一种基于雷达识别和神经网络算法的水下救援机器人
本发明涉及水下救援机器人,具体涉及一种基于雷达识别和神经网络算法的水下救援机器人。
背景技术:
1、
2、水下救援工作十分重要,溺水人员在水中由于恐慌害怕等心理因素会导致挣扎、呼吸困难和心跳血压急剧上升等情况,大多数人溺水五分钟后就会有生命危险,溺水时间一旦超过25分钟就几乎接近100%死亡,所以发生溺水时,保证溺水人员供氧,争取抢救时间是第一要紧的事情;现在的溺水救援工作,较为困难的情况存在于复杂的溺水环境;例如城市下水管道、天然涵洞和山间溪流中,这种情况下救援人员需要更长的准备时间以保证救援人员自身的安全和救援成功率,但溺水者在水下呼吸困难,时间越长,溺水者的生命安全就越难保证;
3、此时,水下救援机器人就可以发挥重要作用;水下救援机器人可以先一步的进入水下,对溺水者进行初步供氧急救处理,也可以进一步地探知水下环境,保证后续救援的成功率;由于需要携带探测装备、动力装置以及急救用具,救援机器人的体型往往较为大,不利于穿梭在复杂的水下环境,不能通过最快的路径赶到溺水者身边,从而耽误黄金救援时间。
4、鉴于以上情况,为了克服上述技术问题,本发明设计了一种基于雷达识别和神经网络算法的水下救援机器人,解决了上述技术问题。
技术实现思路
1、本发明所要解决的技术问题是:在溺水救援的过程中,面对一些复杂狭隘的水下环境,救援人员不能第一时间通过最短路线进行救援,需要更多的准备时间和寻找最佳路径,但溺水者的救援时间不容浪费,急需对溺水者进行初步急救供氧援助。
2、为了实现上述目的,本发明提供如下技术方案:
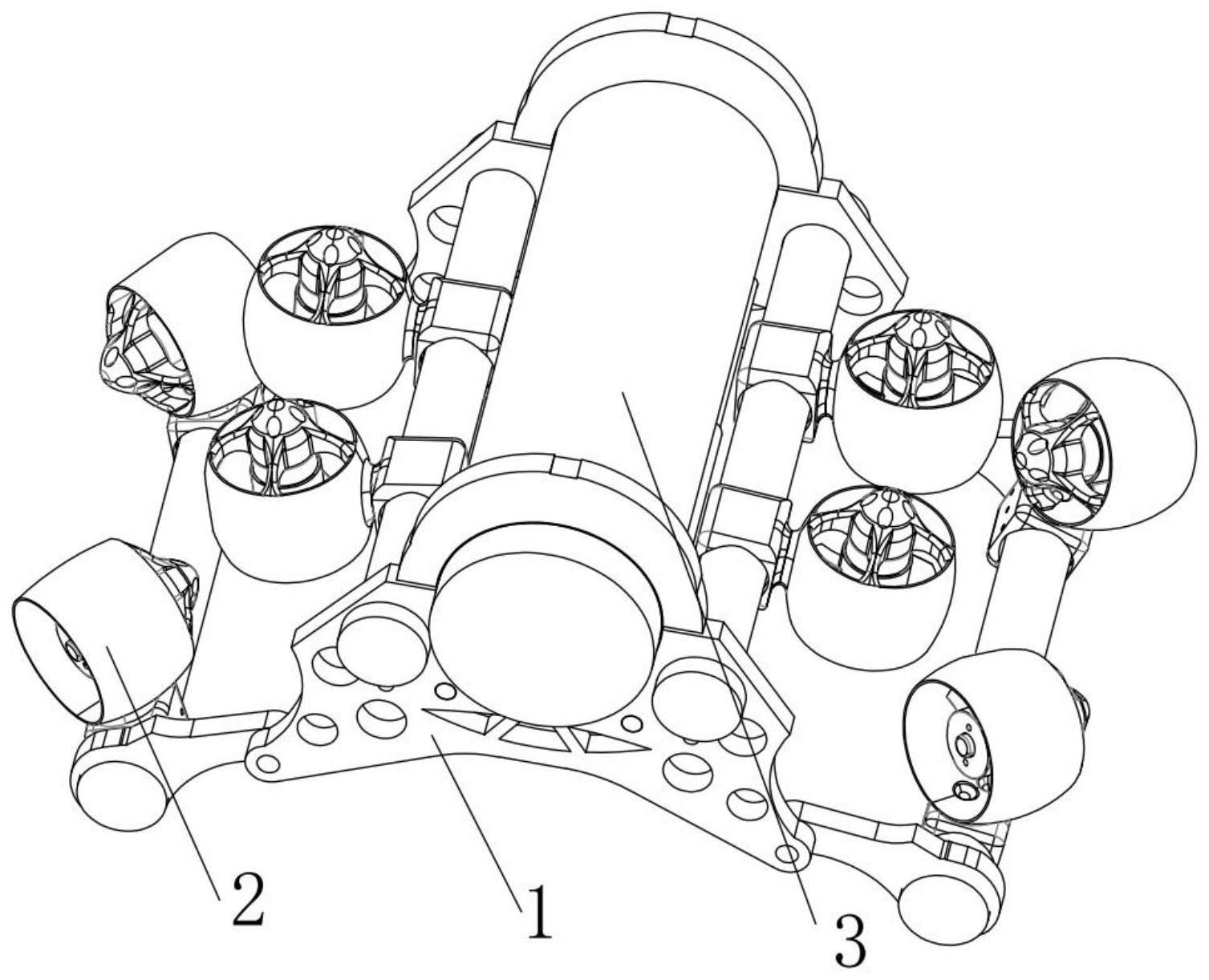
3、本发明提供的一种基于雷达识别和神经网络算法的水下救援机器人,包括变形支撑机构、动力机构、伸缩机构和急救装置;所述变形支撑机构用于通过改变自身形状大小从而方便进入狭隘环境,减少救援时间;所述变形支撑机构设置为两种状态,即为了获得较大动力从而加快速度的展开型和为了快速通过狭隘路径而实现缩短救援时间的缩小型;
4、所述变形支撑机构上安装有多个动力机构,所述动力机构用于通过高速旋转的桨叶利用流体力学原理中流速不同产生推动力带动水下救援机器人运动:螺旋桨推进器是现代社会中一种常见的船舶和飞机推进装置,它基于液体或气体的运动原理来产生推力,通过旋转螺旋桨来移动周围的液体,当螺旋桨旋转时,叶片将推动流体向后移动,根据牛顿第三定律,推动流体向后的力将产生一个等量但方向相反的推力作用在推进器上,从而实现所述变形支撑机构在所述动力机构的推动下快速运动至指定位置;不同角度设置的所述动力机构通过不同速度的转动实现对所述水下救援机器人进行任意方向的移动,所述动力机构设置为两种功能,即上下方向的推进和前后左右方向的调整,每个动力机构都有独立驱动功能,在复杂狭隘的水下环境中,面临可能出现的个别所述动力机构损坏的情况也可以保证工作状态,从而保证工作稳定性;
