用于海洋船舶的联合推进和运动控制的驱动单元的制作方法
本公开总体涉及船用推进系统。公开了提供船舶的集成推进和运动控制的驱动单元和相关联的控制系统,其中运动控制可包括以下任一者:纵倾控制、横摇稳定或船舶位置控制。本文讨论的驱动单元适合于由燃烧发动机、电机或混合动力传动系统提供动力。
背景技术:
1、现代船用推进系统通常包括提供向前推力的主推进器,诸如螺旋桨装置或喷水系统,以及一个或多个单独的运动控制系统,诸如控制船体相对于水平面的纵摇角的纵倾系统以及减轻船舶横摇和纵摇运动的稳定器系统。
2、ep2703279a1描述了一种用于船舶的示例运动控制系统,该运动控制系统包括被设计为优化船舶在水中移动的运动行为、特别是船舶的纵倾角的拦截器。
3、us 7,240,630描述了另一种包括陀螺仪稳定器系统的运动控制系统,该陀螺仪稳定器系统可用于减轻船舶由于风和波浪而产生的横摇运动。
4、拥有单独的推进系统和运动控制系统会导致复杂性和成本。期望提供简化的更高效的船用推进系统。
技术实现思路
1、本公开的各方面涉及一种用于海洋船舶的推进和运动控制的驱动单元,即,同时用作主推进器和运动控制系统的驱动单元。驱动单元在使用中沿着驱动单元的竖直轴线从船舶向下延伸到垂直于竖直轴线的基平面。驱动单元的基平面由彼此正交的纵向轴线和横向轴线跨越,其中纵向轴线在标称推力方向上延伸,并且横向轴线横向于标称推力方向。驱动单元包括沿着横向轴线分开布置并与基平面相交的第一推进单元和第二推进单元,即,推进单元并排布置并位于基平面中。第一推进单元和第二推进单元可与主驱动单元主体一起绕竖直轴线联合旋转,这意味着驱动单元推力的方位角可通过第一推进单元和第二推进单元的联合旋转来控制。第一推进单元和第二推进单元还可绕横向轴线单独旋转,即,两个推进单元可彼此独立地单独调整仰角,使得一个推进单元相对于基平面具有一个仰角,并且另一个推进单元相对于基平面具有另一个仰角。
2、本公开的各方面可寻求提供更高效且紧凑的驱动单元,该驱动单元为船舶提供主推进力,同时允许船舶的高级运动控制,诸如纵倾控制、动态横摇稳定和动态纵摇运动控制。驱动单元主体绕其竖直轴线自由旋转的能力与两个推进单元绕横向轴线自由旋转的能力相结合提供了多个维度上的控制自由度,该控制自由度可用于在不同方向上产生推力以及船舶的横摇和纵摇运动。
3、驱动单元包括某种形式的船体安装接口,该船体安装接口可与竖直轴线相交。船体安装接口将驱动单元连接到船舶。各种船体安装接口都是可能的,诸如安装在船体下侧的接口,或者类似于舷外发动机安装接口的安装在船舶横梁处的接口。
4、第一推进单元和第二推进单元优选地被布置成使得它们可绕竖直轴线联合旋转至少360度,即,整圈。这意味着推力的方向可指向整圈上的任何位置,使得驱动单元可通过绕竖直轴线转动驱动单元主体以配置不同方位角的推力来产生向前推力、横向推力和反向推力。发动机和驱动单元之间不需要变速箱,因为驱动单元可旋转180度以在硬制动操作期间提供反向推力。
5、第一推进单元和第二推进单元还可绕横向轴线单独旋转至少270度。这意味着推进单元可被配置为面向相反的方向,从而产生绕竖直轴线的转动力。还可实施超过360度的旋转,诸如整圈旋转。还可使用更小的旋转跨度,即,大约+/-30度的量级。
6、当涉及由驱动单元产生不同的推进力和力矩时,驱动单元主体绕竖直轴线自由旋转的能力和推进单元绕横向轴线单独旋转的能力提供了极大的灵活性。如下面将更详细地解释,驱动单元可用于提供在水中驱动船舶的主推进力,同时当船舶在水中移动时通过以动态方式调整驱动单元的方位角和仰角来执行船舶的运动控制,即,纵倾控制、横摇稳定和纵摇运动控制。
7、第一推进单元和第二推进单元可选地包括相应的扁圆水翼平面构件,即,固定地连接到推进单元并且可与推进单元一起绕横向轴线单独旋转的翼状平面部分。推进单元绕横向轴线的旋转确定了推进单元的扁圆水翼平面构件与驱动单元的基平面之间的角度,并且因此也确定由水翼构件产生的升力或反升力。水翼平面构件可用于产生升力、反升力、船体的横摇运动以及船体的纵摇运动,这是一个优点。
