双体减震无人艇的制作方法
本发明属于水上航行器领域,具体地,涉及一种无人艇。尤其是高速双体减震无人艇。
背景技术:
1、无人艇相比于有人船具有环境要求低、人员安全友好、作业时间长、人员数量要求低、任务效率高等优点,在海洋事业发展中已经取得了越来越重要的地位。为完成要地侦察、环境检测、港口安全、无人巡逻、设备巡检等任务,无人艇需要搭载对应的任务载荷。为完成相应的任务,无人艇需要实现环境感知与导航定位,用于实现自动控制算法,而感知定位一般都依赖于惯性导航装置。
2、现有的无人艇功能载荷一般在作业中需要相对平稳的环境,如拖缆绞车、机械臂、传感器等等,都需要无人艇相对平稳,如果无人艇发生剧烈颠簸,则无法作业甚至可能损毁设备。
3、现有的惯性导航装置一般依赖于其自身内置的力传感器计算加速度,并根据加速度积分进行速度和角速度计算,进一步计算传感器对应的位姿。惯性导航装置一般内置滤波算法,对惯性导航装置使用过程中的噪声进行过滤。安装在船舶上的惯性导航装置,当船舶处于剧烈颠簸时,其内部的算法无法对噪声进行有效滤波,往往导致加速度和角加速度测量误差激烈增大,产生巨大的虚速度和虚角加速度,产生错误的位姿测量结果。
4、由于载荷设备和传感器设备对颠簸的敏感性,现有的无人艇一般用于较良好海况下,使用的场景较为受限。
5、此外,现有的无人艇减震设计一般比较简单,主要依赖于浮筒本身的柔性和连接处本身的柔性进行抵消,没有具体针对性的设计。特别地,没有对船舶首向海浪冲击、船舶升沉和船舶侧向海浪冲击的减震设计。
6、相关的现有技术主要有:
7、一种新型结构双体船(专利文献cn10667771a)该专利文献提供一种新型结构双体船,其减震结构工作方式为对于小规模震动,主要依赖于支撑架5及其附属减震机构实现对能量的吸收与耗散;对于恶劣海况下的大幅度震动,依赖前支撑3的倾斜与阻尼球铰耗散能量;双侧浮筒的运动存在耦合。当前方来浪,波浪较窄,只造成一方浮筒上翘,由于前支撑的连接设计,必然导致另一侧浮筒下摆。即:为了抵抗一侧浮筒的运动,减震机构会导致另一侧浮筒的运动。当波浪只是单纯造成一侧浮筒上翘时,另一侧浮筒依然会被迫下摆,反而导致无人船上部平台的不稳定;且该技术方案减震机构设计没有针对单侧浮筒升沉的减震机构设计。当大型波浪从无人船侧向行进,刚好只抬升了一侧浮筒时,无法抵抗,会造成船体整体向一侧倾斜翻转,甚至可能造成船只倾覆。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种双体减震无人艇。
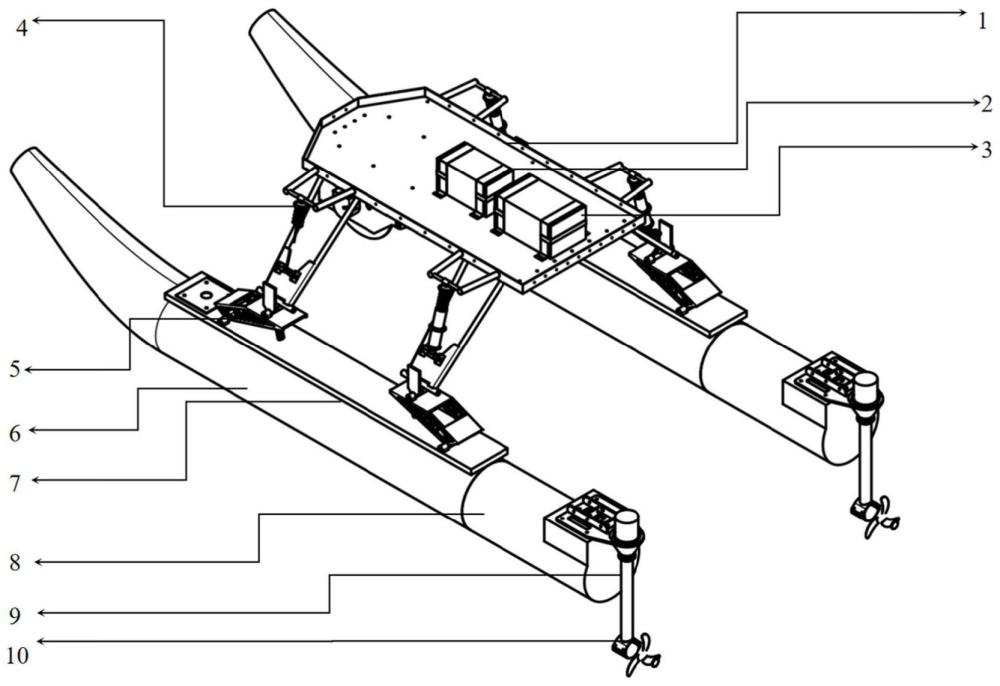
2、根据本发明提供的一种双体减震无人艇,包括:上部平台、减震支撑机构、浮筒、连接板;
3、所述上部平台由一钢制带边框和加强筋的平板制成,设置有预制螺栓孔位;
