一种水下爬行打捞机器人及打捞方法与流程
本发明涉及水下打捞作业设备领域,尤其涉及一种一种水下爬行打捞机器人及打捞方法。
背景技术:
1、海洋或湖泊水域中的水底泥沙中存在鱼雷、潜艇之类的目标物多为长圆柱体外形难以打捞的物体,因为体积质量较大,人力打捞并不能高效完成作业;深陷于泥沙中也使打捞作业存在困难,为防止技术泄露、减少经济损失或获得故障数据,对于这类沉埋目标物的打捞变得十分必要且紧迫。因此需要一种能够高效抓取打捞鱼雷,潜艇之类物体的设备。
2、中国专利文献cn111268063a公开了一种适用于长柱状设备的水下抓取式打捞装备与方法,包括主结构、吊点、滑橇、抓取提升装置、水下控制系统、第一水泵、第一喷冲管系、喷口、第二水泵、第二喷冲管系(、推进器以及目标探测传感器;本发明能够高效的将左卡爪与右卡爪爪入较硬的淤泥,提高了抓取成功的概率;解决了被打捞物体不在卡爪正下方的偏斜适应问题;解决了被打捞物体埋在泥土下方不能提升的问题;解决了卡爪不能抓入泥土的问题;解决了打捞装备在水下定位定首向的问题。
3、然而沉入水底泥沙或者淤泥中的长圆柱物体通常并非表现为全部沉埋状态,其状态主要表现为带有一定的倾斜角度的斜向插入水底,即为一部分裸露淤泥外,一部分沉埋于淤泥中。使用上述公开文献中所用技术手段对其进行打捞时实际上包含了挖掘整片淤泥的过程;类似挖掘机。在遇到湖底或海底为松软的淤泥环境时,目标物反而容易在挖掘过程中完全埋入淤泥中,不但使得挖掘工作变得困难,需要完全挖开所有淤泥才能打捞出目标物,还容易使目标二次松动对其造成破坏。因此上述公开文献中所用技术手段适用于打捞处于完全掩埋状态下或者完全暴露状态下的物体,并不适用于斜向插入淤泥或底沙中的物体。
4、结合对国内外水下打捞作业现状的调研及陆上对淤泥吸附力的试验,目前国内外对沉埋产品的打捞较少,成功打捞案例也仅限于目标物沉埋面积较小,淤泥吸附力不大,便于夹持打捞;对于沉埋较深的目标物,打捞过程中发生钛合金机械手被拉断的案例;淤泥吸附力试验亦证明打捞时目标物埋入部分的淤泥吸附力远大于目标物本身重量,传统生拉硬拽的方式已不能满足打捞需求。因此,迫切需要提出一种打捞装置,革新打捞方式,解决部分沉埋湖底或海底淤泥环境中的目标物打捞问题。
技术实现思路
1、为解决现有技术问题,本发明的目的在于提供了一种水下爬行打捞机器人及打捞方法,基于目标物沉埋难以打捞的现状,该机器人在传统打捞方式基础上,创新性地将目标物夹持、沿目标物轴向运动、表面淤泥清除、定位重心、自锁夹持与打捞等结合,实现沉埋目标物的打捞。
2、具体内容如下:
3、一种水下爬行打捞机器人,包括:
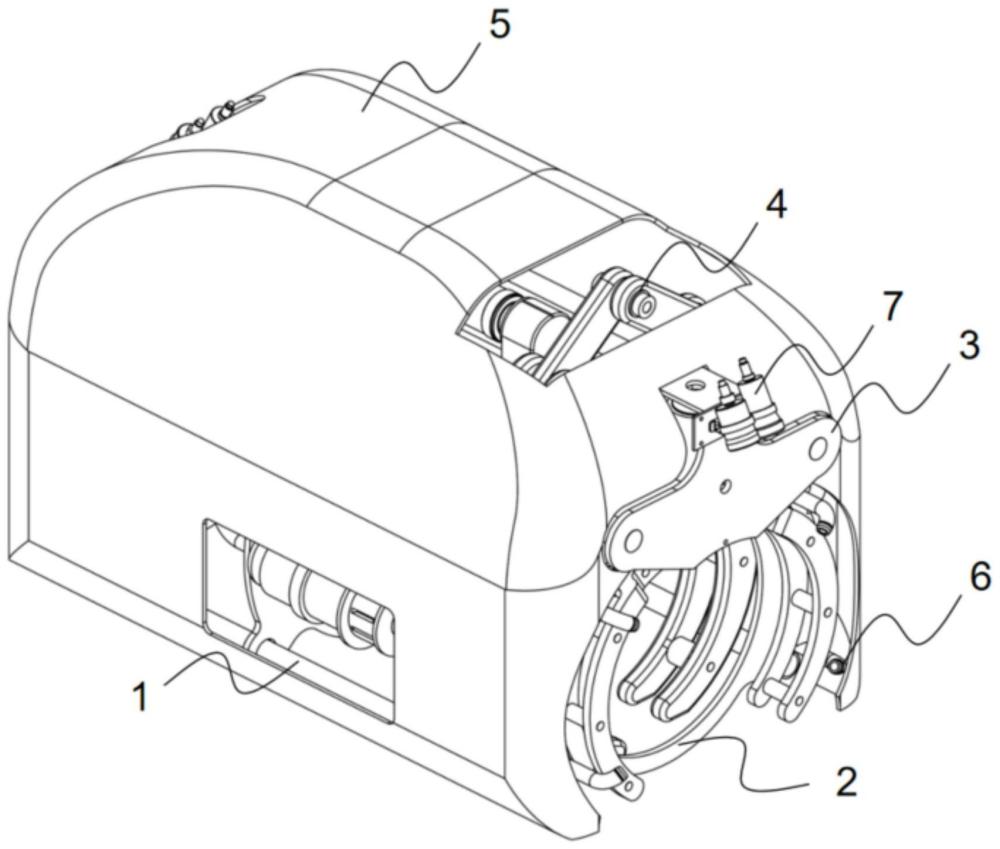
4、支撑框架,包括若干滑动杆和若干支撑板;所述支撑板中心开设有打捞孔,边缘开设有安装孔;待打捞物能穿过所述支撑板中心开设的打捞孔;所述若干支撑板板面相互平行且有一定间隔排列,所述若干滑动杆穿过所述支撑板上开设的安装孔与所述支撑板固定连接;所述若干滑动杆相互平行;
