一种基于避碰规则的船舶航行测试方法及装置
本发明涉及船舶航行,具体涉及一种基于避碰规则的船舶航行测试方法及装置。
背景技术:
1、船舶是人类探索海洋、利用海洋的工具和载体,随着各国对海洋领域的探索不断深入,智能船舶相关研究取得了一些进展。当前阶段,在智能装备研制集成和智能算法开发优化等船舶智能化研究的带动下,针对这些软硬件的测试验证需求逐渐增加,进而推动了以衡量船舶智能化程度、可靠性水平和功能实现完整度为目标的智能船舶测试验证技术的发展,研究其相应的智能航行功能测试与验证技术是当下核心技术需求之一。
2、对于开阔水域航行船舶,航行的过程充满的未知的情况。在船舶航行的过程中,如果与其他船舶发生碰撞,比陆地上更加危险,但是,现有技术中,无法在船舶进行真实航行之前,对系统的避碰功能进行测试,导致船舶通过系统进行航行时,无法对船舶的安全进行保证。
3、因此,急需提出一种基于避碰规则的船舶航行测试方法及装置,解决现有技术中无法对系统的避碰功能进行测试,导致船舶通过系统进行航行时,无法对船舶的安全进行保证的问题。
技术实现思路
1、有鉴于此,有必要提供一种基于避碰规则的船舶航行测试方法及装置,用以解决现有技术中无法对系统的避碰功能进行测试,导致船舶通过系统进行航行时,无法对船舶的安全进行保证的问题。
2、一方面,本发明提供了一种基于避碰规则的船舶航行测试方法,包括:
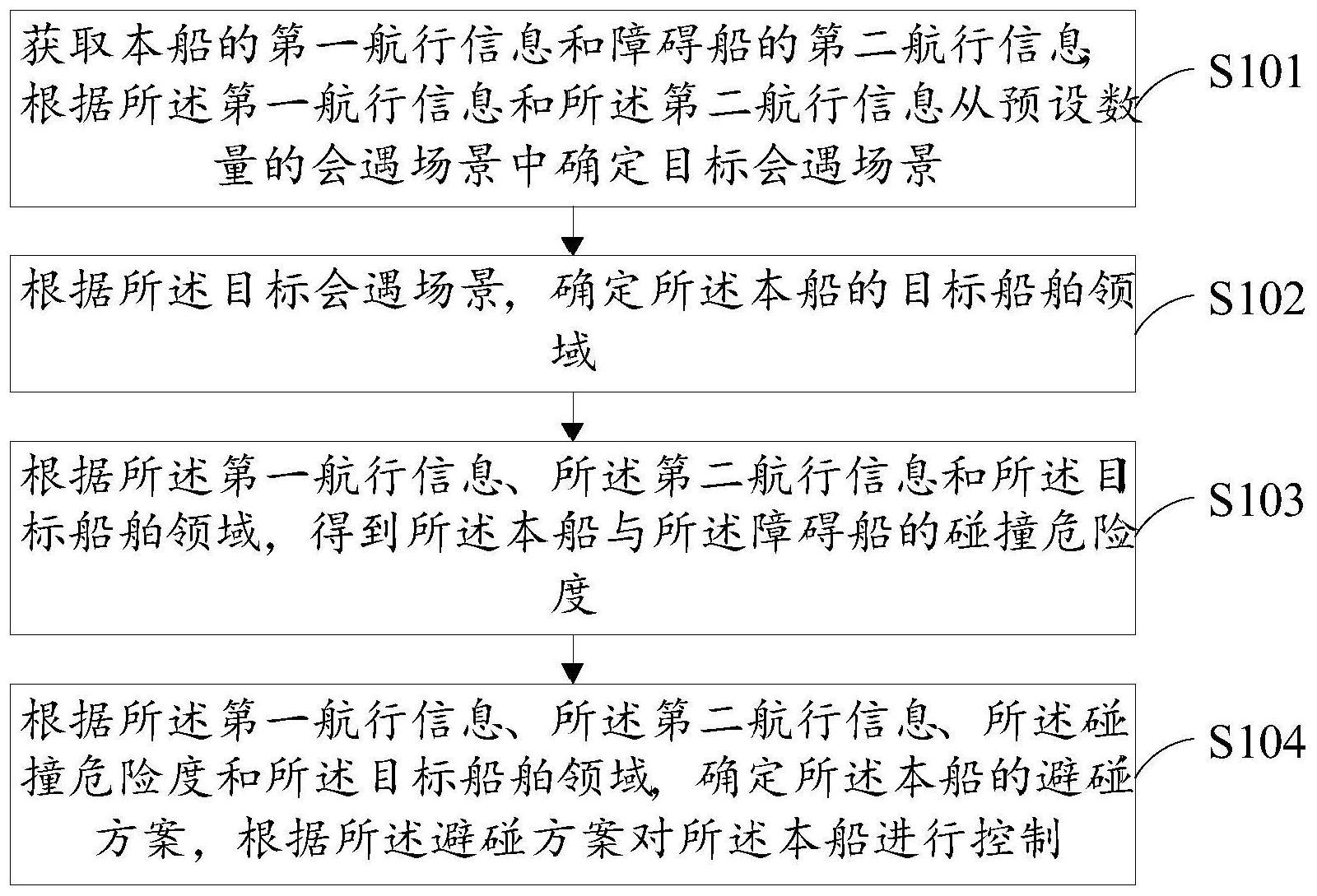
3、获取本船的第一航行信息和障碍船的第二航行信息,根据所述第一航行信息和所述第二航行信息从预设数量的会遇场景中确定目标会遇场景;
4、根据所述目标会遇场景,确定所述本船的目标船舶领域;
5、根据所述第一航行信息、所述第二航行信息和所述目标船舶领域,得到所述本船与所述障碍船的碰撞危险度;
6、根据所述第一航行信息、所述第二航行信息、所述碰撞危险度和所述目标船舶领域,确定所述本船的避碰方案,根据所述避碰方案对所述本船进行控制。
7、在一些可能的实现方式中,所述根据所述第一航行信息、所述第二航行信息和所述目标船舶领域,得到所述本船与所述障碍船的碰撞危险度,包括:
8、根据所述本船和所述目标船舶领域,确定虚拟船的第二航行坐标;
9、根据碰撞危险度模型对所述第一航行信息、所述第二航行信息、所述目标船舶领域和所述目标船舶领域进行计算,得到所述本船与所述障碍船的碰撞危险度。
