一种基于无人船的浅水域动植物数据调查采集系统及方法与流程
本发明涉及浅水域生态研究,具体为一种基于无人船的浅水域动植物数据调查采集系统及方法。
背景技术:
1、浅水域通常指深度在1到5米之间的水域。这样的水域通常存在于河流、湖泊、池塘等水体中,是水生植物和水生动物的主要栖息地,拥有丰富的动植物资源,对生物物种多样性的保护具有十分重要的意义,在浅水域生态研究中,需要采集浅水域动植物的数据以便进行生态研究。
2、在采集浅水域动植物数据时通常是采用无人船,通过无人船上的图像采集装置进行采集浅水域动植物的图像数据,目前,无人船上通常安装有两组图像采集装置,一组安装在无人船上采集浅水域水面上的动植物数据,另一组安装在无人船底部采集浅水域水下的动植物数据,部分安装在无人船底部的图像采集装置有的通过支架固定,有的通过伸缩支架固定,前者采用支架固定的方式使得水下的图像采集装置的高度是一定的,在无人船在浅水域上移动时,由于水域水底的地形复杂,如果遇到浅水域水底较高(向上凸出)时,会使得水下的图像采集装置与其碰撞,造成水下的图像采集装置损坏,后者采用伸缩支架固定虽可根据水底的地形灵活调整水下的图像采集装置的高度,但是需要使用人员在无人船移动时时刻的查看水下的图像采集装置传输的图像数据,以便在水底地形发生改变时驱使伸缩支架带动水下的图像采集装置移动,较为麻烦的同时增加了人工劳动强度。为此,我们提出一种基于无人船的浅水域动植物数据调查采集系统及方法。
技术实现思路
1、本发明的目的在于提供一种基于无人船的浅水域动植物数据调查采集系统及方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
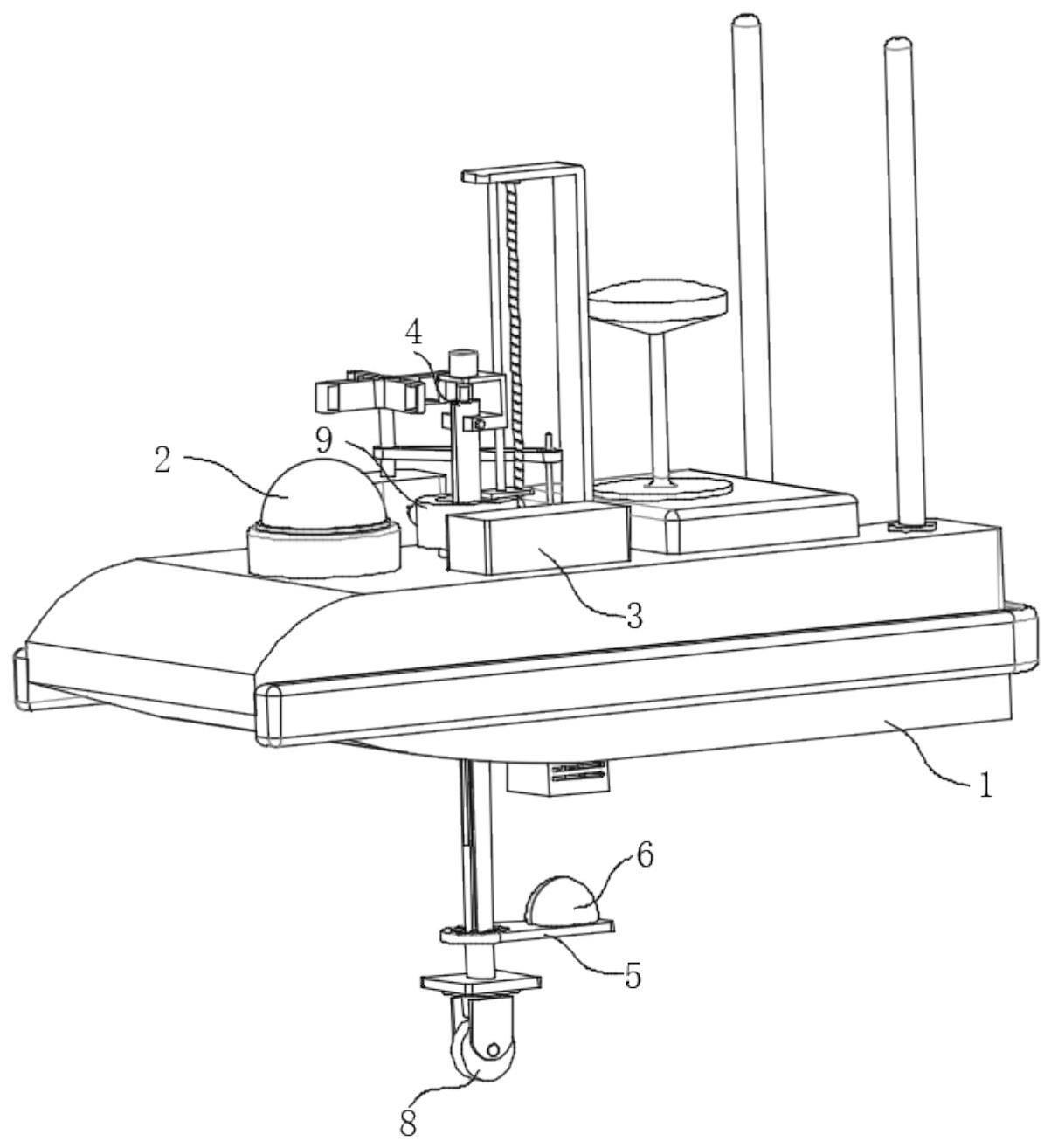
3、一种基于无人船的浅水域动植物数据调查采集系统,包括无人船主体,还包括图像采集装置一、电器组件、活动柱、架体、防水透明罩、图像采集装置二、万向轮以及密封连接件;
4、其中,所述图像采集装置一以及电器组件均设于无人船主体上,所述活动柱竖直贯穿无人船主体,所述架体设于活动柱外壁且处于无人船主体下方,所述防水透明罩设于架体上,所述图像采集装置二设于架体上且处于防水透明罩内侧,所述万向轮设于活动柱底端,所述密封连接件设于活动柱和无人船主体的连接处;
5、所述电器组件包括无线通讯装置,所述无线通讯装置用于将图像采集装置一和图像采集装置二采集的动植物图像数据远程发送给外界监控终端。
