一种水下轻量蝶形仿生作业机器人及其工作方法
本发明属于机器人,具体涉及一种水下轻量蝶形仿生作业机器人及其工作方法。
背景技术:
1、机器人要实现在水下桥墩、海底管道等带曲率的复杂结构物表面作业,或对带曲率的复杂结构物表面的物体进行抓取,前提在于必须稳固的附着在复杂结构物表面上并能根据复杂结构物表面的曲率变化自适应吸附,且需要在携带载荷情况下仍能抵抗外部扰动,这就要求机器人具备较高的吸附力,且具有较强的全向运动及位姿变换能力,既要平稳灵活,又要能实现壁面爬行、转向、自旋运动。
2、不同于地面移动机器人,水下作业机器人受附着、作业工况和自身固有特性的影响,实际应用还存在诸多难题:磁力吸附仅能在导磁的结构物表面附着,对于非磁力的海洋平台的水泥桩基及大桥大坝等壁面不再适用。而常规的负压吸附机器人仅能适用于平整的结构性壁面,现有技术很难应用于含凸起、裂缝或带曲率壁面的非结构性壁面场景。另外,为提高作业灵活性,传统的刚性作业机械臂在水下作业时并不适用,且刚性机械臂无法在狭小、非结构化的空间内灵活作业。
3、申请公布号为cn114986533a的发明专利公开了一种仿象鼻的柔性机械臂及其应用,授权公告号cn217697737u的实用新型专利公开了一种基于可伸缩柔性臂的仿生象鼻机器人。申请公布号cn116161188a的发明专利公开了一种船底附着生物清除机器人及其控制方法,机器人可以游动并且下潜到船体底部的任意位置附近,利用三角形增压喷嘴喷出的高压水流来清除船体底部附着的生物,高压水管的输出端与高压喷头之间设有八自由度象鼻式机械臂,然而机器人在作业时与船体之间并无连接固定,受水流作用机器人容易出现位置偏移,稳定性差,八自由度象鼻式机械臂不能实现全向灵活运动作业,作业灵活性差。
技术实现思路
1、本发明的一个目的在于提供一种整体水阻更小、全向全姿态灵活运动、吸附能力更强、适用范围广的水下轻量蝶形仿生作业机器人。
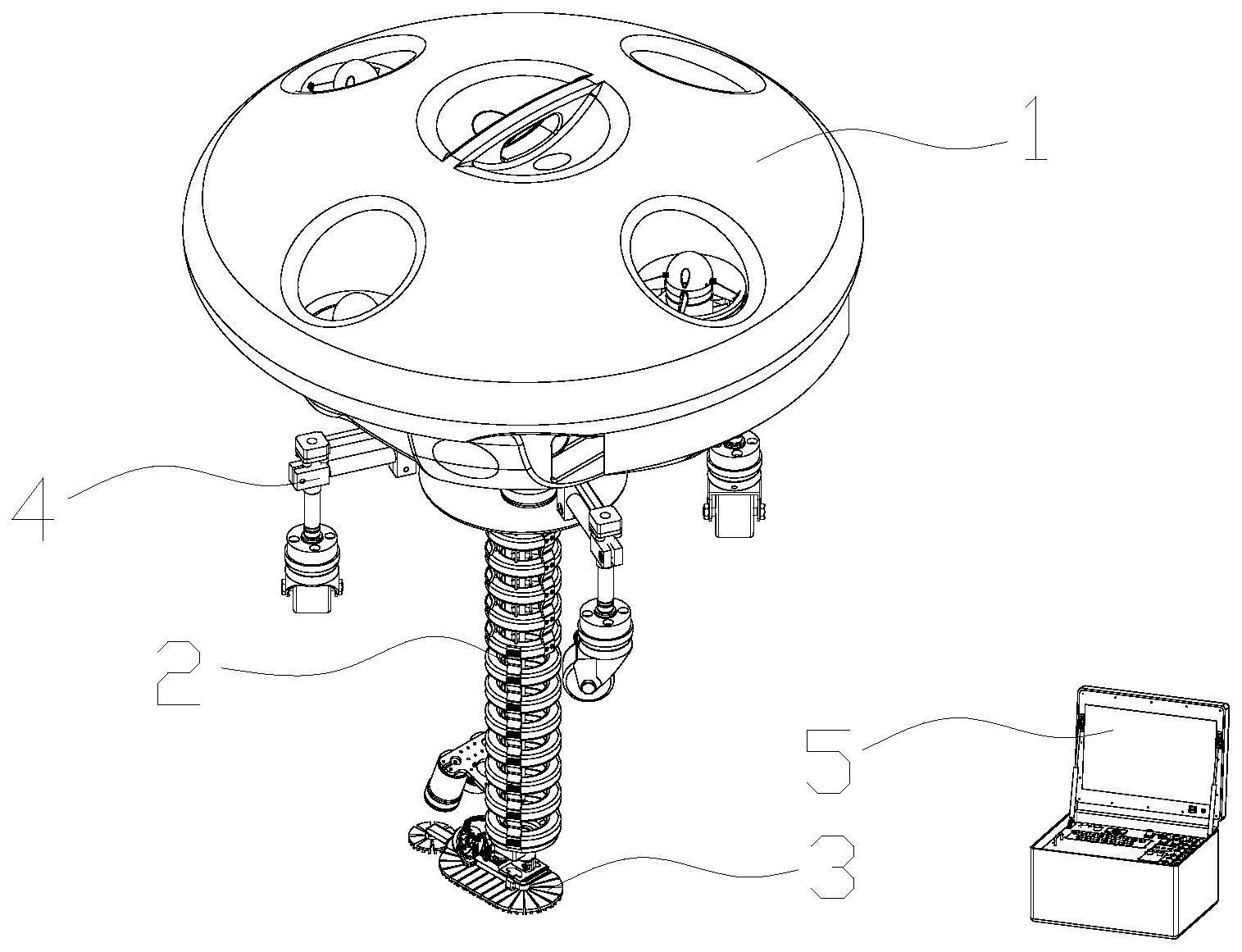
2、本发明解决其技术问题所采用的技术方案是:一种水下轻量蝶形仿生作业机器人,包括:
3、蝶形全姿态运动本体,是机器人运动的载体,用于安装并控制仿象鼻机械臂、自适应负压吸附系统和作业方位变换组件;
4、仿象鼻机械臂,安装于蝶形全姿态运动本体下方,用于调整机器人的空间位置和姿态控制;
5、自适应负压吸附系统,设置于仿象鼻机械臂的底端,用于与仿象鼻机械臂配合实现对复杂非结构性物体进行自适应吸附抓取;
6、作业方位变换组件,设置于蝶形全姿态运动本体和仿象鼻机械臂之间,采用水密转台形式,实现自适应负压吸附系统和仿象鼻机械臂相对蝶形全姿态运动本体之间的转动;
7、岸站控制台,设置于岸边或母船上,岸站控制台与蝶形全姿态运动本体电气连接。