10、在一些可能的实现方式中,所述第一航行信息包括所述本船的第一航行坐标;
11、所述根据所述本船和所述目标船舶领域,确定虚拟船的第二航行坐标包括:
12、根据所述本船和所述目标船舶领域,确定所述目标船舶领域中虚拟船;
13、根据所述第一航行坐标对所述虚拟船的坐标进行转换,得到所述虚拟船的第二航行坐标。
14、在一些可能的实现方式中,所述根据所述第一航行信息、所述第二航行信息、所述碰撞危险度和所述目标船舶领域,确定所述本船的避碰方案,包括:
15、当所述障碍船为多个时,根据所述本船相对于每个障碍船的碰撞危险度,将所有碰撞危险度的最大值对应的障碍船,确定为目标障碍船;
16、根据所述第一航行信息、所述目标障碍船的所述第二航行信息、所述目标障碍船的所述碰撞危险度和所述本船相对于所述目标障碍船的所述目标船舶领域,确定所述本船的避碰方案。
17、在一些可能的实现方式中,所述碰撞危险度模型的计算公式为:
18、
19、式中,上标t表示当前时刻;下标o和r分别表示本船和障碍船;a、b分别表示椭圆长、短轴长;v、c分别表示航速、航向;(xo,yo)、(x1,y1)、(xr,yr)分别表示本船、虚拟船、障碍船在大地坐标系中的位置;q表示目标船相对本船的舷角,19°表示船舶领域中本船相对虚拟船的偏心角。
20、在一些可能的实现方式中,所述根据所述第一航行信息、所述第二航行信息、所述碰撞危险度和所述目标船舶领域,确定所述本船的避碰方案,包括:
21、根据所述碰撞危险度,判断所述本船与所述障碍船是否存在碰撞危险;
22、若是,则根据所述第一航行信息、所述第二航行信息和所述目标船舶领域,确定当前所处阶段;
23、根据所述当前所处阶段和所述目标会遇场景,确定所述本船的避碰方案。
24、在一些可能的实现方式中,所述根据所述当前所处阶段和所述目标会遇场景,确定所述本船的避碰方案,包括:
25、当所述当前所处阶段为自由行动阶段时,确实控制所述本船自由行动的避碰方案;
26、当所述当前所处阶段为碰撞危险阶段时,根据所述第一航行信息和所述第二航行信息,确定所述本船与所述障碍船的最小会遇时间和会遇距离;根据所述最小会遇时间和所述会遇距离,确定所述目标会遇场景对应的避碰方案;
27、当所述当前所处阶段为紧迫阶段时,根据所述第一航行信息和所述第二航行信息,分别确定所述本船和所述障碍船的避碰方案;
