一种自主优化船舶艉部流场的控制方法与流程
本发明涉及船舶螺旋桨,尤其是一种自主优化船舶艉部流场的控制方法。
背景技术:
1、螺旋桨凭着优秀的成本效率优势,一直作为船舶最普遍使用的推进装置。根据伯努利定律,螺旋桨高速旋转时,桨叶的高速转动引起桨叶背部的压力降低,形成一个吸力面,在吸力面一侧产生低压。当压力低于水的饱和蒸气压时,液体中的液态分子就转化为气态分子,最终会突然产生大量的气泡,被称为“空泡效应”。
2、船舶航行时螺旋桨空泡给船舶带来十分严重的后果。在空泡破灭时,会产生爆炸性的冲击波,长年累月的冲击造成螺旋桨损伤。同时在发生空泡之后,产生的大量气泡使螺旋桨的阻力加大、推力下降,从而大大降低螺旋桨的推进效率。
3、更为严重的是大量空泡破裂时产生的振动噪音会引起船体的振动,是除船舶柴油机振动外最大的振动噪声源。
4、船舶建造之前可以结合船舶艉部线型进行专业的理论计算分析,判断船舶建造之后是否会存在螺旋桨空泡现象。但是这种计算往往需要大型计算机的辅助,同时需要大量的时间进行建模和计算。对工程项目来说,时间较为紧张。一些船舶没有进行螺旋桨的空泡模拟分析就开工建造。
5、这些船舶可能在建造后存在螺旋桨空泡问题,一旦出现螺旋桨空泡,通过改变螺旋桨所在艉部的线型改变流场是从本质上解决该问题的一个措施。但是这种问题的出现,是船舶建造工程中难以处理的问题。由于船舶已建造好,基本没有可能通过艉部线型的调整,减少或者消除空泡现象的发生。
6、如何在不改变船舶艉部线型的基础上,尽可能减少螺旋桨空泡现象引起的船舶振动及效率下降,是十分迫切需要解决的问题。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种自主优化船舶艉部流场的控制方法,对于新造船或已建造船舶都能从本质上解决螺旋桨空泡发生,从而减少船体振动,提高船舶推进效率,延长螺旋桨寿命。
2、本发明所采用的技术方案如下:
3、一种自主优化船舶艉部流场的控制方法,包括船底板,位于船舶艉部船中位置安装有螺旋桨,所述螺旋桨的正后方为舵机,位于螺旋桨两侧的船底板上安装有舵桨回转装置,位于螺旋桨一旁的船底板的外板处安装有水流传感器,水流传感器实时监测螺旋桨与外板之间水流情况,并向控制单元实时回传水流参数;位于螺旋桨上方和后方区域船底板的内部均匀布置有矩阵排列的激振片,激振片实时监测螺旋桨区域船底外板受到的激振力,然后实时回传至控制单元;
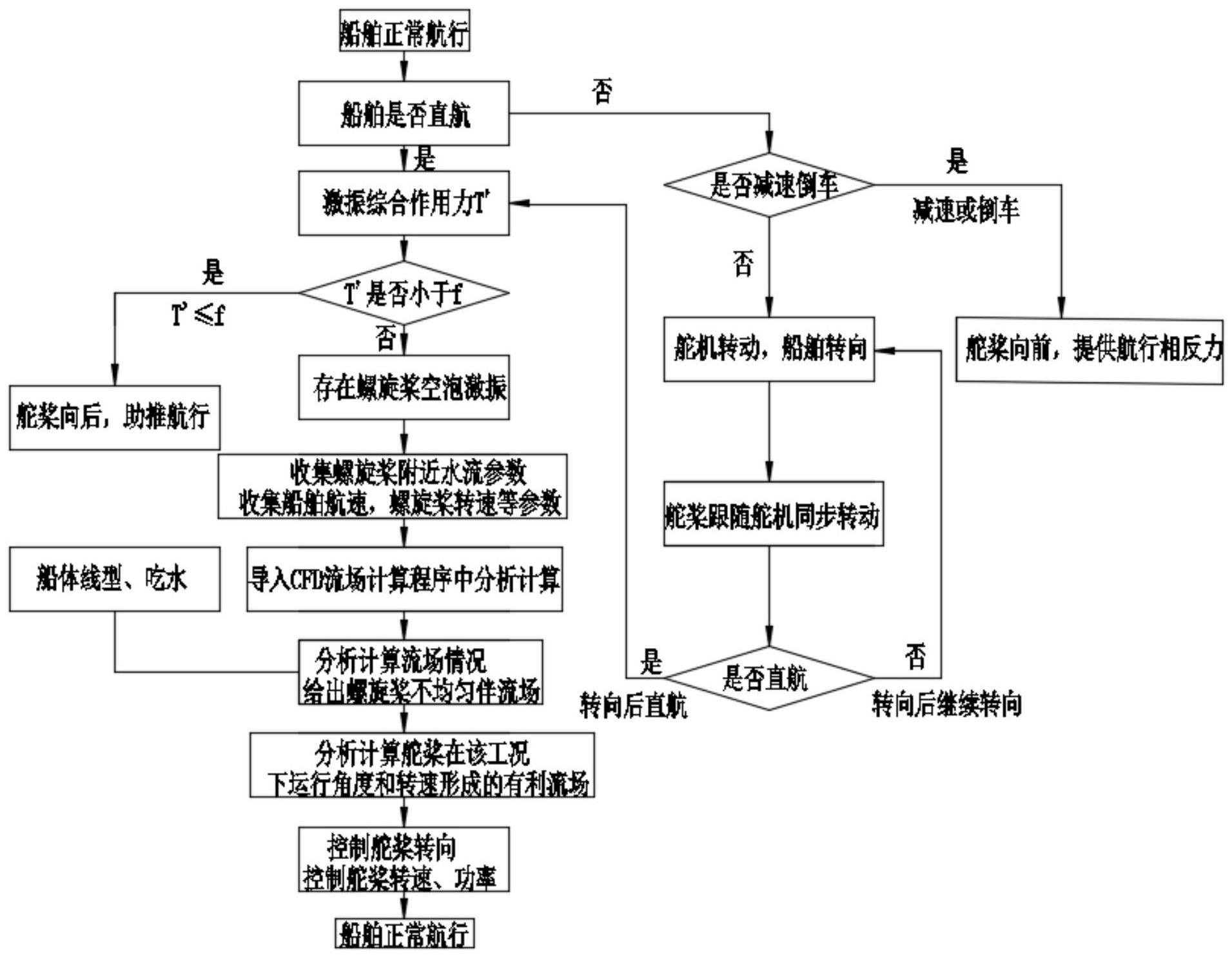
4、当船舶在正常航行时,螺旋桨正常转动,船舶受到向前的推力,以设定航速前进,同时激振片实时采集船底板的激振力,回传至控制单元,控制单元计算激振综合作用力t';
5、船体底部两套舵桨的转速,转向组合为:
6、t(v,s,α,β);
7、船舶转向:
8、当船舶航行时,需要转向,操纵舵机运行,舵机转向信号回送至控制单元,控制单元接收转向信号后,控制艉部后方的两套舵桨回转装置同步转向,且转向与舵机转向一致;
9、船舶在舵机的转向力作用下缓慢转向,当舵机继续转动,两套舵桨回转装置继续跟随同步向一个方向转动,船舶持续转向;
10、当舵机停止转动,两套舵桨回转装置停止转动,船舶保持某一角度转向航行;
