一种用于船舶舰桥信号采集器安装的定位装置的制作方法
本发明涉及安装定位装置,具体而言,涉及一种用于船舶舰桥信号采集器安装的定位装置。
背景技术:
1、船舶舰桥信号采集器是一种用于采集船舶舰桥内部各项数据和信号的装置。船舶舰桥作为船舶的指挥和操作中心,通常配备了多种仪器、设备和传感器,用于监测和控制船舶的运行状态、导航信息以及其他关键参数。信号采集器的作用是将这些各项数据和信号进行采集、整理和传输,以便船舶的船员和系统可以实时获取和处理这些信息。
2、信号采集器位置固定在数据准确性、一致性、信号来源追溯、稳定性、操作便捷性和维护方面具有重要作用。通过保持信号采集器在固定的位置,可以提高数据采集的可靠性和有效性,从而为船舶运行和管理提供可靠的基础信息。然而当前对信号采集器安装固定中大多是直接通过螺栓将信号采集器安装到墙体的合适位置,这样就导致信号采集器在安装后位置难以调节,若螺栓松动则直接造成信号采集器位置变动,且在信号采集器出现损坏或者异常需要进行检修更换时操作不便,对维修人员的经验要求较高,并且过去安装后是否发生移动仅依靠人为判断缺乏依据,造成维护维修不便。
3、因此,有必要设计一种用于船舶舰桥信号采集器安装的定位装置用以解决当前存在的问题。
技术实现思路
1、鉴于此,本发明提出了一种用于船舶舰桥信号采集器安装的定位装置,旨在解决当前船舶舰桥信号采集器安装定位时存在的维护维修不便,大量依靠操作人员经验判断,自动化程度较低的问题。
2、本发明提出了一种用于船舶舰桥信号采集器安装的定位装置,包括:
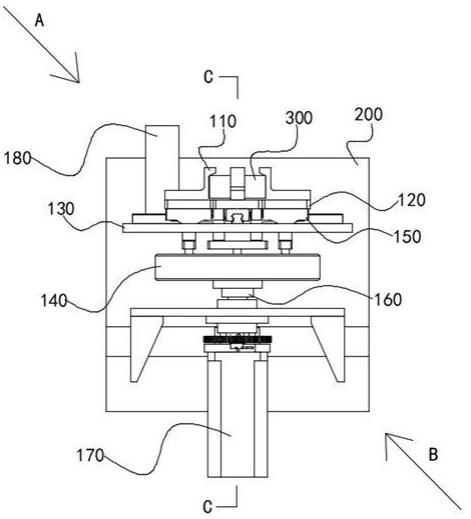
3、固定爪、滑块、导向盘、紧固盘、紧固连杆、传动连杆、动力组件和控制模块;其中,所述传动连杆位于所述动力组件的一侧,且所述传动连杆的一端与所述动力组件可转动连接,所述传动连杆的另一端固定在所述紧固盘上;所述紧固连杆的一端可沿所述紧固盘上的紧固沟槽滑动,所述紧固连杆的另一端穿过导向沟槽与所述滑块固定连接;所述导向沟槽开设在所述导向盘上;所述固定爪与所述滑块固定;所述控制模块与所述动力组件电连接;
4、控制模块包括:
5、采集单元,被配置为采集信号采集器的图像数据,根据所述图像数据获取所述信号采集器的尺寸信息和硬度信息;
6、判断单元,被配置为根据所述尺寸信息判定是否可完成夹紧固定,并在确定所述信号采集器可被夹紧固定时,根据所述硬度信息确定夹持力;
7、控制单元,被配置为在确定所述夹持力后控制所述动力组件转动,以使得所述固定爪移动对所述信号采集器进行夹紧固定,当所述固定爪与所述信号采集器接触时获取所述信号采集器的光洁度,根据所述光洁度判断是否对所述夹持力进行调整;
8、维护单元,被配置为当所述控制单元判定是否对所述夹持力进行调整并完成对所述信号采集器的夹紧操作后,所述维护单元初步确定维护时间间隔;
9、调整单元,被配置为当所述维护单元确定维护时间间隔后,所述调整单元在预设时间内获取不少于两个夹紧后的图像数据,将夹紧后的图像数据进行比对,根据比对结果判断是否对维护时间间隔进行调整;
10、告警单元,被配置为在经过所述维护时间间隔后,发出维护维修预警。
11、进一步的,所述判断单元根据所述尺寸信息判定是否可完成夹紧固定,包括:
12、所述判断单元还用于预先设定第一预设尺寸q1和第二预设尺寸信息q2,且q1<q2;所述判断单元根据所述信号采集器的尺寸信息q0与各预设尺寸信息的比对关系判定是否可完成夹紧固定;
13、当q0<q1或q0>q2时,所述判断单元判定所述信号采集器不可完成夹紧固定;
14、当q1≤q0≤q2时,所述判断单元判定所述信号采集器可完成夹紧固定,并根据硬度信息确定夹持力。
