一种内藏式可回收的无人潜航器作业系统
本发明属于一种无人,具体是一种内藏式可回收的无人潜航器与垂直起降固定翼无人机相互协同作业系统。
背景技术:
1、随着电子技术和计算机的迅速发展,自动化技术得以进一步演进。传感器、机器视觉、人工智能等技术的出现和进步,使得机械设备可以感知环境、做出决策和执行任务,实现更高级别的自动化。企业和组织在面对全球竞争和成本压力时,将寻求提高效率和降低成本的方式。无人化可以通过减少人力资源需求和提高生产效率来应对这些挑战。某些环境对人类来说可能过于危险、困难或繁琐,所以需要依赖无人化技术来完成任务。例如,深海勘探、太空探索、核能和化工等领域需要无人系统作业和监测。无人机作为一种新式的无人化的智能平台,具有高度的机动性和环境适应性,无人机可以快速部署和执行任务,无需人类进行手动操作,它们可以在较短的时间内完成大量工作,提高生产效率或进入相对难到达的地方,如灾区、悬崖、火山口等,执行任务而无需将人置于危险中。无人机具备高效、灵活和成本节约等优点,能够在许多领域中担当重要角色,提供各种服务和解决方案。
2、有缆无人潜航器(rov)通过一条电缆与操作站点进行连接,电缆提供了电力供应和数据传输通道。操作员可以通过电缆远程操控和监控rov的行动。rov通过一条电缆与操作站点进行连接,电缆提供了电力供应和数据传输通道。操作员可以通过电缆远程操控和监控rov的行动,相比与无线潜航器其信号更加不易丢失,在民用领域运用其探测水文,深海考古、海洋科学研究和海底设施检测等有重要运用。
3、无人机与有缆潜航器相结合形成一种相互协同作业系统已然成为一个痛点,本发明提出一种内藏式可回收的无人潜航器作业系统,并对无人机与有缆潜航器进行了部分设计。
技术实现思路
1、本发明的目的在于提供一种高效率的水空一体化的作业系统。
2、基于上述目的,本发明采用如下技术方案:
3、一种内藏式可回收的无人潜航器作业系统,包括地面端计算机及通讯模块、垂直起降固定翼无人机、机体内置密封舱、密封舱内置部件(双线程独立传动机构、双储存笼、双潜航器及双潜航器笼)。所述系统;计算机与垂直起降固定翼无人机通过通讯系统相连接,无人机机翼下方布置对称船型浮筒,无人机机体下置舱门,机体内置密封舱,密封舱内置部件;双线程独立传动机构下方布置双储存笼,双储存笼下方布置双潜航器笼及双潜航器,潜航器设置在潜航器笼内,双线程独立传动机构中的两绞车线分别穿过双储存笼进入双潜航器笼分别与潜航器连接,线缆可提供拉力和传输数据。
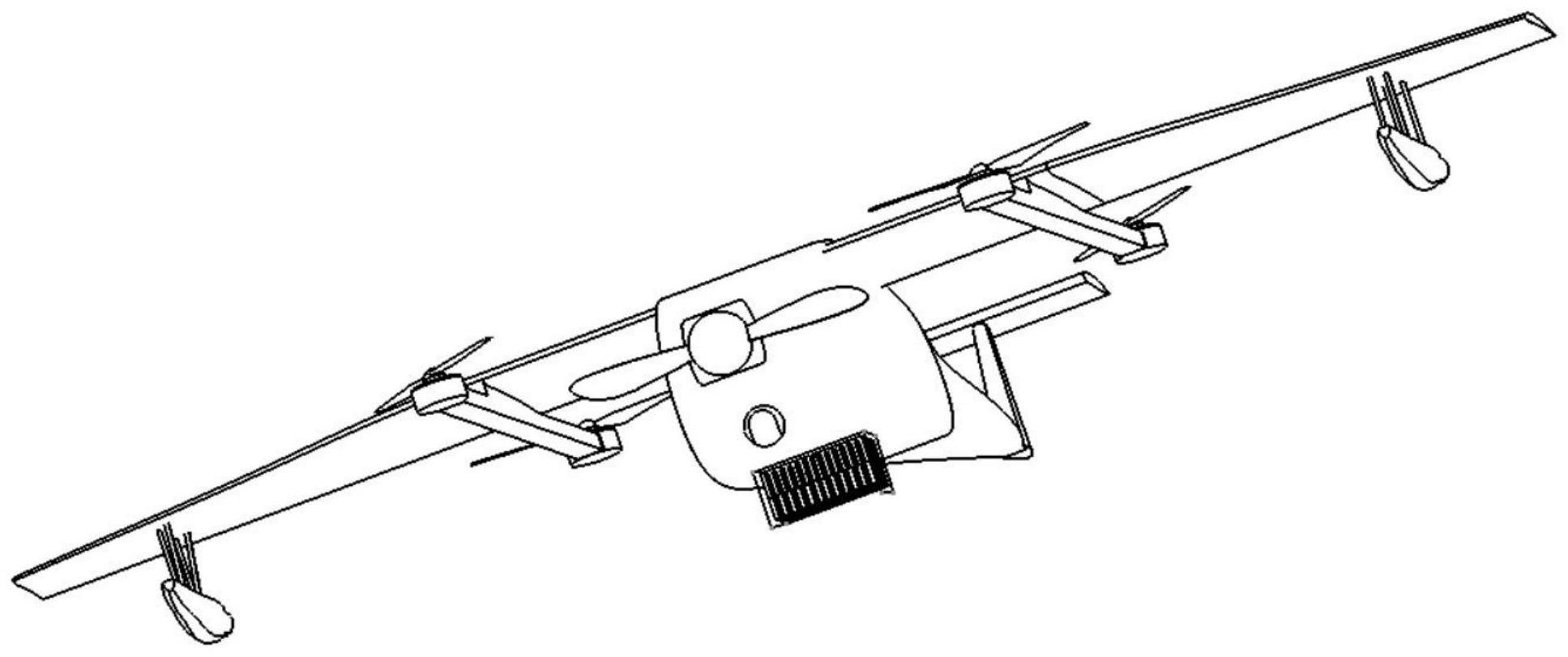
4、进一步的,垂直起降固定翼无人机布置有飞控与航电系统、电池组、地面站系统、差分系统及辅助配件等,主要外部特征包括机头下方悬挂三光吊舱,前拉式动力螺旋桨,上单翼,高平尾,机身中前端底部以机身为轴线对称布置可开口的舱门。