6、进一步改进在于,所述密封连接件包括t形筒、气囊圈、耐磨圈以及补偿部;
7、其中,所述t形筒竖直贯穿无人船主体并与无人船主体固定,所述t形筒内腔上下贯穿开设有容纳活动柱的通道,所述t形筒的内腔上端开设有与通道连通的环形空腔,所述气囊圈设于环形空腔内,所述耐磨圈设于气囊圈的内侧,所述耐磨圈的内壁与活动柱的外壁贴合,所述补偿部设于无人船主体上,且其输出端与气囊圈连通,用于在耐磨圈与活动柱之间出现间隙时向气囊圈充入气体,使得气囊圈膨胀挤压耐磨圈贴合活动柱的外壁。
8、进一步改进在于,所述补偿部包括检测机构和补气机构,所述检测机构在检测到耐磨圈与活动柱之间出现间隙时驱使补气机构向气囊圈补气;
9、其中,所述检测机构包括活动块、弹簧一、限位块以及压力传感器;
10、所述活动块活动设于活动柱一侧外壁开设的凹槽内,所述弹簧一的一端连接凹槽的槽底,另一端连接活动块,所述限位块设于凹槽内壁且处于活动块内侧,所述压力传感器设于凹槽槽底,用于在活动块与限位块接触时接收活动块的压力信号;
11、所述电器组件还包括控制模块;
12、所述压力传感器在接收活动块的压力信号低于阈值时发送信号给控制模块,由控制模块控制补气机构工作。
13、进一步改进在于,所述补气机构包括连接筒、出气管、塞体、电磁块、弹簧二、通气口一、引风座、风杯件、进气管以及引风叶轮;
14、其中,所述连接筒一端通过管道连通气囊圈,另一端连通出气管,所述连接筒的内径大于出气管的内径,所述塞体呈t形,所述塞体的一端与出气管内腔适配且伸入出气管内,另一端位于连接筒内,所述塞体远离连接筒的一端开设有过渡通道,所述电磁块通过支杆设于连接筒内,所述塞体位于连接筒内的一端外壁设有与电磁块对应的永磁块,所述弹簧二一端连接支杆,另一端连接塞体位于连接筒内的一端,所述通气口一开设于出气管的外壁,所述塞体的外壁开设有与过渡通道连通且与通气口一对应的通气口二,所述引风座设于无人船主体上,且引风座的进气端和出气端分别与进气管和出气管连通,所述引风座上竖直插设有轴体,所述风杯件设于轴体上端,所述引风叶轮设于轴体位于引风座内的一端;
15、所述电磁块电性连接控制模块,所述电磁块通电吸附永磁块驱使塞体移动至预设位置,在所述塞体移动至预设位置时,塞体上的通气口二处于连接筒内,且此时通气口一与塞体外壁对应。