5、夹持部,设置安装在所述滑动杆上,能夹持住穿过所述支撑板的待打捞物;所述夹持部包括活动夹持部和固定夹持部,分别位于所述滑动杆两端;所述固定夹持部相对所述滑动杆固定安装;所述活动夹持部能沿所述滑动杆滑动;
6、直线伸缩机构,固定设置安装在所述支撑板上,其伸缩端与所述活动夹持部连接,通过所述直线伸缩机构能让所述活动夹持部沿所述滑动杆滑动;
7、控制仓,设置安装在支撑板板面上,用于控制各部件运行。
8、进一步地,所述支撑板包括前支撑板、后支撑板和中支撑板,所述前支撑板和所述后支撑板设置安装在所述滑动杆两端,所述中支撑板设置安装在所述滑动杆中段;所述固定夹持部设置安装在所述后支撑板外侧,所述活动夹持部设置安装在所述中支撑板与所述前支撑板之间;所述直线伸缩机构设置安装在所述中支撑板上,其伸缩端与所述活动夹持部固定连接且伸缩方向与所述滑动杆平行;通过所述直线伸缩机构伸缩端伸出或缩回能让所述活动夹持部沿所述滑动杆移动。
9、进一步地,所述直线伸缩机构包括推杆、套筒、驱动电机和传动模块;所述套筒一端与所述中支撑板固定连接,另一端连接所述传动模块后与所述后支撑板固定连接;所述中支撑板上开设有通孔,所述推杆一端穿过通孔活动安装在所述套筒中,另一端与所述活动夹持部连接;所述推杆与所述套筒为丝杆螺母形式的连接;所述驱动电机设置安装在所述传动模块上,所述驱动电机通过传动模块传动后能让所述推杆从所述套筒中伸出或缩回。
10、进一步地,还包括水下打捞夹持器;所述水下打捞夹持器设置安装在所述传动模块与所述后支撑板之间,包括两个打捞夹钳、两个打捞夹持连杆;所述打捞夹钳为“j”形,两个打捞夹钳中段相互铰接,两个打捞夹持连杆一端相互铰接,另一端分别于两个打捞夹钳的直线端铰接;两个打捞夹持连杆相互铰接的铰接点为吊点,打捞时提升吊点,两个打捞夹钳夹拢环抱住待打捞物。
11、进一步地,还包括喷冲部,所述喷冲部包括若干高压喷冲头和高压水泵;所述高压水泵设置安装在中支撑板板面上;所述高压喷冲头设置安装在前支撑板和后支撑板外侧,与所述高压水泵出水端通过管道相连;所述高压水泵可将水体吸入后通过所述高压喷冲头喷出对穿过支撑板的待打捞物表面进行清洗。
12、进一步地,还包括摄像照明系统与外壳,所述摄像照明系统设置安装在活动夹持部和固定夹持部外侧,用于拍摄待打捞物情况;所述外壳与前支撑部和后支撑板固定装配,相对打捞孔位置开设有孔。