5、雷达识别需要更广阔的视野,从而才能保证探索完整性质;所述伸缩机构固定安装在所述变形支撑机构的上部中间处,安装方式设置为焊接和粘接,所述伸缩机构通过雷达识别配合神经网络算法对水下复杂的环境进行分析从而选择相对优选的方案进行运动,在水下工作时使用雷达识别功能可以用来进行测距和定位,帮助确定目标物体的位置和距离。通过发送脉冲信号并接收返回的信号,通过神经网络算法计算出信号的往返时间,从而确定目标物体与雷达的距离,神经网络算法是一种模仿了生物神经系统中神经元之间的连接和信息传递方式,通过多层次的神经元网络来学习和处理数据,这些算法通常使用梯度下降等优化方法来训练神经网络,通过调整网络的权重和偏置来最小化损失函数。神经网络算法在图像识别、自然语言处理、语音识别等领域有显著作用,应用在水下救援工作中,可以对雷达识别单元反馈的信号进行快速处理,从而完成快速计算下达指令;所述急救装置固定安装在所述变形支撑机构下方,安装方式设置为卡扣安装和磁吸安装,值得说明的是,所述急救装置用于给予溺水者最基本的氧气供氧以保证其生命安全,从而进一步争取更多的救援时间,所以所述急救装置的安装方式应该采用拆卸较为方便的方式,从而保证在水下环境中,可以轻松地完成拆卸工作,从而保证溺水者可以尽快地使用所述急救装置,保证生命安全。
6、完成展开型向缩小型的改变主要依靠于变形支撑机构,所述变形支撑机构包括安装板、固定杆、定位孔、溢流孔、转动孔、转动销、活动元件和安装杆;所述安装板设置为2个,所述安装板平行设置,所述固定杆固定安装在2个平行的所述安装板之间,所述固定杆设置有两个,安装方式设置为焊接和螺栓安装,所述定位孔开设在所述安装板上,所述定位孔的半径设置为10-12cm,所述定位孔用于安装所述动力机构;所述安装板上开设有多个溢流孔,所述溢流孔用于在救援机器人工作运动的过程中,使得水可以从溢流口进出从而减小水流阻力,所述溢流孔的形状设置为圆形和多边形,圆形和多边形的设置有利于更加合理地分配安装板空间,同时可以加强安装板结构;所述溢流孔设置为网状拓扑结构,网状拓扑结构的优点是冗余性较高,保证整个结构足够稳定,在水下运动中遭受撞击时可以稳定整体从而保证内部精密零件正常工作;所述转动孔开设于所述安装板两侧最下方,所述转动孔的半径设置为3-4cm,以此适配所述转动销,由于转动销的转动幅度较大,所以需要较大的半径来实现支撑;所述转动孔的表面粗糙度设置为ra1.2-0.8,转动运动过程中,所述转动销和所述转动孔的摩擦力较大,容易造成磨损导致零件损坏,其解决方式为提高所述转动孔的表面粗糙度等级,从而减小摩擦力,ra1.2-0.8的表面粗糙度即可满足该种转动运动的日常使用磨损;所述转动销转动安装在所述转动孔内,其侧面设置有矩形凸起块,所述矩形凸起块用于加强所述转动销的安装稳定性,所述凸起块两侧设置为锯齿状用于加固所述凸起块和所述转动孔之间横向位移的限制,从而在转动的过程中提供更大的力矩,以克服水中的流体阻力;所述活动元件转动安装在所述转动销的另一端,所述安装杆固定安装在所述活动元件内,安装方式设置为卡紧安装和螺栓安装。