8、进一步地,所述蝶形全姿态运动本体包括密封壳体、水平推进器、垂向推进器、载荷安装盘、控制通讯和能源模组,水平推进器横向设置于密封壳体的下方,密封壳体上均匀分布有若干上下贯通的流道,每个流道内设有一组垂向推进器,控制通讯和能源模组设置于密封壳体的内部,控制通讯和能源模组与岸站控制台电气连接,控制通讯和能源模组用于为机器人提供能源并与岸站控制台之间通讯控制连接,载荷安装盘安装于密封壳体的底部,载荷安装盘与作业方位变换组件连接,密封壳体的顶部设有顶视摄像避障模组,密封壳体的底部下视摄像避障模组,密封壳体的前侧设有前视摄像避障模组,密封壳体的后侧设有后视摄像避障模组,水平推进器、垂向推进器、前视摄像避障模组、后视摄像避障模组、下视摄像避障模组、顶视摄像避障模组分别与控制通讯和能源模组电气连接。
9、优选的,所述水平推进器设有两组,对称设置于密封壳体的下方,垂向推进器设有四组,均匀分布于密封壳体上,且其中两组垂向推进器分别位于两组水平推进器的上方,水平推进器外侧的密封壳体上设有垂向设置的双翼喷嘴管路,双翼喷嘴管路与对应的流道连通。
10、进一步地,所述仿象鼻机械臂包括基座、大臂驱动舵机组、小臂驱动舵机组、大臂拉绳、小臂拉绳、大臂骨架、小臂骨架、大臂弹性元件、小臂弹性元件,大臂骨架沿垂向方向设有多个,大臂骨架的外周通过若干均匀分布的大臂弹性元件连接,最上端的大臂骨架固定连接于基座的底面上,小臂骨架设置于大臂骨架的正下方,小臂骨架沿垂向方向设有多个,小臂骨架的外周通过若干均匀分布的小臂弹性元件连接,小臂弹性元件的顶部固定连接于最下端的大臂骨架的外周上,基座的外周固定安装有相同数量的大臂驱动舵机组和小臂驱动舵机组,大臂驱动舵机组和小臂驱动舵机组均与控制通讯和能源模组电气连接,大臂驱动舵机组和小臂驱动舵机组依次间隔均匀分布,每个大臂驱动舵机组的顶部安装有大臂绕线驱动组件,大臂绕线驱动组件与大臂驱动舵机组的输出轴连接,每个小臂驱动舵机组的顶部安装有小臂绕线驱动组件,小臂绕线驱动组件与小臂驱动舵机组的输出轴连接,基座的顶面上均匀分布有若干导向滑轮,导向滑轮与大臂绕线驱动组件和小臂绕线驱动组件的数量相同且位置对应,大臂绕线驱动组件与大臂拉绳的一端连接固定,大臂拉绳的另一端绕过导向滑轮并由上到下依次穿过大臂骨架后与最下端的大臂骨架连接固定,小臂绕线驱动组件与小臂拉绳的一端连接固定,小臂拉绳的另一端绕过导向滑轮并由上到下依次穿过大臂骨架、小臂骨架后与最下端的小臂骨架连接固定。
11、进一步地,所述自适应负压吸附系统包括固定基座、连接法兰、连接支板、垂向延展臂、第一圆形柔性吸附盘、第二柔性吸附板、第一吸附流道、第二吸附管件、第二吸附管路、吸附泵、第一吸附推进器、推进器固定支架,固定基座固定安装于仿象鼻机械臂的底部,固定基座的底部通过连接法兰与连接支板连接,连接支板与垂向延展臂的上端固定连接,垂向延展臂的下端与第二柔性吸附板的顶部连接固定,第二柔性吸附板的顶部还连接有第二吸附管件,第二吸附管件通过第二吸附管路与吸附泵连接,吸附泵安装于蝶形全姿态运动本体内的载荷安装盘上,载荷安装盘的底部设有吸附泵的排水口,第一圆形柔性吸附盘设置于第二柔性吸附板的前方,第一圆形柔性吸附盘的顶部通过第一吸附流道与第一吸附推进器连接固定,第一吸附推进器通过推进器固定支架固定连接于第二柔性吸附板的顶部,吸附泵、第一吸附推进器分别与控制通讯和能源模组电气连接。
