一种具有船舵功能的电机直驱推进系统的制作方法
本发明涉及船舶推进,尤其涉及一种具有船舵功能的电机直驱推进系统。
背景技术:
1、直驱推进器是一种先进的推进系统,它通过直接将电动机与推进器相连,将电能转化为推进力,从而推动船舶前进。与传统的推进系统相比,直驱推进器消除了传动系统中的复杂结构和能量转换损失,提供了更高的效率和动力输出。直驱推进器的核心组件是高效的电动机,通常是永磁同步电机或感应电机,可直接安装在船舶的推进器中。直驱推进器能够实现精确的转向和舵控功能,从而提高船舶的操纵性和机动性。通过电子控制系统,船舶操作员可以精确控制推进器的输出功率和转向角度,实现船舶的前进、后退、转向和停靠等航行操作。直驱推进器还具有静音和环保的优势。它在船舶工程领域的应用不断增加,为船舶提供了更高效、可靠和可持续的推进解决方案。
2、中国专利公开号:cn113232816a公开了一种船用推进器,包括柴油机驱动、立杆、操作杆、封装、螺旋桨和水封,以及位于立杆内部的主轴和位于封装内连接螺旋桨的桨轴,螺旋桨的正前方设有舵叶,且舵叶位于螺旋桨轴线垂直面,螺旋桨的上方设有与立杆连接的舵叶驱动,舵叶驱动舵叶左右摆动,螺旋桨的下方设有与封装连接的下固定板,下固定板连接舵叶的下端,桨轴上位于主轴垂直下方的位置设有凸轴,凸轴的两侧分别设有正转机构和反转机构,正转机构或反转机构与凸轴连接,以实现同轴正转或反转,不同方向的转动产生的紊流可以将螺旋桨叶片的污物冲洗下去,有效的减少了污物的附着,有效的提高螺旋桨的维护周期。但是该发明未解决在提高船舶航行效率和安全性的情况下船舶导航和控制方面的问题。
技术实现思路
1、为此,本发明提供一种具有船舵功能的电机直驱推进系统,用以克服现有技术中解决船舶导航和控制方面的问题,以提高船舶的航行效率、安全性和精确性。
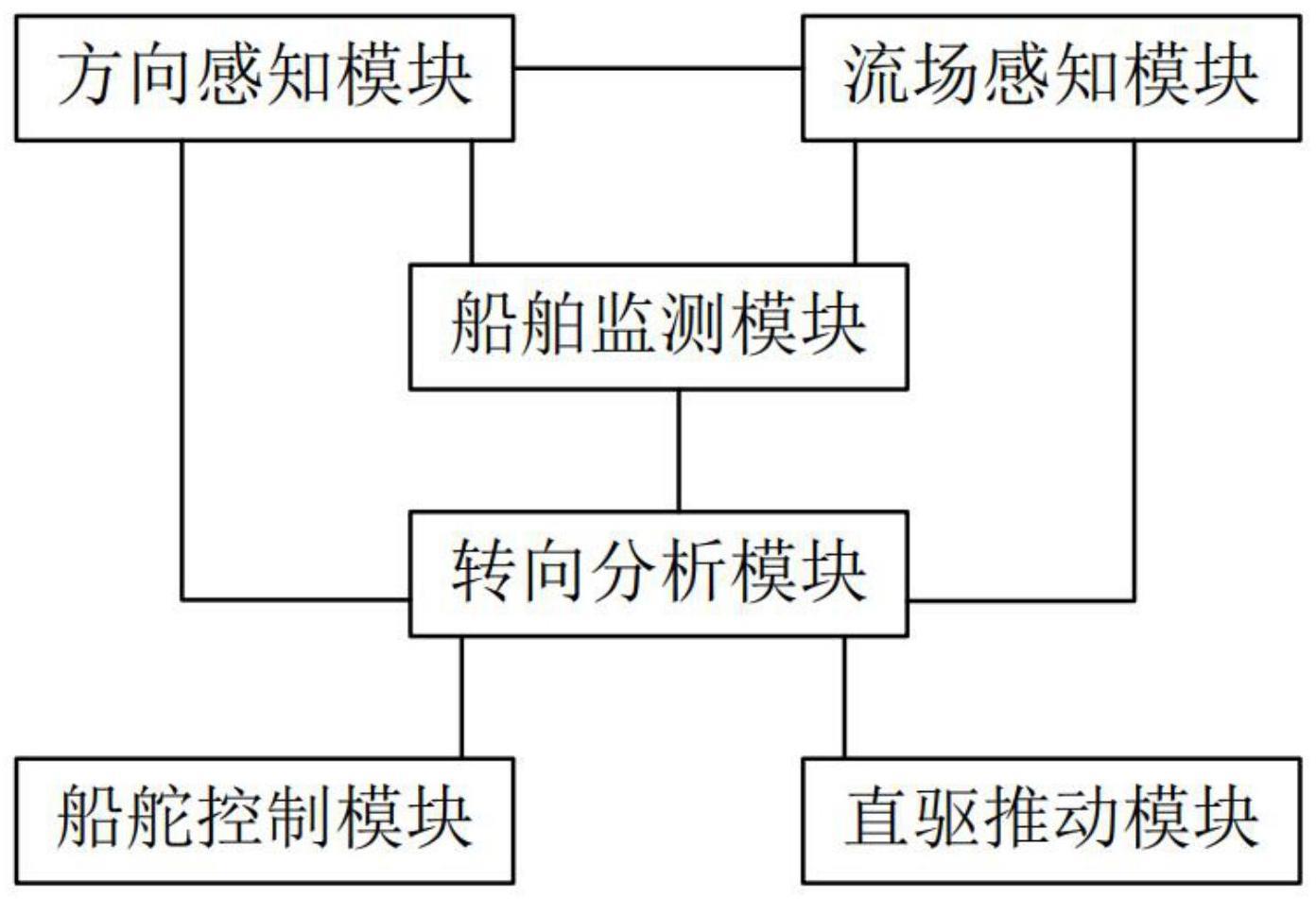
2、为实现上述目的,本发明提供一种具有船舵功能的电机直驱推进系统,包括:
3、方向感知模块,其用以根据船舶当前方向与转向目标信息确定转向角度;
4、流场感知模块,其与所述方向感知模块相连,用以检测所述船舶当前所在位置的流场数据,其中,所述流场数据包括水流方向、水流速度、风向和风速;
5、船舶监测模块,其分别与所述方向感知模块和所述流场感知模块相连,用以通过传感器获取船舶周围环境信息和船舶自身信息;
6、所述船舶周围环境信息包括船舶周围的障碍物和船舶所在位置的气象条件;
7、所述船舶自身信息包括当前速度、所在位置、船身姿态、船舶性能和船舶约束条件;
8、所述障碍物包括其他船只、浮标、礁石和岸边,所述气象条件包括气温、湿度、能见度和降水;
9、转向分析模块,其分别与所述方向感知模块、所述流场感测模块和所述船舶监测模块相连,用以根据所述转向角度、所述流场数据、所述船舶周围环境和所述船舶自身信息确定船舶的转向模式以使船舶按照预设的路径和目标进行航行,并根据船舶周围环境和/或转向效率确定转向角度的调整量;
10、船舵控制模块,其与所述转向分析模块相连,设置在所述船舶上并与船舵相连,用以调整舵叶的角度以改变船舶的转向速度和航行方向,以及调整直驱推进装置的工作方式;
11、直驱推进模块,其与所述转向分析模块相连,用以通过控制直驱推进装置的转速、功率和推进方向以向船舶提供推进动力,并,根据所述转向模式的判定结果控制所述直驱推进装置的叶轮朝向以保持船体的转向稳定。
