一种鱼探仪校准牵引线无人释放器的制作方法
本发明涉及声学设备校准,特别是涉及渔业声学设备鱼探仪校准辅助设备。
背景技术:
1、运用船载科学鱼探仪通过实时的回声集成和目标强度探测集群性较强的海洋生物在开展生物资源及分布评估、生物栖息地及行为学研究和渔业生产中发挥着重要的作用。为了提高探测精度,在开展任务前一般采用三线悬系法开展标准球校准。考虑到校准海域环境、船舶实际条件和校准要求,尤其是在极地等极端环境下,一般采用先布设牵引线,然后将牵引线替换为符合校准要求的校准悬线的方法。在实际校准操作过程中,受到海域环境和船舶条件的影响,布设牵引线工作难度较大且效率不高。在海洋科考中,可借助考察船橡皮艇、rov等辅助设备开展牵引线布设工作。在实际工作中有利用rov从船舶底部进入船舶另一侧开展布放工作的案例,实际经验表明,rov布放牵引线对其自身的抗流性和操控有较高要求,且容易受到其电缆线或保护绳影响。即使考察船有橡皮艇、rov等设备辅助,但仍受到海况、人员及设备安全等困扰,牵引线布设效率虽有提高但仍不高效,并没有专业的牵引线布放设备。一些小型科考船或渔船等船舶不具备橡皮艇、rov等设备的辅助条件,给鱼探仪校准工作带来很大困扰。只能通过人力将牵引线从船艏或船艉移至换能器中心的船舶横断面内,这种传统方法虽然对外界因素依赖较小,但容易对船艉螺旋桨和船艏仪器等关键设备造成威胁。在船艉布放时,布放行程较长,且需要绕过许多设备及舱室,布设人员需求大、耗时长且比较危险。在船艏布放时,停泊状态下受到锚链影响,无法进行牵引线布放。在船舶未进入停船状态即使是低速状态下进行牵引线布设对人员安全会有极大风险,但如果进入停船状态但未下锚,也会增加船舶和在船人员的风险(校准海域一般水深较浅)。因此,为了适应不同校准海域环境和船舶条件,在鱼探仪校准工作开始前快速高效安全的将牵引线布放至换能器中心的船舶横断面内,需要配备专业的牵引线布放设备,在满足校准海域环境和船舶条件下,布放设备无人化、轻量化和可操控性显得尤为重要。
技术实现思路
1、针对现有技术存在的问题,本发明需要解决的是提供一种鱼探仪校准牵引线无人释放器,通过无线操控终端控制无人载具实现鱼探仪校准牵引线的快速高效无人布放工作。
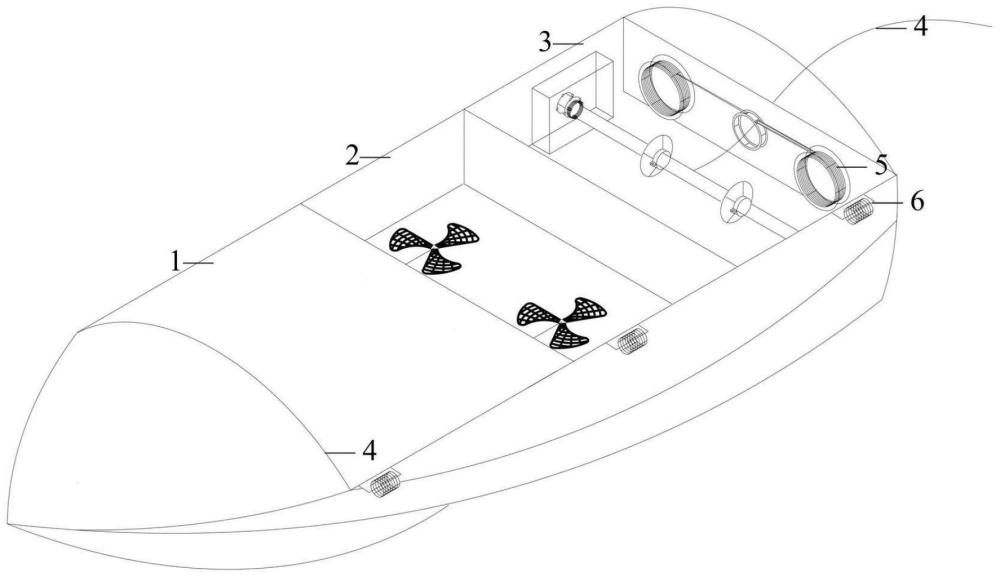
2、本发明的技术方案是:一种鱼探仪校准牵引线无人释放器,包括释放器主体,其特征在于,所述释放器主体包括无人艇载具、限位牵引线、无线操控终端和通信系统,所述无线操控终端和通信系统用于远程控制无人艇载具推进舱和牵引线释放舱运行;