5、进一步的,各通过四个加强碳纤维杆在上单翼下方,远离机身处布置对称的两个船型空气浮筒,两个碳纤维杆均匀分布在机身轴线两侧上单翼下方,船型浮筒的内侧,两纤维杆内部两端布置电调,电调上布置电机,电机上布置旋翼螺旋桨。
6、进一步的,在机体内布置密封舱,密封舱大体呈现方型,底部与机体舱门一体成型,保证密封性,在密封舱外靠近底部侧面布置动力部件,主要是电机、调速器及电源组成,与密封舱内下方布置小型绞车相连接,小型绞车通过线缆连接机体下置舱门把手,从而实现机体下置舱门的收放。
7、进一步的,在密封舱外靠近顶部侧面处布置动力部件,主要是电机、调速器及电源组成,而后带动密封舱外上方小型绞车,密封舱外上方小型绞车通过线缆连接到密封舱内的内置部件把手,从而控制整个的密封舱内置部件收放,继而实现储存笼和潜航器笼及潜航器的下放入水。
8、进一步的,在密封舱内置独立且可下放的主要执行段,主要由三部分构成;(一)双线程独立传动机构与双储存笼相隔开,其内部主要有:减速器的轴通过键与齿轮a相连,齿轮a与齿轮b相啮合,齿轮b与离合器a的轴通过键连接,离合器a的另一端轴与齿轮c通过键连接且两端均布置轴承支撑轴,轴承镶嵌在双线程独立传动机构的壳内,齿轮c与齿轮d啮合,齿轮d与绞车a的轴通过键连接,且绞车两端均布置轴承支撑轴,轴承镶嵌在双线程独立传动机构的壳内,此为一线程布置情况,另一端也有一线程类似布置;(二)储存笼在双线程独立传动机构下方,在双储存笼两端内侧各布置两个电推杆,控制储存笼门的开关;(三)储存笼下方也是双笼式的,即潜航器笼,其内部在两端对称放置两潜航器,每一潜航器下方都有两笼门,对称打开,每一潜航器笼门内侧各布置两个电推杆,故双潜航器笼共有8个电推杆。
9、进一步的说,潜航器总体成“魔鬼鱼”形状,在潜航器后部设置推进螺旋桨,在主体轴线两侧各水平嵌入两个螺旋桨并配有动力装置,在潜航器顶部前端布置三轴云台及高清摄像头,潜航器前端头部布置机械手,机械手两侧布置照明灯,在潜航器下端中部位置布置嵌入式声纳,在潜航器后部顶端布置有线缆接口。
10、上述的一种内藏式可回收的无人潜航器作业系统的使用方式,包括以下步骤:
11、步骤一,准备工作;操作员观察飞行条件,如条件合适,操作人员将通过计算机控制垂直起降固定翼无人机开机,进行自动检测各传感器是否正常,若正常,将开启作业;
12、步骤二,飞至目标区域;通过计算机指令,设定目标水域,无人机将自动前往,首先垂直起降固定翼无人机垂直上升,而后改为固定翼模式前飞,至到目标水域,而后改为旋翼模式,垂直起降固定翼无人机上的三光吊舱监视周围环境,无人机下降至水面,船型空气浮筒落入水中,旋翼停转;
13、步骤三,开始执行任务;垂直起降固定翼无人机下方通过密封舱内的下方小型绞车将机体下置舱门开启,而后密封舱外的上方小型绞车连接内置部件把手,从而带动密封舱内置部件整体下降,双潜航器笼及双储存笼进入水中后,潜航器下方笼门开启,分别释放有缆潜航器,两位操作人员分别控制两潜航器进行移动,通过潜航器三轴云台及摄像头对水下或水面环境进行观测并实时回传计算机监视器,控制机械手进行抓取目标,通过在储存笼上方内侧电推杆向内打开储存笼门,而后将目标放至储存笼,而后关闭储存笼门,继续进行作业;