13、进一步地,所述夹持部包括夹持电机、传动丝杆、滑块、丝杆座、两个夹持夹钳、两个夹持连杆和安装架;所述夹持电机输出端与所述传动丝杆一端固定连接,所述传动丝杆另外一端穿过所述滑块与所述丝杆座可转动连接;所述夹持夹钳为圆弧形,所述丝杆座两端分别与所述夹持夹钳一端铰接,所述滑块两端分别与所述夹持连杆一端铰接,所述夹持连杆另一端与同侧的所述夹持夹钳铰接;当夹持电机转动时驱动传动丝杆旋转,所述滑块沿传动丝杆轴向直线移动,同时带动夹持夹钳绕其与丝杆座的交接点张开或闭合,对待打捞物进行夹持与松开;所述安装架顶部与所述夹持电机顶部相连,所述安装架底部夹住所述丝杆座两侧,与所述丝杆座固定连接;所述安装架两侧开设有通孔,所述夹持部设置安装在所述滑动杆上时所述滑动杆穿过所述安装架上开设的通孔。
14、一种水下爬行打捞机器人的打捞方法,打捞时先将打捞机器人前支撑板一端套入待打捞物未掩埋的一端;然后通过控制仓控制活动夹持部夹住待打捞物;接着打开喷冲部对待打捞物表面进行喷冲,同时启动驱动电机转动让推杆缩回套筒,缩小活动夹持部与固定夹持部之间的距离;固定夹持部活动到预定位置后驱动电机停转,控制仓控制固定夹持部夹住待打捞物,活动夹持部松开待打捞物;然后启动驱动电机转动让推杆伸出套筒,增加活动夹持部与固定夹持部之间的距离,使机器人沿待打捞物轴向爬行运动;机器人运动到达待打捞物重心位置后控制仓控制固定夹持部和活动夹持部一起夹住待打捞物,吊起机器人完成打捞。
15、进一步地,机器人运动到达待打捞物重心位置后控制仓控制固定夹持部和活动夹持部一起夹住待打捞物,同时吊起水下打捞夹持器,随着打捞缆拉力增加,水下打捞夹持器对目标物的夹持也越紧,然后吊起机器人完成打捞。
16、进一步地,在打捞过程中通过摄像照明系统观察水下情况。
17、本发明相对现有技术存在如下有益效果:
18、(一)继承传统打捞方式的优点,使用水面支持配合水下作业方式进行打捞,充分利用水面母船、吊车、人机交互平台等辅助水下作业,减少水下爬行打捞机器人的设计难度,集中优势用于沉埋目标物的打捞设计,同时先夹持再打捞符合基本的作业流程,在此基础上进行功能拓展;
19、(二)创造性提出沿目标物轴向爬行技术,将打捞夹持与运动夹持分开,设计一套有关运动的夹持部,即活动夹持部和固定夹持部,交替进行夹持与松开;设计一套伸缩系统直线伸缩机构,利用推杆与套筒的相对运动,实现水下爬行打捞机器人对目标物的有效夹持与轴向爬行运动,为进一步喷冲清淤提供支持;同时轴向爬行运动使得水下爬行打捞机器人能够运动至目标物重心位置,实现打捞夹持点在重心处,防止打捞时目标物倾斜滑脱;
20、(三)将水流喷冲技术应用到水下打捞,利用水流量的变化实现不同的喷冲力,对目标物表面淤泥进行喷冲,极大减小淤泥对目标物的吸附力,同时配合轴向爬行运动,实现对整个目标物表面淤泥的有效清除,为进一步夹持打捞提供支持;
21、(四)设计有打捞夹持器,不同于有关运动的夹持器,其结构强度大能够承受大载荷;打捞夹持器通过巧妙设计使其具有自锁紧功能,即在结构强度允许范围内,目标物越重,拉力越大,夹钳锁得越紧不容易发生夹钳松脱;同时夹紧力越大使得目标物与夹钳之间的摩擦力越大,目标物不容易从夹钳中滑出。
- 还没有人留言评论。精彩留言会获得点赞!