12、进一步地,直驱推进装置包括组合推进单元和水流导向单元;
13、所述组合推进单元包括一个用以提供船舶航行的推进动力的动力电机直驱推进器和分布在船体周围用以保持船体平衡的四个可转向的平衡电机直驱推进器;
14、所述水流导向单元包括四个分别对应设置在四个平衡电机直驱推进器外部的水流导向部,以使单个水流导向部中的水流经对应的转向平衡电机直驱推进器;
15、单个水流导向部设置有导向贯通口和平衡贯通口,导向贯通口与平衡贯通口的贯通交汇位置安装有对应的所述平衡电机直驱推进器,且,各平衡贯通口的贯通方向均为垂直于水平面的方向;
16、所述动力电机直驱推进器包括电动机和推进器,所述电动机的轴与所述推进器直接相连作为所述推进器的动力源通过控制信号控制输出转矩和转速,所述推进器用以将电动机的转动力转化为推力,推进水体以驱动船舶前进;
17、所述平衡电机直驱推进器设置有电动机和叶轮,所述叶轮的轮缘外侧与一个转向电机相连,用以带动所述叶轮绕其轮缘直径旋转以改变所述平衡电机直驱推进器的推进方向。
18、进一步地,单个水流导向部还设置有水流角度调整组件,用以通过水流角度调整组件调整导向贯通口与船体移动方向所呈角度。
19、进一步地,平衡电机直驱推进器分别安装于船舷底部与水接触的第一位置、第二位置、第三位置和第四位置,所述第一位置和所述第二位置位于船舷前侧且沿船体中轴线对称,所述第三位置和所述第四位置位于船舷后侧且沿船体中轴线对称;
20、其中,第一水流导向部的第一导向贯通口贯通船体左舷的前侧和外侧、第二水流导向部的第二导向贯通口贯通船体右舷的前侧和外侧、第三水流导向部的第三导向贯通口贯通船体左舷的后侧和外侧,以及,第四水流导向部的第四导向贯通口贯通船体右舷的后侧和外侧;
21、单个所述平衡电机直驱推进器的转向电机与对应的导向贯通口及平衡贯通口均垂直,用以通过调整转向轴角度调整平衡电机直驱推进器的推进方向以使平衡电机直驱推进器的推进方向至少包括导向贯通口的贯通方向和垂直贯通口的贯通方向。
22、进一步地,转向方向感知模块包括:
23、方向感知装置,其设置在船舶的导航桥或船舶顶部,用以获取船舶的当前方向;
24、显示装置,其与所述方向感知装置相连,用以显示当前船舶所在位置的全景影像或地图影像,并显示船舶的当前方向;
25、转向目标获取单元,其与所述方向感知装置相连,用以通过获取显示装置上确认的转向目标的图像位置信息确定转向目标的实际位置信息,并计算船舶当前位置与转向目标相对位置关系;
26、转向计算单元,其与所述转向目标获取单元相连,用以根据船舶当前位置与所述转向目标位置的相对位置关系计算初始转向角度;
27、其中,所述相对位置关系包括距离偏差和方向偏差。
28、进一步地,初始转向角度θ在canvas坐标系下由下式表示:
29、θ=atan2(u,v)
30、其中,u为船舶与转向目标的经度,v为船舶与转向目标的纬度,θ∈[-π,π];
31、所述canvas坐标系以当前船舶所在位置为原点建立。
32、进一步地,船舵控制模块根据所述初始转向角度θ与转向环境影响量确定舵叶的实际转动角度θa以使船舶的航向转向所述转向目标;
33、θa=θ+θw+θc
34、其中,θw为流场角度影响量,由所述流场数据与初始转向角度的确定,θc为船舶特性修正角度。