11、当舵机回零,船舶直航,控制单元接收舵机转向信号后,向两套舵桨回转装置发出转向回零信号,舵桨回转装置回归安装位置;
12、船舶直航,未发生空泡:
13、船舶直航时,控制单元实时获知激振综合作用力t',t'小于等于船底板正常激振力作用f,未发生螺旋桨空泡现象,船底板所受激振力正常,未出现异常振动现象;
14、此时,船底艉部螺旋桨处流场正常,螺旋桨周围水域无高伴流区域,来流速度正常,螺旋桨上方区域不存在死水区域,当螺旋桨旋经这一区域时,正常通过,无空泡现象发生;
15、此时控制单元控制两套舵桨回转装置向后持续输出推力,助力船舶航行;
16、船舶直航,发生空泡:
17、船舶直航时,控制单元实时获知激振综合作用力t',t'大于船底板正常激振力作用f,发生螺旋桨空泡现象,船底板所受激振力异常,出现异常振动现象;
18、此时,船底艉部螺旋桨处流场异常,螺旋桨上方存在高伴流区域,来流速度为零,螺旋桨上方区域存在死水区域,当螺旋桨旋经这一区域时,由于没有来流,负荷剧烈增加,产生较为严重的空泡,并引起船体振动;
19、控制单元通过水流传感器,感知该区域的水流参数,同时船舶推进控制系统降此时船舶航速、螺旋桨转速、柴油机功率的参数传至控制单元,供控制单元分析综合;
20、控制单元将水流速度、水流流向、船舶航速、螺旋桨转速、柴油机功率的参数形成输据链,传递控制单元中内嵌的cfd流场计算程序中,结合已内嵌在控制单元中船体线型、船舶吃水、船舶主尺度等参数对螺旋桨伴流情况进行分析计算,并给出螺旋桨不均匀伴流场g0;
21、将不同组合下的舵桨转速、转向组合t(v,s,α,β)导入螺旋桨不均匀伴流场g0中,并分析出受到舵桨影响的伴流场g0形成的新伴流场组合g1(g1,g2,g3,...,gn),其中的g1,g2,g3,...,gn,为新伴流场组合g1中的各个流场,分别对应舵桨不同的转速和转向组合t(v1,s1,α1,β1);
22、此时,控制单元控制两台舵桨装置分别向螺旋桨处转动,持续扰动螺旋桨上方水流,破坏原有高伴流区域,增加该区域的来流速度,改变螺旋桨入流条件,保障螺旋桨旋经这一区域时,获得具有动能的来流,避免空泡产生;
23、同时激振片实时回传激振力矩阵至控制单元,控制单元实时获知激振综合作用力t',如果t'还大于船底板正常激振力作用f,则两套舵桨回转装置继续同步转动,继续扰动螺旋桨上方水流,直至激振综合作用力t'小于船底板正常激振力作用f;
24、此时,两套舵桨回转装置保持角度运行,为螺旋桨提供带有动能的来流,增加来流速度。
25、所述舵桨回转装置在360°内自由转动。
26、两套舵桨回转装置对称布置。
27、所述激振片的矩阵有m行n列,单个激振片根据所在行数和列数命名,如pmn——第m行第n列的激振片,所受到的激振力为fmn;
28、激振片所受的激振力矩阵为f,表示为如下矩阵:
29、
30、每个激振片由于距离螺旋桨位置不同,对每个激振片根据其位置,赋予权重系数,pmn激振片被赋予的系数为σmn,各权重系数需满足权重系数矩阵表示成为σ:
31、
32、则,第1行第1列激振片赋权后的激振力为t11=f11×σ11,…,第m行第n列赋权后的激振力为tmn=fmn×σmn,各赋权后的激振力矩阵为t,表示为矩
