一种单边侧扫吃水检测系统及方法
本发明涉及船舶航运管理,具体而言,尤其涉及一种单边侧扫吃水检测系统及方法。
背景技术:
1、近些年,随着地方经济的发展,航运业务的普及,内河航运量呈每年递增的趋势,与此同时,船舶超载超吃水的现象也日益突出,为确保通航安全,防止船只在通过航道时在水面下夹带违禁品,航运主管部门要有可靠的手段掌握船舶实际吃水情况,因此有必要建立一套船舶吃水及附着物检测系统。现有的吃水检测系统所需设备复杂维护难度较大,需要多个设备间配合,可靠性较低;现有的附着物检测等方式对人工的依赖较高,不能实现自动化测量,安全性上还有不足。
技术实现思路
1、鉴于现有技术的不足,本发明提供一种单边侧扫吃水检测系统及方法。本发明以计算机视觉理论为基础,以内河通航船舶为应用背景,利用图像声呐设备,获得船舶通航时的状态信息,将吃水测量与附着物检测两种功能结合在一起,提出了一种测量内河通航船舶吃水深度及附着物检测的单边侧扫吃水检测系统。
2、本发明采用的技术手段如下:
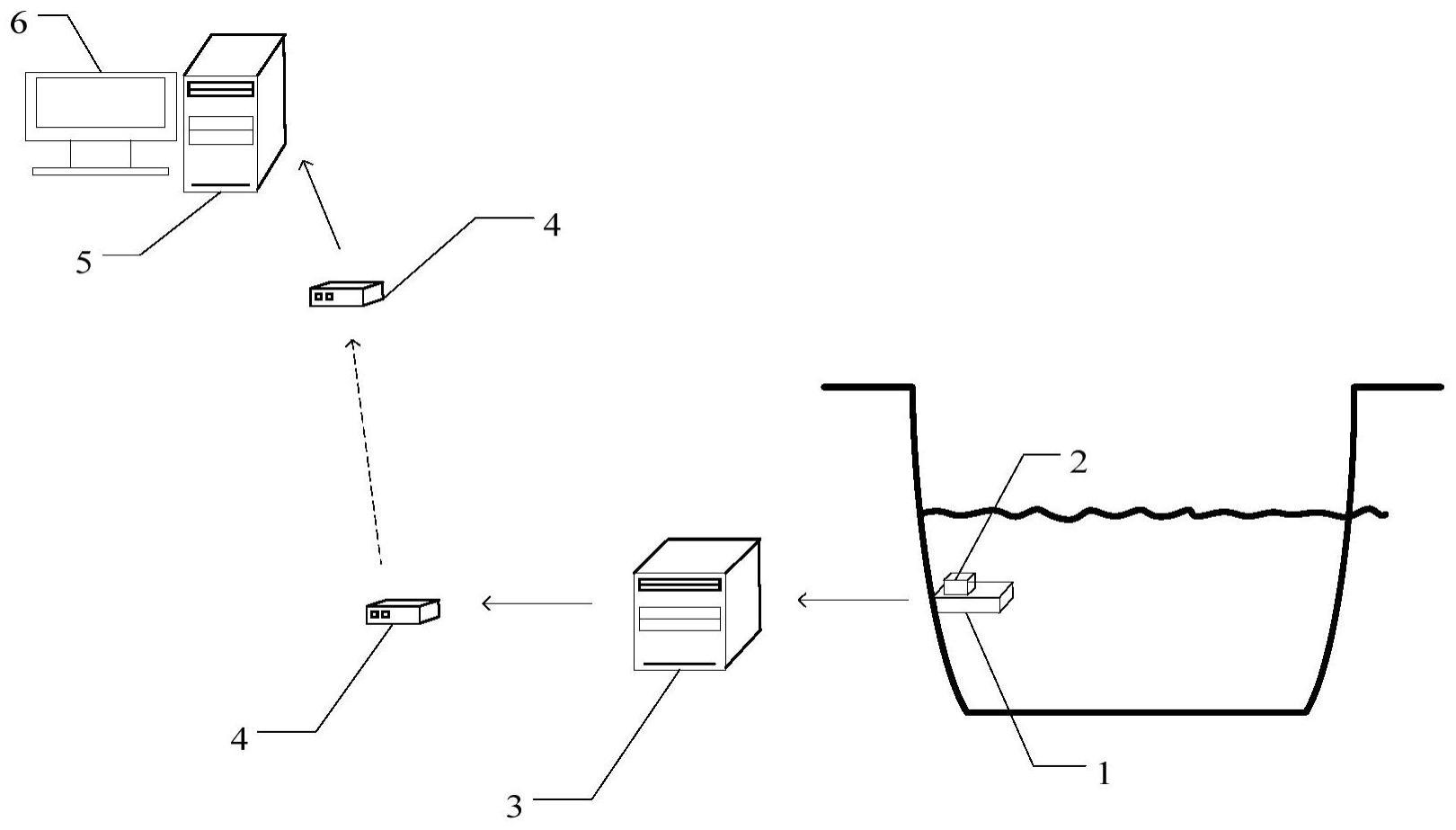
3、一种单边侧扫吃水检测系统,包括:
4、用于收集船舶一侧的水下图像信息的声呐测量模块,所述声呐测量模块安装于航道侧面,声场应能覆盖各类船舶的水下部分;
5、用于定位声呐的测量状态、辅助进行吃水值测算的倾角传感模块,所述倾角传感模块与声呐测量模块并列设置;
6、用于接收声呐测量模块采集的原始声呐图像与倾角传感模块测量的倾角数据的数据采集模块,所述数据采集模块将所述原始声呐图像以及倾角数据收集整理后,发送给远程传输模块;
7、用于实现数据远程传输的远程传输模块;
8、用于进行数据处理的数据处理模块,所述数据处理模块与远程传输模块连接,并对声呐图像进行处理,得出船舶的最大吃水值;
9、用于显示数据处理结果的显示模块,所述显示模块接收数据处理模块得出的吃水数据与实时的声呐图像,并提供相应的人机交互界面,方便在离检测位置较远地方的工作人员掌握实时数据。
10、进一步地,所述数据处理模块结合声呐姿态数据,采用图像识别处理的方式对原始声呐图像进行处理,找到水面与船体最低处在图像中的具体点位,通过图像和倾角数据测出船舶单一截面的吃水值,同一船舶通行时的所有截面按时间顺序排列得到船舶侧面吃水模型,得出船舶的最大吃水值。
11、进一步地,通过调整声呐测量模块和倾角传感模块的测量角度使声场能够覆盖不同船体的侧面。
12、本发明还公开了一种单边侧扫吃水检测方法,基于上述任意一项所述的检测系统实现,包括以下步骤:
13、s1、将前视声呐布置于航道侧面水下,声场应能覆盖各类船舶的水下部分,用于收集船舶一侧的水下图像信息;
14、s2、将倾角传感器与前视声呐安装在一起,检测前视声呐的测量姿态;
15、s3、对声呐传回的图像数据和倾角传感器传回的倾角数据进行收集和整理,传回坝体上方进行数据处理,包括提取特征符合船只侧面轮廓的图片进行初步识别,将每次船只经过时的数据与时间戳分类保存;
16、s4、接收到相应数据后对声呐图像进行识别,图像降噪后对二次反射密集线条识别为水面,识别出船舶侧面的几何图形,确定水面位置、声呐位置以及船舶吃水最大处;
17、s5、根据声呐与船舶吃水最大处的位置关系构建船舶吃水模型,基于所述船舶吃水模型将水面与船舶吃水的垂直坐标差值视为吃水深度;