8、每个推进单元可选地包括连接到齿条和小齿轮装置的电动或液压仰角马达,该齿条和小齿轮装置被布置为控制推进单元(和可选的水翼平面构件)绕横向轴线的旋转。如果推进单元被布置为绕横向轴线更自由地旋转,即,在更大的角跨度上旋转,则齿条和小齿轮装置可由环形齿轮和小齿轮装置代替。
9、驱动单元可选地包括主排气通道,该主排气通道从形成在驱动单元的船体接口中的输入孔延伸到与基平面相交的分支点。第一排气通道分支和第二排气通道分支从分支点延伸到分别形成在第一推进单元和第二推进单元中的输出孔。这样,来自例如内燃发动机的废气可被向下引导到驱动单元中并在水面下释放,这是一个优点,因为这样废气对于船上的人来说几乎察觉不到。
10、驱动单元可选地包括沿着竖直轴线向下延伸到中心锥齿轮的竖直驱动轴。第一横向驱动轴和第二横向驱动轴沿着横向轴线从中心锥齿轮向外延伸到第一推进单元和第二推进单元,其中相应的外锥齿轮装置将横向驱动轴连接到第一推进单元和第二推进单元的螺旋桨轴。因此,中央动力源可用于以高效的方式为两个推进单元提供动力。驱动单元主体绕竖直轴线的旋转和推进单元绕横向轴线的单独旋转不受该传动装置阻碍,这是一个优点。
11、第一推进单元和第二推进单元可选地包括被布置为向推进单元的相应推进器提供动力的水下电力推进机器,有时被称为吊舱驱动器。在这种情况下,电线束例如从形成在驱动单元的船体安装接口中的连接器向下延伸到驱动单元中就足够了。吊舱驱动解决方案可与涉及驱动轴和锥齿轮的解决方案组合。
12、上述吊舱驱动解决方案的每个电力推进机器可选地围绕中空定子形成,其中在纵向轴线的方向上穿过中空定子形成水通道。这样,可实现高效的冷却,同时降低水阻力。第一推进单元和第二推进单元还可各自包括沿着纵向轴线分开的两个电动推进机器,其中每个电动推进机器被布置成向相应的螺旋桨提供动力。
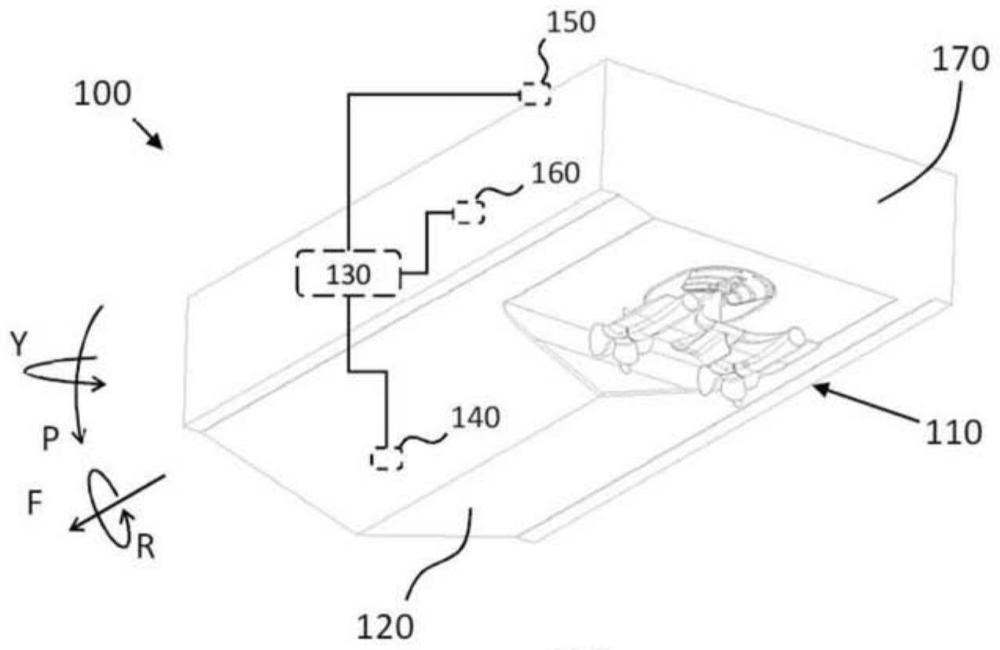
13、在一些示例中,驱动单元还包括控制单元,该控制单元被布置为例如从船舶上的一个或多个传感器系统获得船舶的当前运动以及船舶的期望运动。然后,控制单元可被布置为调整驱动单元绕竖直轴线的旋转和/或推进单元绕横向轴线的旋转以减少船舶的当前运动与船舶的期望运动之间的差异。这样,控制单元可被配置为控制驱动单元的不同自由度,以当船舶在水中移动时实现船舶的期望运动行为。下面给出控制单元进行运动行为控制的若干示例。
14、根据一个示例,船舶的当前运动和期望运动包括船舶相对于地面的运动,并且期望运动对应于船舶的静止,即,船舶相对于地面上的位置保持就位的操作状况。然后,控制单元被布置为至少调整驱动单元主体绕竖直轴线的旋转,以保持船舶相对于地面静止。该应用通常称为辅助入坞或虚拟锚定。一个优点是驱动单元能够在不需要船舶上的附加控制系统的情况下执行该功能。
15、根据另一个示例,船舶的当前运动和期望运动包括船舶的横摇角和/或横摇运动,并且控制单元被布置为调整推进单元绕横向轴线的相应旋转以设置船舶的期望横摇角和/或减少船舶的横摇运动。这样,控制单元使用推进单元的不同控制自由度以减轻船舶在水中移动时的横摇运动。
16、根据又一个示例,船舶的当前运动和期望运动包括船舶的纵摇角和/或纵摇运动,并且控制单元被布置为调整推进单元绕横向轴线的相应旋转以设置船舶的期望纵摇角和/或减少船舶的纵摇运动。因此,驱动单元用于船舶的纵倾控制,而无需任何附加的纵倾支持致动器系统。
17、上述方面、所附权利要求和/或本文在上文和下文中公开的示例可适当地彼此组合,这对于本领域的普通技术人员来说是显而易见的。
18、附加特征和优点在以下描述、权利要求和附图中公开,并且部分地对于本领域技术人员而言将是显而易见的或者通过如本文描述实践本公开而认识到。本文还公开了与上文讨论的技术益处相关联的控制单元、计算机系统、计算机可读介质和计算机程序产品。
- 还没有人留言评论。精彩留言会获得点赞!