12、优选的,所述自适应负压吸附系统还包括作业辅助传感器,作业辅助传感器固定连接于仿象鼻机械臂的下端侧面,作业辅助传感器与控制通讯和能源模组电气连接,第二吸附管路穿过仿象鼻机械臂内部与吸附泵连接。
13、进一步地,所述作业方位变换组件包括固定法兰、变换驱动电机、旋转底座、支撑座、横向支臂、加固组件、垂向支臂、级联固定座、万向轮、机械臂电机保护壳、转轴,横向支臂设有多个,横向支臂的一端与垂向支臂的顶端连接,垂向支臂的底端过级联固定座与万向轮连接,横向支臂与垂向支臂之间还连接有加固组件,横向支臂的另一端通过支撑座固定连接于变换驱动电机的侧壁上,支撑座在变换驱动电机的侧壁上均匀分布,变换驱动电机与控制通讯和能源模组电气连接,变换驱动电机的顶部通过固定法兰固定连接于载荷安装盘上,变换驱动电机底部的输出轴与转轴连接固定,转轴上固定安装有旋转底座,旋转底座的下端面固定连接于机械臂电机保护壳的顶部,基座、大臂驱动舵机组以及小臂驱动舵机组设置于机械臂电机保护壳内,基座固定安装于保护壳的底面上。
14、进一步地,所述岸站控制台包括显示器、操纵组件、壳体,显示器、操纵组件设置于壳体上部,壳体内设有主机和能源模块,能源模块为岸站控制台提供能源,主机与显示器、操纵组件以及控制通讯和能源模组电气连接。
15、本发明的另一目的在于提供水下轻量蝶形仿生作业机器人的工作方法,包括以下步骤:
16、1)机器人初始静置状态变换步骤:
17、蝶形全姿态运动本体水平放置,仿象鼻机械臂的大臂驱动舵机组和小臂驱动舵机组动作,分别带动大臂绕线驱动组件和小臂绕线驱动组件转动,进而带动大臂拉绳和小臂拉绳分别缠绕在大臂绕线驱动组件和小臂绕线驱动组件上,拉动大臂骨架和小臂骨架在大臂弹性元件和小臂弹性元件的支撑下向上收缩,进一步带动自适应负压吸附系统向上运动,通过分别控制大臂驱动舵机组、小臂驱动舵机组动作,仿象鼻机械臂和自适应负压吸附系统上升盘绕到蝶形全姿态运动本体下方的作业方位变换组件内,作业方位变换组件的万向轮与壁面接触起支撑作用。
18、2)机器人入水全向运动工作步骤:
19、机器人按照步骤1)变换至初始静置状态,此时,仿象鼻机械臂和自适应负压吸附系统上升盘绕到蝶形全姿态运动本体下方的作业方位变换组件内,作业方位变换组件的万向轮与壁面接触,通过分别控制蝶形全姿态运动本体的水平推进器和垂向推进器动作,配合前视摄像避障模组、后视摄像避障模组、下视摄像避障模组、顶视摄像避障模组,机器人实现前进、后退、升沉、俯仰、横滚和艏摇全向作业。
20、3)机器人入水抓取搬运工作步骤:
21、机器人按照步骤2)全向运动至待作业区域,蝶形全姿态运动本体控制悬停作业,仿象鼻机械臂垂向伸展,仿象鼻机械臂的大臂驱动舵机组和小臂驱动舵机组动作,进而带动自适应负压吸附系统运动至待抓取物处,岸站控制台控制自适应负压吸附系统对待抓取物进行吸附,配合下视摄像避障模组及作业辅助传感器完成精准抓取吸附。
22、4)机器人负压吸附作业步骤:
23、通过基于伯努利方程的负压吸附原理,根据需要,自适应负压吸附系统的吸附泵动作,第二柔性吸附板对结构物壁面进行可靠自适应吸附,第一吸附推进器动作,第一圆形柔性吸附盘对结构物壁面进行可靠自适应吸附,配合仿象鼻机械臂实现精准灵活吸附,不仅对导磁或非导磁,光滑、粗糙、带凸起、裂缝、平面或有曲率的物体吸附,而且能使机器人吸附在结构物表面进行驻停作业。
24、5)机器人壁面爬行作业步骤:
25、当机器人入水全向运动时,机器人还能控制其自身变换为垂直姿态,采用作业方位变换组件的万向轮接触水下结构物的壁面,垂向推进器动作,将机器人向壁面方向压紧,使机器人紧贴于壁面,水平推进器动作,配合前视摄像避障模组、后视摄像避障模组、下视摄像避障模组、顶视摄像避障模组,实现机器人在壁面上爬行运动,控制两组水平推进器相反运动,实现机器人在壁面上的自旋运动。
26、本发明具有以下有益效果:
27、本发明的水下轻量蝶形仿生作业机器人采用蝶形机构布局,整体水阻更小、运动性能更强;六组推进器结构实现机器人本体全向全姿态灵活运动;两侧双翼喷嘴管路的布局方式,使垂向和水平运动近乎零耦合,运动更加灵活、机动特性更强;仿生式象鼻式后置驱动的连续机械臂构型,使水下执行机构自适应负压吸附系统自由度更多、结构简单、负载能力更强;基于伯努利方程的柔性自适应负压吸附系统,摆脱了现有磁吸附、真空吸附等对附着面的结构化要求,适用范围和吸附力更强。
28、本发明蝶形全姿态运动本体突破了的rov轻量化下的全向运动,克服了现有rov系统中全向运动平台依赖的推进器数量多、推进器数量少的机器人运动性能弱和模态少的缺陷,实现水中全方位灵活机动运动,适用于更加恶劣、狭小等非结构性工况作业环境。轻量灵活型连续仿象鼻机械臂除了应用在水下对需要抓取的物体进行精准高效抓取外,还可以应用于其他陆上等连续、精准和小空间抓取的场景。高性能自适应负压吸附系统可以应用在其他领域需要对非导磁、非结构性等复杂的物体进行无损抓取,这种基于柔性的负压吸附同样可应用于基于空气为介质的抓取场景。
29、本发明水下轻量蝶形仿生作业机器人主要具备水下综合作业能力,实现水下全域全姿态水下探测、巡检和作业,其中作业包括:水下机器人寻找海产养殖区、投放饲料、按规定路径巡检水下结构物、采集海床落物、海底探测仪器供电并启动等,技术潜力大,市场应用前景广阔,可进行规模化推广,为人类进入海洋从事各种海洋产业活动提供技术支撑和装备保障。
- 还没有人留言评论。精彩留言会获得点赞!