3、所述无人艇载具包括“m”型船体、防撞轮和捕获架,所述“m”型船体为无人艇载具主体,所述防撞轮由若干橡胶滚轮和固定支架组成,所述防撞轮均匀安装在“m”型船体周围,所述捕获架由“u”型架组成,分布安装在“m”型船体的船艏和船艉;
4、所述“m”型船体由推进舱和牵引线释放舱组成,所述推进舱和牵引线释放舱为模块化分离设计,所述推进舱安装在船艏,所述牵引线释放舱安装在船艉,所述推进舱和所述牵引线释放舱之间设推进舱螺旋桨运转区和螺旋桨升降区。
5、无人艇载具用于安装推进舱、牵引线释放舱、防撞轮和捕获架等设备,限位牵引线为释放器配套设备,脱离释放舱后快速沉入水中,所述无线操控终端和通信系统用于远程控制无人艇载具推进舱和牵引线释放舱运行。无人艇载具布放限位牵引线能够极大扩大鱼探仪校准的可操作空间,并能够在船舶停泊(下锚)状态下绕穿锚链开展限位牵引线布放工作以减少对船舶停泊安全的风险。“m”型船体在提升便捷性的同时增强其抗浪性和适航性,防撞轮用于在恶劣海况条件或操作不当情况下航行防止撞击船舶出现损坏或者侧翻,“u”型架设计充分考虑到在布放和回收无人艇载具时的便捷性。推进舱和牵引线释放舱为模块化分离设计可以避免布放过程中螺旋桨与限位牵引线的相互干扰和缠绕。
6、进一步优选,所述推进舱由可升降螺旋桨、电机、控制系统和电池模块组成,所述可升降螺旋桨安装在推进舱的尾部,所述电池模块为独立密封舱结构。
7、可升降螺旋桨用以在布放过程中适应不同海况条件,考虑到不同水域环境及海况条件对无人艇载具的适航要求并减少对螺旋桨的磨损,电池模块采用独立密封舱以增强电池续航时间和安全。
8、进一步优选,所述牵引线释放舱由拆卸式滚轴、环抱式轴盘、交叉卡带束线器、旋转座和电机控制器组成,所述拆卸式滚轴由一柱形轴、快拆紧固件组成,所述柱形轴一端设有齿轮,所述齿轮与电机控制器垂直连接,所述柱形轴的另一端设有轴承,所述轴承与旋转座通过螺丝紧固连接,所述电机控制器与所述旋转座对称安装在所述牵引线释放舱的两侧,所述环抱式轴盘通过快拆紧固件安装在拆卸式滚轴上,所述交叉卡带束线器平行于拆卸式滚轴安装在牵引线释放舱的尾部。
9、电机控制器用于控制拆卸式滚轴旋转和制动和交叉卡带束线器运转,轴盘并能实现轴间距的调整,交叉卡带束线器用于实现牵引线控制。
10、进一步优选,所述环抱式轴盘由空心圆盘和轴盘紧固夹片、轴盘弹簧、轴盘螺纹孔、紧固环组成。根据现场实际需求调节各部件实现轴盘间距的调整。
11、进一步优选,所述交叉卡带束线器由导线环、交叉卡带、旋转纽和电机控制器组成,所述牵引线释放舱的尾部设有一镂空槽,所述导线环安装在所述镂空槽的中央,所述旋转纽对称安装在导线环两侧且与电机控制器连接,所述导线环上方设计有若干矩形口,所述交叉卡带两端设计有圆形孔,所述交叉卡带从所述矩形口交叉伸出后通过螺丝与旋转轴盘连接。