18、s6、当船舶整体通过测量位置后,声呐将完成对于每个时刻截面船舶吃水值的测量,所有的吃水信息构成了数据集合,从集合中获取最大的数据值,即为初步测量的船舶吃水值。
19、进一步地,根据声呐与船舶吃水最大处的位置关系构建船舶吃水模型,基于所述船舶吃水模型将水面与与船舶吃水的垂直坐标差值视为吃水深度包括:
20、获取水面与船侧面的交点b,水面与视场角边缘的交点a,定义ab为水面,声呐为原点o;
21、若声呐点o高于船舶吃水最大处,船舶在图像中能识别的最低点设为点c,bc高度差即为吃水深,n为过o点的水平线,过b点作水平线n的的垂直线并于d点相交,过c点作水平线n的垂直线并于e点相交,ob长度记为l1,oc长度记为l2,bd长度记为h1,ce长度记为h2;
22、视场中心线记为射线l,视场中心线为l与水平线n的夹角也是倾角传感器测量出的声呐视场中心线相对于水平线的偏转角,记为θ,角度采用上正下负的计量规则,以水平线n为基准,此时若视场中心线l在水平线n上面则角θ为正值,若视场中心线l在水平线n下面则角θ为负值;
23、线段ob与视场角中线夹角为α,线段oc点与视场角中线夹角为β,以视场中心线为l为基准,线段ob、oc在视场中心线为l上面则角α、β为正值,线段ob、oc在视场中心线为l上面则角α、β为负值;
24、则吃水深度为:
25、h=h1+h2=l1·sin(α+θ)+l2·sin(-β-θ)。
26、进一步地,根据声呐与船舶吃水最大处的位置关系构建船舶吃水模型,基于所述船舶吃水模型将水面与船舶吃水的垂直坐标差值视为吃水深度包括:
27、获取水面与船侧面的交点b,水面与视场角边缘的交点a,定义ab为水面,声呐为原点o;
28、若声呐点o低于船舶吃水最大处,在测量如平底船时,图像中能识别的较低点可能有多个,设为c1、c2…cn,n为过o点的水平线,过b点作水平线n的的垂直线并于d点相交,过cn点作水平线n的的垂直线并于en点相交,ob长度记为l1,bd长度记为h1,ocn长度记为ln’,cen长度记为hn’;
29、视场中心线记为射线l,视场中心线为l与水平线n的夹角也是倾角传感器测量出的声呐视场中心线相对于水平线的偏转角,记为θ,角度采用上正下负的计量规则,以水平线n为基准,此时若视场中心线l在水平线n上面则角θ为正值,若视场中心线l在水平线n下面则角θ为负值;
30、线段ob与视场角中线夹角为α,线段ocn点与视场角中线夹角为βn。以视场中心线为l为基准,线段ob、ocn在视场中心线为l上面则角α、βn为正值,线段ob、ocn在视场中心线为l上面则角α、βn为负值;
31、则吃水深度为:
32、h=h1-min(hn’)=l1·sin(α+θ)-min{ln′·sin(β+θ)}。
33、进一步地,所述方法还包括:
34、显示模块通过人机交互界面显示实时的计算结果,给工作人员和检查人员提供更方便的监测方式。
35、较现有技术相比,本发明具有以下优点:
36、1、本发明构建了一种单边侧扫吃水检测系统,与其他吃水检测设备相比,本发明只需要单侧设备就可以进行测量。采用声呐测量船舶吃水,根据角度与距离的关系测出船舶在水下的高度,测算同一船舶通行时的所有截面数据得到吃水值集合,其中吃水最大值作为船舶吃水数据。采用倾角传感器实时监测声呐的姿态,并对吃水值进行校正。
37、2、本发明能够将船只不同时刻的剖面图进行图像融合,得出船只轮廓,再通过图像处理识别出是否存在附着物。
- 还没有人留言评论。精彩留言会获得点赞!