14、步骤四,飞至下一水域;完成目标任务后,将进行回收潜航器,控制潜航器向垂直起降固定翼无人机位置靠拢,并同时通过绞车缓慢回收线缆,在达到垂直起降固定翼无人机相对下方位置,距离潜航器笼相对1米位置时,通过潜航器摄像头调整其位置,配合双线程独立传动机构中绞车线缆回收进笼,两潜航器均此回收方式;关闭潜航器笼门,并不关闭垂直起降固定翼无人机下置舱门,旋翼转动上升,将双储存笼及双潜航器笼中的水漏于水域,而后密封舱外的上方小型绞车连接内置部件把手,从而带动密封舱内置部件整体上升,将双潜航器笼及双储存笼回收密封舱内,通过密封舱内的下方小型绞车连接舱门把手,继而关闭机体下置舱门,判断电量是否支持下一水域任务,如支持,将进行下一水域作业;如不支持,计算机控制其返航。
15、与现有技术相比,本发明的优点如下;
16、1、本发明提供一种内藏式可回收的无人潜航器作业系统。首先无人机的创新优势如下,其一新形式;采用新式的垂直起降固定翼无人机,且为上单翼布局,上单翼的设计能最大程度利用机身空间,减少对机体空间的挤占。垂直起降固定翼无人机是结合多旋翼和固定翼二者优势,既能高速巡航又能垂直起降和精准悬停,解决了固定翼无人机起降对场地的要求,同时拥有了固定翼飞行距离长、速度快、高度高的优点,解决了多旋翼速度慢、飞行高度较低的问题。其二多任务,可以采用此平台可跨较远区域执行任务,且飞行时长可长达几小时,相对多旋翼有较强优势,凭借此长航时的优点,可以实现常态化作业,日常巡航,哪里需要就飞去哪里。其三新方式,机体下方开舱,作业时打开舱门,完成后即关闭舱门,由于是内藏作业载荷,对于垂直起降固定翼无人机的主要巡飞阶段的气动阻力将不会加强,此优势十分明显。
17、2、密封舱,布置在机体内部,在机身相对厚度最大的部分延机身纵轴布置,下端与机体舱门一体化设计,具有较好的密封性。
18、3、在传动潜航器的机械设计中,采用双线程独立传动机构,双绞车,更加高效,传动设计中采用离合器也是一大亮点,通过离合器可分别控制收放潜航器,更加独立自主安全高效。储存笼的设计可以在河道清淤中将堵塞的塑料垃圾或是河面垃圾等进行存放,而后带走。
19、4、潜航器设计类似“魔鬼鱼”型,在水中前行阻力相对较小,双潜航器的设计使作业半径加大,效率提高明显,潜航器设置三轴云台更加有利探测,灵活的机械手更加有利于抓取。照明器,下置声纳等,使得潜航器更加多功能化,更加有较强的水中适应性。
20、5、整个作业系统,充分结合无人机与有缆潜航器的各自特点,拓宽了无人机的探索空间,使得无人机既能空中巡查又可水中探查作业,突破了原来无人机的工作范围局限性,使其有较好的利用性。
- 还没有人留言评论。精彩留言会获得点赞!