35、进一步地,直驱推进装置还设置有舵叶机构和用以悬挂所述动力电机直驱推进器的悬挂装置;
36、其中,所述舵叶机构设置在船舶尾部并位于船体轴线上,用以通过控制舵叶偏转角度调整船舶的航向;
37、所述悬挂装置安装在船体轴线上并位于船舵叶片前方,其设置为可绕垂直与海平面轴心旋转的可旋转结构,用以改变所述动力电机直驱推进器的推进方向。
38、进一步地,转向分析模块预设有通过调整舵叶角度以使船舶朝向目标方向转动的主动转向模式,和通过调整舵叶角度和调整所述动力电机直驱推进器的推进方向以使船舶朝向目标方向转动的响应转向模式;
39、其中,响应于所述主动转向模式,所述直驱推进模块控制各转向电机进行推进方向确认,以使各平衡电机直驱推进器的推进方向与相应的导向贯通口平行且推进方向至少存在与船舶当前航行方向同向的分量;
40、在触发响应转向模式后,所述船舵控制模块控制各所述转向电机调整推进方向,以使与转向方向同侧的平衡电机直驱推进器的推进方向竖直向下以通过平衡贯通口向下喷水保持船体平衡。
41、进一步地,转向分析模块根据所述船舶周围环境和/或转向效率确定船舶的转向模式;
42、若达到第一预设条件,则触发响应转向模式改变舵叶角度并调整所述动力电机直驱推进器的方向;
43、所述第一预设条件包括所述船舶监测模块监测到在预设规划航线中存在位于船舶周围的障碍物,当前船舶的实际行驶航线与预设规划航线的偏差超出预设偏航范围,以及计算的舵叶的实际转动角度大于预设角度。
44、进一步地,转向分析模块在第一响应转向模式条件下根据以船舶初始位置为角度顶点,当前船舶位置和转向目标位置形成的角度确定所述电机直驱推进器的调整方向;
45、若所述角度是正值,则转向分析模块判定对所述悬挂装置顺时针方向调整以对应调整所述动力电机直驱推进器的方向;
46、若所述角度是负值,则转向分析模块判定对所述悬挂装置逆时针方向调整以对应调整所述动力电机直驱推进器的方向;
47、其中,所述第一响应转向模式条件为当前船舶的实际行驶航线与预设规划航线的偏差超出预设偏航范围且触发响应转向模式
48、与现有技术相比,本发明的有益效果在于,方向感知模块结合转向目标信息,确保船舶可以精确地根据当前方向和目标信息确定转向角度,从而实现准确的转向操作。
49、进一步地,流场感测模块获取船舶当前位置的流场数据,包括水流方向、水流速度、风向和风速等信息,这些数据对于船舶的航行计划和路径规划至关重要,能够帮助船舶选择最优的航行路线和节能航行方案。
50、进一步地,船舶监测模块通过传感器获取船舶周围环境和船舶自身信息,包括障碍物、气象条件以及船舶的速度、位置、姿态和性能等,这些信息能够实时监测船舶的安全情况,提供船舶操作员对周围环境的全面感知,从而避免碰撞事故和遵守航行约束条件。
51、进一步地,转向分析模块综合考虑方向感知模块、流场感测模块和船舶监测模块的数据,通过算法分析计算最适合的转向模式,并根据预设的路径和目标引导船舶进行航行,这种智能化的分析能力大大提高了船舶的航行安全性、效率和自主性。
52、进一步地,直驱推进模块作为推进系统的核心,根据转向分析模块的指令控制推进装置的转速、功率和方向,为船舶提供精确的推进力,从而实现船舶的前进、停止、转向和航行控制,直接驱动的推进系统具有高效、可靠且故障率低的特点,能够提升船舶的性能、操纵性和能源利用效率。
- 还没有人留言评论。精彩留言会获得点赞!