7、针对活动元件的设计是整个变形支撑机构的重点,所述活动元件内侧设置为圆弧形,圆弧形的结构设置有利于所述活动元件在转动缩小的过程中提高稳定性,在展开型的工作状态下圆弧形可以避免在和水中杂物的接触中造成进一步的碰撞;所述活动元件的转动角度设置为0-120°,该范围内所述活动元件可以完成所述变形支撑机构的两种形态的转变,所述活动元件开设有通孔,所述通孔用于和所述转动销进行配合转动,所述通孔直径为所述活动元件长度的1/4,这种长度设置下的所述活动机构可以在转动的过程中不对所述活动板进行进一步的影响,从而保证所述活动元件的转动过程更加简洁快速。
8、动力机构负责在复杂的水下环境为救援机器人提供动力支持,所述动力机构包括正向安装元件、斜方位安装元件、安装槽口、推进器外壳、安装凸块、无刷电机和螺旋元件,所述正向安装元件和斜方位安装元件固定安装在所述变形支撑机构上,安装方式设置为卡紧安装和螺纹安装,所述正向安装元件上方平行开设有安装槽口,所述斜方位安装元件上方倾斜45°开设有安装槽口,两种不同的安装槽口分别对于不同作用的所述推动器外壳;所述推进器外壳固定安装在所述正向安装元件和所述斜方位安装元件上,安装方式设置为卡紧安装和螺栓安装,通过所述安装槽口进行安装;所述推进器外壳后侧设置为十字结构,十字结构的强度较为可靠,且有四个区域可以用来进水,在保证结构强度的同时尽可能的设置最大的进水面积,以此来保证运动效率;所述推进器外壳下固定安装有所述安装凸块,安装方式设置为焊接和一体式铸造;所述安装凸块的侧面设置为曲面,其曲率半径设置为3cm-1,该曲率下所述安装凸块和所述推进器外壳连接面较为光滑,其连接处无缝隙,有利于防止其内部电子元件进水从而导致失灵;所述无刷电机固定安装在所述推进器外壳中间,安装方式设置为粘接和卡扣安装,所述螺旋元件固定安装在所述无刷电机上,所述螺旋元件设置为中空结构,中空结构用于包裹所述无刷电机从而实现对其的防水保护作用。
9、正向安装元件和斜方位安装元件的作用并不相同,所述正向安装元件设置为4-6个,所述正向安装元件对称安装在与所述定位孔配合的所述安装杆上,对称设计有利于整个救援机器人的运动平稳性,保证其受力均匀从而运动方向也会较为准确,安装位置设置为所述安装杆上2/5和3/5处,在较为靠近中心的地方设置按所述正向安装元件有利于动力的集中,实现更好地推动效果;所述正向安装元件绕所述安装杆旋转的角度设置为0-70°,绕所述安装杆进行旋转是为了配合所述活动元件进行变形从而通过狭隘的环境;所述斜方位安装元件设置为4个,4个所述斜方位安装元件正好对应对角线四个方向,所述斜方位安装元件呈镜面对称安装在所述活动元件配合的所述安装杆上,镜面对称设置的所述斜方位安装元件可以实现多角度多方向的调整,安装位置设置为所述安装杆上1/5和4/5处,为了避免在变形过程中和所述正向安装元件上的推进器外壳产生影响,也为了更好地方向调整效果,同一侧的2个所述斜方位安装元件开口朝向相反,从而满足360°的方向调整。