4、所述减震支撑机构设置于上部平台和连接板之间;
5、所述连接板为与浮筒连接的硬质钢板,通过螺栓连接于浮筒的下部浮筒,所述连接板的上方设置有铰链安装孔,安装减震支撑机构。
6、优选地,所述的一种双体减震无人艇还包括:工控机箱、电池箱;
7、所述工控机箱为可实现电磁屏蔽的、设置有绝缘底座的钢制计算机箱,工控机箱的箱体上开有通风孔,顶部设置有防晒隔热设施;
8、所述工控机箱设置在上部平台上;
9、所述电池箱为安装有绝缘外壳的钢制外壳箱体,开有通风口以便散热,紧固安装在上部平台上。
10、优选地,所述减震支撑机构包括:主减震机构、副减震机构;
11、所述主减震机构连接于副减震机构;
12、所述主减震机构可平行于船舶横剖面的平面内进行旋转;
13、所述副减震机构在主减震机构的径向平面内进行旋转。
14、优选地,所述的一种双体减震无人艇,还包括:浮筒延伸筒(8);
15、所述浮筒包括两只基于橡胶或玻璃钢或不锈钢材质的圆柱形浮筒,以及跨设在圆柱形浮筒上的船舶平台及附属结构;浮筒前方有圆弧形上扬;
16、所述浮筒延伸筒为从浮筒后部延伸出的封闭硬质圆柱形浮筒,设置有安装孔位和卡槽;
17、所述浮筒延伸筒与浮筒纵向通过加强筋连接。
18、优选地,所述的一种双体减震无人艇,还包括:螺旋桨吊放机构、螺旋桨;
19、所述螺旋桨吊放机构用于从浮筒延伸筒上吊放安装螺旋桨,安装采用螺栓紧固;
20、所述螺旋桨设置于浮筒延伸筒后部。
21、优选地,所述副减震机构设置有一个桁架,一个上部铰链孔,一个下部铰链孔,一根弹簧;设置于船首和船尾的副减震机构反方向设置,每条无人艇共设置有四套副减震机构;所述副减震机构可平行于船舶中纵剖面方向的平面内进行旋转。
22、优选地,所述主减震机构,包括:减震上支撑臂、支撑臂中连管、弹簧阻尼减震器、转轴衬套、保护肘板、主副减震机构连接铰链、副减震机构减震弹簧、减震摇臂、减震摇臂肘板、桁架、副减震机构铰链;
23、所述减震上支撑臂包括:与上部平台刚性连接的钢制圆管,向上部平台外侧延伸出,每两根减震上支撑臂中间有一根支撑臂中连管连接;
24、所述支撑臂中连管为所述减震上支撑臂间的钢制连管;
25、弹簧阻尼减震器一头与支撑臂中连管铰链连接,弹簧阻尼减震器的旋转轴与支撑臂中连管同轴;另一头与减震摇臂肘板铰接;
26、所述转轴衬套与弹簧阻尼减震器刚性连接,与减震摇臂肘板铰接;
27、所述主副减震机构连接铰链连接主减震机构与副减震机构,主副减震机构连接铰链与主减震机构刚性连接,并使得副减震机构在主减震机构的径向平面内进行旋转;
28、所述保护肘板用以保护主副减震机构连接铰链,并限制副减震机构的最大旋转角度;
29、所述副减震机构减震弹簧为钢制弹簧,一头与连接板铰接,一头与副减震机构上设置的桁架铰接,抵消径向垂直平面内的浮筒运动;