28、当所述当前所处阶段为紧迫危险阶段时,确定所述本船与所述障碍船发送碰撞,采取紧急措施的避碰方案。
29、在一些可能的实现方式中,所述根据所述目标会遇场景,确定所述本船的目标船舶领域,包括
30、根据所述预设数量的会遇场景,设置每个会遇场景对应的所述本船的船舶领域;
31、根据所述目标会遇场景,确定所述本船的目标船舶领域。
32、在一些可能的实现方式中,所述根据所述第一航行坐标对所述虚拟船的坐标进行转换的公式为:
33、
34、式中,a、b分别表示椭圆长、短轴长;rd表示虚拟船沿真实本船船位到船舶领域边界的距离;c0表示本船目标航向;(x0,y0),(x1,y1)分别表示本船、虚拟船在随船坐标系中的坐标。
35、另一方面,本发明还提供了一种基于避碰规则的船舶航行测试装置,包括:
36、信息获取模块,用于获取本船的第一航行信息和障碍船的第二航行信息,根据所述第一航行信息和所述第二航行信息从预设数量的会遇场景中确定目标会遇场景;
37、领域确定模块,用于根据所述目标会遇场景,确定所述本船的目标船舶领域;
38、危险度确定模块,用于根据所述第一航行信息、所述第二航行信息和所述目标船舶领域,得到所述本船与所述障碍船的碰撞危险度;
39、方案确定模块,用于根据所述第一航行信息、所述第二航行信息、所述碰撞危险度和所述目标船舶领域,确定所述本船的避碰方案,根据所述避碰方案对所述本船进行控制。
40、采用上述实施例的有益效果是:获取本船的第一航行信息和障碍船的第二航行信息,根据所述第一航行信息和所述第二航行信息从预设数量的会遇场景中确定目标会遇场景;根据所述目标会遇场景,确定所述本船的目标船舶领域;根据所述第一航行信息、所述第二航行信息和所述目标船舶领域,得到所述本船与所述障碍船的碰撞危险度;根据所述第一航行信息、所述第二航行信息、所述碰撞危险度和所述目标船舶领域,确定所述本船的避碰方案,根据所述避碰方案对所述本船进行控制。本发明通过本船和障碍船的航行信息,对本船与障碍船的目标会遇场景和碰撞危险度进行判断,从而可以判断本船与障碍船是否有碰撞危险,起到对系统的碰撞功能进行测试的作用,还可以通过碰撞危险度、目标船舶领域和目标会遇场景,确定本船的避碰方案,从而可以使本船根据避碰方案进行控制,实现系统的避碰控制,完成基于避碰规则的船舶航行测试,提高船舶航行的安全性。
- 还没有人留言评论。精彩留言会获得点赞!