33、阵如下:
34、
35、螺旋桨处船底板1受到的激振综合作用力为
36、当激振综合作用力t′大于船舶艉部底板正常受力f时,可判定为螺旋桨发生空泡现象。
37、根据新伴流场组合g1(g1,g2,g3,...,gn)分析判断组合中的每一流场g1,g2,g3,...,gn是否会引起螺旋桨工作时空泡,如果新伴流场gn不会引起螺旋桨工作时产生空泡现象,则控制单元查询出该伴流场gn产生时,舵桨的转速v1,s1、转向α1,β1,并通过传递给舵桨控制器,控制舵桨给出相应的转速和转向。
38、根据新伴流场组合g1(g1,g2,g3,...,gn)分析判断组合中的每一流场g1,g2,g3,...,gn是否会引起螺旋桨工作时空泡,如果组合g1(g1,g2,g3,...,gn)中没有一个流场可以避免螺旋桨工作时产生空泡现象,则尝试改变螺旋桨转速,重新获取新的伴流场组合g2(g1,g2,g3,...,gn),直到控制单元查询出有不会引起螺旋桨工作时产生空泡现象的流场gn,此时控制单元查询出该伴流场gn产生时,舵桨的转速v2,s2、转向α2,β2,并通过传递给舵桨控制器,控制舵桨给出相应的转速和转向。
39、船舶减速、倒车:
40、当船舶直航时,需要尽快减速或倒车,控制单元可控制两套舵桨回转装置向前作用,提供与船舶航行方向相反的作用力,使得船舶尽快减速或者倒车;
41、当船舶根据作业工况需要倒车时,两套舵桨回转装置向前作用,给船舶提供倒车力;
42、在螺旋桨空泡发生的同时,将不同组合下的舵桨转速、转向组合g(v1,v2,α1,α2)导入螺旋桨不均匀伴流场g0中,并分析出受到舵桨影响的伴流场g0形成的新伴流场组合g1(g1,g2,g3,...,gn),其中的g1,g2,g3,...,gn,为新伴流场组合g1中的各个流场,分别对应舵桨不同的转速和转向组合g(v1,v2,α1,α2)。如果各个新伴流场(g1,g2,g3,...,gn)中不止有一个流场可以保证螺旋桨在工作时不会产生空泡,则此时控制单元根据两套舵桨回转装置可以根据以下组合t(v,s,α,β)调整姿态,根据反馈的激振综合作用力t'判断对空泡的有效作用。
43、本发明的有益效果如下:
44、本发明结构紧凑、合理,操作方便,通过阵列排布的激振片、水传感器、螺旋桨和舵桨回转装置等部件之间的互相配合工作,可以有效的解决螺旋桨空泡的发生,减少船体振动,提高船舶推进效率,延长螺旋桨寿命。
45、同时,本发明还具备如下优点:
46、(1)保持线型,改动较小。本发明可以针对现有船舶的螺旋桨空泡现象,保持现有艉部线型不变,采取较小的改动措施,加装两台小型舵桨回转装置即可解决螺旋桨空泡问题。
47、(2)提供辅助推力,提高操纵性。本发明可依靠两套舵桨回转装置的不同角度,根据船舶动态提供转向推力,前进推力,减速推力,倒车推力,增加船舶可操纵性,提高操纵性能;
48、(3)根据激振片回传输据以及舵机转向信号,无需船员介入,自动控制舵桨回转装置根据船舶运行状态自行调整运转角度运行。
49、(4)本发明主要应用于艉部线型较为肥大螺旋桨推进船舶,用于解决船舶航行时螺旋桨空泡引起船舶振动,提高推进效率,保障船舶结构安全、航行舒适性。
- 还没有人留言评论。精彩留言会获得点赞!