12、电机控制器控制旋转纽带动卡带双向交叉移动实现对孔径的控制以满足不同直径限位牵引线的约束。
13、进一步优选,所述导线环由一宽型镂空带和窄型带组成,所述旋转纽由一旋转轴盘和卡条组成,所述旋转轴盘上设有若干螺纹孔用于连接交叉卡带和旋转轴盘。
14、进一步优选,所述限位牵引线由沉锤限位器和沉水绳组成,所述沉锤限位器是开合式沉锤限位器或者封闭式沉锤限位器,所述沉锤限位器包括若干抱合式柱型构件、嵌入环、弹簧、伸缩开关、嵌入槽、螺纹孔和紧固夹片,沉锤限位器固定在沉水绳限定位置上。
15、在牵引线布放过程中可根据实际需求选用封闭式沉锤限位器从牵引线始端穿过,嵌入环在前,顺势提拉牵引绳增加封闭式沉锤限位器沉力,封闭式沉锤限位器与开合式沉锤限位器碰撞后,嵌入环会触发伸缩开关进入嵌入槽并锁定,以实现牵引线的快速下沉。沉锤限位器和沉水绳组合设计,充分考虑到不同船舶及海域环境下沉锤在沉水绳的限定位置,并能够使限位牵引线在布放过程中快速下沉以实现对船舶底部设备的风险控制。
16、进一步优选,所述无线操控终端由船体推进模块和牵引线释放模块组成,船体推进模块由一航速控制端、航向控制端和螺旋桨升降控制端组成,牵引线释放模块由一滚轴控制端和交叉卡带束线器控制端组成,所述通信系统采用rf点对点双向通讯用于无人艇载具和无线操控终端之间的通讯及数据传输。
17、鱼探仪校准牵引线无人释放器通过无线操控终端控制无人载具能够快速高效的实现鱼探仪校准前的牵引线布放工作,实现了牵引线布放的无人化,防撞轮和捕获架设计也增强工作的安全性和高效性。无人载具结构简单,操控性强,推进舱和牵引线释放舱采用模块化分离设计,能够做大程度减少螺旋桨和牵引线的相互干扰和缠绕,增强布放工作的安全性和可控性。牵引线释放舱和限位牵引线中,拆卸式滚轴、环抱式轴盘、滑轨束线器、沉锤限位器和沉水绳等组合设计,能够在布放过程中实现对牵引线的远程控制,并能保证牵引线快速下沉,布放至换能器中心的船舶横断面内。
18、本发明的有益技术效果:
19、1.鱼探仪校准牵引线无人释放器能够通过岸基操控终端实现鱼探仪校准牵引线的快速高效无人远程布放工作;
20、2.鱼探仪校准牵引线无人释放器考虑到了实际操作的便捷性和轻量化,且结构简单、容易实现,现场可操作性强,尤其适用于极地、低纬等极端海洋环境;
21、3.鱼探仪校准牵引线无人释放器有较好的适航性,并能够通过锚链等难抵达区;
22、4.鱼探仪校准牵引线无人释放器能够实现牵引线释放舱的远程控制;
23、5.推进舱和牵引线释放舱模块化设计分离式安装能够避免螺旋桨与牵引线的相互干扰;
24、6.交叉卡带束线器设计能够实现对孔径的控制以满足不同直径限位牵引线的约束。
- 还没有人留言评论。精彩留言会获得点赞!