值,从而能够保证小水线面双体船始终航行在稳定且阻力最小的工况下。
- 还没有人留言评论。精彩留言会获得点赞!