30、所述减震摇臂与上部平台铰接,与主副减震机构连接铰链刚性连接;
31、所述减震摇臂肘板与减震摇臂焊接;
32、所述桁架为钢制框架,一头与主减震机构铰接,另一头与连接板铰接,中间部分与副减震机构减震弹簧铰接,承受来自主减震机构和连接板的压力;
33、所述副减震机构铰链连接桁架与连接板。
34、优选地,所述的一种双体减震无人艇,其特征在于,
35、所述弹簧阻尼减震器由弹簧、液压油缸和活塞机构等部分构成;
36、所述减震摇臂肘板为钢制板材。
37、根据本发明所述的双体减震无人艇的使用方法,包括:
38、步骤s1:副减震机构支撑主减震机构,主减震机构支撑无人艇上部平台;
39、步骤s2:副减震机构与浮筒、连接板之间铰链连接,无人艇前部的副减震机构、浮筒、后部的副减震机构组成三连杆机构;
40、步骤s3:浮筒在垂直平面内进行转动;
41、步骤s4:当无人艇的前方出现浪涌时,无人艇前部的副减震机构减震压缩,后部的副减震机构减震弹簧拉伸,浮筒艏部向上旋转,顺应出现在艏部的向上运动趋势,不会直接将浮筒的受力传递到上部平台上,可以使上部平台的运动状态保持相对稳定;
42、步骤s5:当浪涌行进至浮筒的中部时,副减震机构的产生的旋转阻尼无法抵消运动趋势,副减震机构回到正常状态,浪涌一侧浮筒的主减震机构开始向外向上旋转,主减震机构上的弹簧阻尼减震器开始压缩,浮筒整体向上升起而上部平台基本保持不动,不会直接将浮筒的受力传递到上部平台上,使上部平台运动状态保持基本稳定;
43、步骤s6:当浪涌到浮筒后半段时候,无人艇前部的副减震机构减震弹簧拉伸,无人艇后部的副减震机构减震弹簧压缩,浮筒艏部向下旋转,顺应出现在艉部的向上运动趋势,不会直接将浮筒的受力传递到上部平台上,使上部平台运动状态基本保持稳定。
44、根据本发明所述的双体减震无人艇的使用方法,包括:
45、当无人艇的侧方出现浪涌时,主减震机构开始向外向上旋转,主减震机构上的弹簧阻尼减震器开始压缩,浮筒整体向上升起,不会直接将浮筒的受力传递到上部平台上,使上部平台运动状态基本保持稳定。
46、与现有技术相比,本发明具有如下的有益效果:
47、1、本发明采用被动减震机构,利用了相对转动、多连杆机构和弹簧压缩的原理,使得无人艇的双体浮筒可以在激烈的海况和上部平台相对运动。
48、2、本发明可降低船舶上部平台的运动幅度和频率,减少上部平台受到的冲击载荷,有利于完成无人艇任务。
49、3、本发明不需要复杂的自动控制系统,结构简洁,机械加工方便。
50、4、本发明大部分结构加工成本低,对小型高速双体船使用友好。
51、5、本发明双体减震无人艇整体结构设计,将浮筒间的运动解耦,单套减震机构的运动间不互相干扰,可有效耗散波浪能量并降低震动。
- 还没有人留言评论。精彩留言会获得点赞!