10、在面对复杂的水下环境中,需要雷达识别配合神经计算网络进行分析,所述伸缩机构包括雷达单元、伸缩杆、矩形滑动块、推进电机、触发杆、矩形滑槽和伸缩套;所述伸缩套固定安装在所述支撑变形机构上部分1/3处,设置在1/3处有利于扩大所述雷达单元的检测范围,所述伸缩杆滑动安装在所述伸缩套中,所述伸缩杆的长度设置为所述伸缩套的0.8-0.9倍;从而实现在两侧都留有一定空间在所述伸缩杆进行伸缩的过程中,不会触碰到所述伸缩套的内壁,避免造成损坏;所述伸缩杆上固定安装有所述矩形滑动块,所述触发杆滑动安装在所述伸缩杆上,所述触发杆的长度设置为所述伸缩杆直径的2-2.5倍,以此实现所述触发杆可以通过上下移动带动所述伸缩杆实现伸缩工作;所述触发杆上开设有矩形滑槽,所述矩形凹槽适配于所述矩形滑动块;所述推进电机固定安装在所述触发杆上,所述推荐电机通过上下推动实现所述触发杆的运动;所述雷达单元固定安装在所述伸缩杆一端,安装方式设置为螺栓安装和卡扣安装。
11、矩形滑动块为伸缩机构中的重要一环,所述矩形滑动块设置在所述伸缩杆靠近所述雷达单元1/3至2/3处,此区域位于相对中间位置,对于整个伸缩杆的影响较小,不会因为伸长而导致不能通过某些狭小环境,所述矩形滑动块和水平面倾斜角设置为30-45°,该角度范围内可以实现所述触发杆下降即可实现所述伸缩杆的快速伸缩;所述矩形滑动块长宽比例设置为6-8,有利于加强所述矩形滑动块的结构稳定性,在配合所述矩形滑槽滑动的运动过程中,提高抗扭矩强度。
12、急救装置中装备有氧气面罩,用于给溺水者提供氧气支撑,从而为救援工作争取宝贵的救援时间,所述急救装置包括安装孔、装置外壳、输气管和氧气面罩,所述装置外壳通过所述安装孔固定安装在所述安装杆上1/3处,安装方式设置为焊接和粘接,所述装置外壳内部为中空结构,所述氧气面罩可拆卸安装在所述装置外壳内,安装方式设置为磁吸安装和卡扣安装,其拆卸触发力设置为200-300n,所述输气管一端固定安装在所述氧气面罩上,安装方式设置为螺纹安装和卡扣安装,所述氧气面罩设置有三点式固定弹性绑带,三点式固定有利于提升稳定性,三点式固定提供了更高的稳定性和支撑能力。通过将物体固定在三个点上,可以有效地平衡重量和力的分布,防止所述氧气面罩倾斜或移动导致氧气面罩脱落使得溺水者有生命危险,所述输气管另一端固定安装在所述装置外壳内部。
13、本发明的有益效果如下:
14、1.本发明通过设置变形支撑机构,对救援机器人的整体结构实现两种状态的变化,针对狭隘环境缩小体积从而可以选择最优选的路径进行救援;通过缩小体积还可以在很多救生员无法直接救援的环境下进行探测和初步急救工作;而在宽广的环境下,通过雷达识别配合神经网络算法进行智能路径计算;变形支撑机构体积变大导致动力机构和水的接触面积变大,使得移动速度变快,进一步缩短救援时间。
15、2.本发明通过设置动力机构和伸缩机构,在正向安装元件和斜方位安装元件配合螺旋元件实现不同方向以不同的速度运动,从而改善救援机器人的灵活性,伸缩机构可以加强雷达识别的范围和准确性,使其在复杂的环境下可以下达准确的指令并配合动力机构轻松地完成变向、加速和急停东站,可以在避免水中的杂物对救援机器人的损害的同时尽可能的快速到达溺水者周围,为后续救援工作争取时间。
- 还没有人留言评论。精彩留言会获得点赞!