15、进一步的,所述判断单元在确定所述信号采集器可被夹紧固定时,根据所述硬度信息确定夹持力,包括:
16、所述判断单元还用于预先设定第一预设硬度y1、第二预设硬度y2和第三预设硬度y3,且y1<y2<y3;预先设定第一预设夹持力n1、第二预设夹持力n2和第三预设夹持力n3,且n1<n2<n3;根据所述信号采集器的硬度信息y0与各预设硬度的大小关系确定夹持力;
17、当y1≤y0<y2时,所述判断单元确定夹持力为n1;
18、当y2≤y0<y3时,所述判断单元确定夹持力为n2;
19、当y3≤y0时,所述判断单元确定夹持力为n3。
20、进一步的,在所述判断单元确定所述信号采集器可完成夹紧固定并确定夹持力为ni后,i=1,2,3,所述控制单元获取所述信号采集器的光洁度,根据所述光洁度判断是否对所述夹持力进行调整,包括:
21、所述控制单元还用于预先设定第一预设光洁度g1,根据所述信号采集器的光洁度g0与所述第一预设光洁度g1的大小关系,判断是否对所述夹持力进行调整;
22、当g0≥g1时,所述控制单元判定对所述夹持力进行调整;
23、当g0<g1时,所述控制单元判定不对所述夹持力进行调整。
24、进一步的,当所述控制单元判定对所述夹持力进行调整时,获取调整后的夹持力,并以所述调整后的夹持力夹紧固定所述信号采集器,包括:
25、所述控制单元还用于预先设定第二预设光洁度g2和第三预设光洁度g3,且g1<g2<g3;预先设定第一预设调整系数a1、第二预设调整系数a2和第三预设调整系数a3,且a1<a2<a3;根据所述信号采集器的光洁度g0与各预设光洁度的大小关系,选取调整系数对夹持力ni进行调整,获取调整后的夹持力;
26、当g1<g0<g2时,选取所述第一预设调整系数a1对所述夹持力ni进行调整,获取调整后的夹持力ni*a1;
27、当g2≤g0<g3时,选取所述第二预设调整系数a2对所述夹持力ni进行调整,获取调整后的夹持力ni*a2;
28、当g3≤g0时,选取所述第三预设调整系数a3对所述夹持力ni进行调整,获取调整后的夹持力ni*a3。
29、进一步的,所述维护单元在所述控制单元判定是否对所述夹持力进行调整并完成对所述信号采集器的夹紧操作后,所述维护单元确定维护时间间隔,包括:
30、所述维护单元还用于预先设定第一预设时间间隔t1、第二预设时间间隔t2和第三预设时间间隔t3,且t1<t2<t3;根据夹持力的大小关系,确定所述维护时间间隔;
31、当所述控制单元判定不对所述夹持力进行调整时,所述夹持力为ni,i=1,2,3;若夹持力为n1,所述维护单元确定维护时间间隔为t1;若夹持力为n2,所述维护单元确定维护时间间隔为t2;若夹持力为n3,所述维护单元确定维护时间间隔为t3;
32、当所述控制单元判定对所述夹持力进行调整时,调整后的夹持力为ni*ai,i=1,2,3;若n1≤ni*ai<n2,所述维护单元确定维护时间间隔为t1;若n2≤ni*ai<n3,所述维护单元确定维护时间间隔为t2;若n3≤ni*ai,所述维护单元确定维护时间间隔为t3。
33、进一步的,在所述维护单元确定维护时间间隔为ti后,i=1,2,3,所述调整单元将夹紧后的图像数据进行比对,根据比对结果判断是否对维护时间间隔进行调整,包括:
34、若夹紧后的信号采集器发生位移,所述调整单元判定对维护时间间隔ti进行调整;
35、若夹紧后的信号采集器没有发生位移,所述调整单元判定不对维护时间间隔ti进行调整。
36、进一步的,当所述调整单元判定对维护时间间隔ti进行调整时,所述调整单元还用于:
37、采集位移距离l0、环境温度w0和环境湿度s0;预先设定第一预设位移距离l1、第二预设位移距离l2和第三预设位移距离l3,且l1<l2<l3;预先设定第一预设时间调整系数b1、第二预设时间调整系数b2和第三预设时间调整系数b3,且b1<b2<b3;