16、进一步改进在于,所述架体通过外环套设于活动柱外壁,所述外环的内侧且处于活动柱内腔的位置设有内环,所述内环和外环之间通过多组连接块连接,所述活动柱的外壁开设有供连接块移动的竖向活动口,所述内环螺纹套设于螺柱一外壁,所述螺柱一竖直转动设于活动柱内腔,所述螺柱一的顶端贯穿活动柱顶端并与旋转装置一输出端连接,且旋转装置一通过u形架与活动柱外壁连接,所述旋转装置一电性连接控制模块。
17、进一步改进在于,所述连接筒上方设有顶动u形架向上移动的顶板,所述顶板螺纹套设于螺柱二外壁,所述螺柱二的一端与l形架转动连接,另一端与设于无人船主体上的旋转装置二输出端转动连接,所述l形架设于无人船主体上,所述l形架还连接有竖直贯穿顶板的导杆,所述旋转装置二电性连接控制模块。
18、进一步改进在于,所述无人船主体底部对应防水透明罩的位置设有底部为中空的保护罩,所述保护罩内竖直插设有旋转轴,所述旋转轴的顶端贯穿无人船主体顶部并通过链轮传动组与风杯件轴心的轴体传动连接,所述旋转轴的底端位于保护罩内并连接有弧形清洁件,所述弧形清洁件用于在保护罩底部和架体顶部贴合时罩设于防水透明罩外壁。
19、一种基于无人船的浅水域动植物数据调查采集方法,利用上述的系统,具体包括以下步骤:
20、s1:将无人船主体放置浅水域内指定区域,通过万向轮与水底接触,无人船主体在浅水域内移动,通过图像采集装置一采集水面上的动植物图像数据,通过图像采集装置二采集水里的动植物图像数据;
21、s2:无线通讯装置将图像采集装置一和图像采集装置二采集的动植物图像数据远程发送给外界监控终端。
22、与现有技术相比,本发明的有益效果是:
23、本技术方案通过图像采集装置一采集浅水域水面上的动植物数据,将图像采集装置二设于架体上采集浅水域水下的动植物数据,架体设于活动柱上,活动柱采用万向轮与浅水域的水底接触,在无人船主体移动时,万向轮在浅水域的水底面移动,活动柱根据水底与水面的距离自动上下移动进行自适应调整架体的位置,使得图像采集装置二始终处于水下的同时不会接触到水底,无需人工实时调整的同时避免图像采集装置二因水底地形而与水底接触造成损坏的情况发生,保证其稳定的进行动植物数据的采集工作,本技术还设置有密封连接件,保证活动柱和无人船主体连接处的密封性,延长无人船主体上的电器设备寿命以及该无人船主体在水域中移动的稳定性,同时本技术在使用时,可调整图像采集装置二相对于活动柱移动,提高图像采集装置二的采集范围,同时在不使用时,可使得架体移动至预设位置,通过保护罩为图像采集装置二提供保护的同时通过弧形清洁件进行清洁。
- 还没有人留言评论。精彩留言会获得点赞!