38、根据所述位移距离l0与各预设位移距离的大小关系,选取时间调整系数对维护时间间隔ti进行调整,获取调整后的维护时间间隔;
39、当l1≤l0<l2时,选取所述第三预设时间调整系数b3对维护时间间隔ti进行调整,获取调整后的维护时间间隔ti*b3;
40、当l2≤l0<l3时,选取所述第二预设时间调整系数b2对维护时间间隔ti进行调整,获取调整后的维护时间间隔ti*b2;
41、当l3≤l0时,选取所述第一预设时间调整系数b1对维护时间间隔ti进行调整,获取调整后的维护时间间隔ti*b1。
42、进一步的,在选取第i预设时间调整系数bi对维护时间间隔ti进行调整,获取调整后的维护时间间隔ti*bi后,i=1,2,3,所述调整单元还用于:
43、预先设定第一预设环境温度w1、第二预设环境温度w2和第三预设环境温度w3,且w1<w2<w3;根据所述环境温度w0与各预设环境温度的大小关系选取时间调整系数对调整后的维护时间间隔ti*bi进行二次调整,获取二次调整后的维护时间间隔;
44、当w1≤w0<w2时,选取所述第一预设时间调整系数b1对调整后的维护时间间隔ti*bi进行二次调整,获取二次调整后的维护时间间隔ti*bi*b1;
45、当w2≤w0<w3时,选取所述第二预设时间调整系数b2对调整后的维护时间间隔ti*bi进行二次调整,获取二次调整后的维护时间间隔ti*bi*b2;
46、当w3≤w0时,选取所述第三预设时间调整系数b3对调整后的维护时间间隔ti*bi进行二次调整,获取二次调整后的维护时间间隔ti*bi*b3。
47、进一步的,在选取第i预设时间调整系数bi对调整后的维护时间间隔ti*bi进行二次调整,获取二次调整后的维护时间间隔ti*bi*bi后,i=1,2,3,所述调整单元还用于:
48、预先设定第一预设湿度s1、第二预设湿度s2和第三预设湿度s3,且s1<s2<s3;根据所述环境湿度s0与各预设湿度的大小关系选取时间调整系数对二次调整后的维护时间间隔ti*bi*bi进行三次调整,获取三次调整后的维护时间间隔;
49、当s1≤s0<s2时,选取第三预设时间调整系数b3对二次调整后的维护时间间隔ti*bi*bi进行三次调整,获取三次调整后的维护时间间隔ti*bi*bi*b3;
50、当s2≤s0<s3时,选取第二预设时间调整系数b2对二次调整后的维护时间间隔ti*bi*bi进行三次调整,获取三次调整后的维护时间间隔ti*bi*bi*b2;
51、当s3≤s0时,选取第一预设时间调整系数b1对二次调整后的维护时间间隔ti*bi*bi进行三次调整,获取三次调整后的维护时间间隔ti*bi*bi*b1。
52、与现有技术相比,本发明的有益效果在于:通过固定爪、滑块、导向盘、紧固盘、紧固连杆、传动连杆、动力组件和控制模块的协同作用,实现了信号采集器的稳定安装、自动夹持和维护时间管理,从而解决了传统螺栓安装方式存在的难以调节、维修不便等问题。通过采集信号采集器的图像数据,获取信号采集器的尺寸和硬度信息,从而判定是否可以进行夹紧固定操作,实现了自动判断,初步确保了对信号采集器的稳定夹持,当确认可固定时,根据硬度信息确定夹持力,避免了过度或不足的夹持。控制模块根据光洁度信息判断是否需要调整夹持力,从而保证信号采集器的稳定夹紧。维护单元根据维护时间间隔进行维护预警,通过比对夹紧后的图像数据,判断维护时间间隔是否需要调整,从而实现实时有效的维护管理。改变了传统主要依靠人工判断的方式,减少了维护成本且有利于及时发现问题采取维护措施,解决了决策滞后的难题。
- 还没有人留言评论。精彩留言会获得点赞!